模糊PID控制技术在单级高PFC拓扑光伏模拟器设计中的研究应用
2017-08-12孟志强周华安
孟志强 张 凯 周华安 邵 武
1(湖南大学电气与信息工程学院 湖南 长沙 410082) 2(湖南大学机械与运载工程学院 湖南 长沙 410082)
模糊PID控制技术在单级高PFC拓扑光伏模拟器设计中的研究应用
孟志强1张 凯1周华安2邵 武1
1(湖南大学电气与信息工程学院 湖南 长沙 410082)2(湖南大学机械与运载工程学院 湖南 长沙 410082)
研究一种采用基于模糊PID控制的单级高PFC(power factor correction)拓扑光伏电池模拟器。通过这种变流器拓扑可同时实现高功率因数校正以及对实际光伏电池输出I-V特性曲线的跟踪模拟。采取Psim和Matlab/Simulink联合仿真对所设计的模拟器系统进行了仿真分析与研究。仿真结果表明,无论是在静态条件还是外界条件动态变换下该模拟器系统及其控制算法具有快速响应速度和高控制精度。与普通模糊控制算法进行了仿真对比分析,结果显示该算法具有更好的适用性。
光伏模拟器 功率因素校正 BOOST变换器 模糊PID Matlab/Simulink Psim
0 引 言
太阳能光伏发电的研究越发受到人们的关注。在实际研究中,常用一套输出伏安特性与实际光伏电池输出伏安特性近似一致的光伏电池模拟器系统作为实验用电源来代替光伏电池板进行实验。使得光伏发电的实验研究不受外界环境条件的限制,可实时重复性地再现实际光伏电池的输出特性,大大减少研发成本和周期,提高实验结果的可信度[1-2]。
太阳能光伏电池模拟器现阶段的研究主要集中在三个方向:(1) 光伏电池工程数学模型的建立[3-5];(2) 模拟器主电路拓扑结构的设计[6-7];(3) 控制算法的研究[8-9]。光伏电池模拟器主电路结构大多数是采用常见的直流斩波电路,没有考虑到不可控整流桥与输出滤波稳压电容的搭配组合会因较低的功率因数给电网带来谐波污染。同时,现有模拟器跟踪控制算法的控制效果也不是十分理想。
本文研究基于一种单级BOOST型功率因数光伏电池模拟器。该模拟器主电路采用第三绕组实现高功率因数校正及对实际光伏电池输出特性的跟踪模拟。设计一种基于电流反馈的模糊PID控制算法,该算法充分结合了模糊控制算法和传统PID控制算法,算法可以不依赖被控系统精确的数学模型。设计较为简单,抗干扰性强,动态响应迅速,跟踪模拟性能优良,尤其适合对光伏电池这类强非线性系统的控制。通过Matlab中的Simulink与Psim的联合仿真结果显示,本文所设计的这套模拟器及控制算法能够快速、稳定地追踪参考工作点,实现各种条件下I-V特性曲线[10-11]的完整模拟,超调量小于3.2%,稳态误差小于4.6%,而纹波系数小于1.5%,跟踪时间小于0.006 s。
1 方案设计
1.1 系统设计方案
光伏模拟器系统基本上都是由主电路和控制电路两部分组成。如图1所示,主电路主要由不可控整流桥、单级功率变换器电路及负载组成。而控制电路则是如图2所示分为检测采样电路、驱动保护电路,DSP控制器及辅助电源等。单级功率变换器完成有源PFC功率因数校正和光伏电池输出I-V特性曲线的跟踪模拟。控制电路采集光伏模拟器的输出电压Vo与电流Io,通过光伏电池工程数学模型求得模拟器参考输出电流Iref,并与模拟器的实际输出电流Io比较得出电流误差改变量作为模糊PID控制器的输入。经过模糊控制器的处理得到PID控制器三参数的改变量,再对PID初始参数值进行调整,进一步得到单级BOOST型变换器功率开关管的占空比。通过对占空比的控制从而实时控制光伏模拟器的输出电压及电流跟随光伏电池输出特性曲线。

图1 光伏模拟器控制部分

图2 光伏模拟器主电路部分
1.2 单级高PFC的BOOST型变换器
单级高PFC的BOOST变换器如图3所示,同时实现高功率因数校正和DC/DC变换功能,由输入电感Li,储能电容Cb、电力MOSFET、三绕组变压器及倍流整流电路等组成。根据流过输入电感Li及输出电感Lo的电流状态,PFC级和DC/DC级分别有断续(DCM)、临界和连续(CCM)三种工作模式。在占空比一定时,BOOST变换器如果工作在电流断续模式下,输入电流就会自动跟随输入电压,提高功率因数。这样,对功率开关管的控制只需要考虑实现模拟器输出I-V特性的功能就可以了。为了提高DC/DC级的效率、减少电流应力,DC/DC级一般会工作在连续导通模式。

图3 单级高PFC的BOOST变换器
模拟器输出达到稳定状态后,一个开关周期内,其工作过程分为五个线性阶段:
(1) 第一阶段:开关管S开通,D1、D2、D6正向导通;D2、D3、D4关断。S开通,电源给储能电感Li充电,同时储能电容Cb通过S经由变压器原边绕组将能量传递到副边,在负载上得到近似稳恒的直流。
(2) 第二阶段:S关断,D2、D3、D4导通,D1、D5、D6关断。输入电感电流通过二极管D3续流并对储能电容Cb充电。这个阶段输出电感Lo提供输出功率。
(3) 第三阶段 :S关断,D2,D4导通,D1、D3、D5、D6关断。这个阶段,输入电感电流减为0,二极管D3反向截止,施加在励磁电感Lm和输出电感Lo上的电压值分别为(-VCb/m)和(-Vo)。
(4) 第四阶段:S关断,D4导通,D1~D3、D5、D6关断。输出电感电流减为0,加在电感Lo上的电压值为(-VCb/m),电感电流继续线性下降。这个阶段输出电容Co提供输出功率。
(5) 第五阶段:S关断,D1~D6关断。励磁电流减为0,二极管D4截止。 当下一个开关周期到来时,开关S再次开通,电路的工作状态重复前面的五个阶段。
2 控制策略
2.1 模糊PID控制器工作原理
本文算法的结构如图4所示,通过电流电压采样电路采集模拟器在第n个采样周期内,主电路输出的电流Io及输出电压Vo。并将Vo代入到光伏电池输出I-V特性方程中得到模拟器在第n个采样周期光伏电池的参考电流Iref后与输出电流Io作差得到模拟器系统的电流误差e(n),与上一个采样周期的电流误差e(n-1)作差得到模拟器系统在第n个采样周期内的电流误差改变量ec(n)。将误差和误差改变量作为二维模糊控制器的两个输出变量,得到PID控制器的参数调整量Kp′、Ki′、Kd′,经过PID控制器处理得到占空比增量,与上周期占空比叠加得到第n个采样周期开关管的占空比D(n),使模拟器的输出与光伏电池实际工作点电流和电压相匹配,达到模拟光伏电池输出I-V特性的目的。

图4 模糊PID控制器结构
2.2 模糊控制器设计
当光照强度和温度不变时,光伏电池的输出I-V特性方程是可以唯一确定的,即其输出特性方程式(式(1))中,C1、C2在确定光照温度下是唯一确定的。当负载为某一具体阻值时,光伏电池与负载两者的I-V曲线交于点C,模拟器控制策略就是为让模拟器工作在该确定交点C。图5为模拟器的控制目标示意图。
(1)

图5 模拟器控制目标
如图4所示,显然其中e(n)和e(n-1)的表达式为:
图1所示的两端式同轨双车运行模式,同一巷道上两台堆垛机可以同时工作;左端堆垛机服务左端出/入库台,右端堆垛机服务右端出/入库台;两堆垛机的工作区域根据实际工况由列划分,以避免碰撞。
(2)
(3)
ec(n)=e(n)-e(n-1)=
(4)
本文所设计的模糊控制器输入输出变量的论域经量化因子量化后均规范化为[-3,3],隶属度函数采用三角函数,模糊子集为{NB,NM,NS,ZO,PS,PM,PB}。
误差e和误差改变量ec的量化因子Ke和Kec分别取Ke=0.544,Kec=0.633。经过不断的实验及光伏电池输出I-V曲线跟踪模拟的控制经验,可得模糊规则表1,经过模糊规则匹配与模糊推理后,采用重心法解模糊获得需要的精确控制量。

表1 Kp′/Ki′/Kd′模糊规则表
2.3 PID控制器设计
PID控制器原理如图6所示,利用模糊控制算法输出的三参数变化量Kp′、Ki′、Kd′对PID控制器的参数进行适时调整。根据PID控制器的输出数学表达式可以得到开关管的占空比变化量D(n)′,从而实现对电路输出的实时调节。

图6 自整定PID控制结构
PID控制器的输出函数表达式为:

(5)
3 仿真结果及数据分析
3.1 仿真模型

图7 仿真控制部分电路
3.2 仿真结果及分析
光伏电池模拟器的外特性是设计模拟器的目的, 对于给定的光伏电池在一定的光照和温度下其输出I-V特性曲线保持不变,下面给出不同外界条件改变情况下的仿真结果和分析。
3.2.1 负载突变追踪
本实验是在S=1 000 W/m2,T=25 ℃条件下,负载从8 Ω变化到15 Ω过程中,模拟器自动追踪系统工作点的过程。在发生负载电阻值条件突变后,系统调节重新回到稳态工作的时间间隔仅约为0.006 s,系统的稳态误差约为4.6%,纹波系数小于1.5%,超调量小于3.2%。图8、图9显示的分别是负载突变过程中模拟器的输出电流Io、电压Vo、系统参考电流Iref变化。

图8 负载突变模拟器输出电流Io、电压Vo仿真波形

图9 负载突变模拟器输出电流Io与理论电流Iref对比仿真波形
3.2.2 光照强度突变追踪
本实验研究的是在负载Ro=10 Ω,环境温度T=25 ℃,光照度S从900 W/m2依次跳变为950 W/m2、850 W/m2时模拟器输出特性及追踪性能。如图10所示,条件突变后重新到达稳态的时间间隔约为0.003 s。结合仿真波形可以看出,当光照强度S增加时,模拟器的输出电压、电流均有增加,相反则减小。图10、图11显示的分别是光照强度突变过程中模拟器的输出电流Io、电压Vo、系统参考电流Iref。
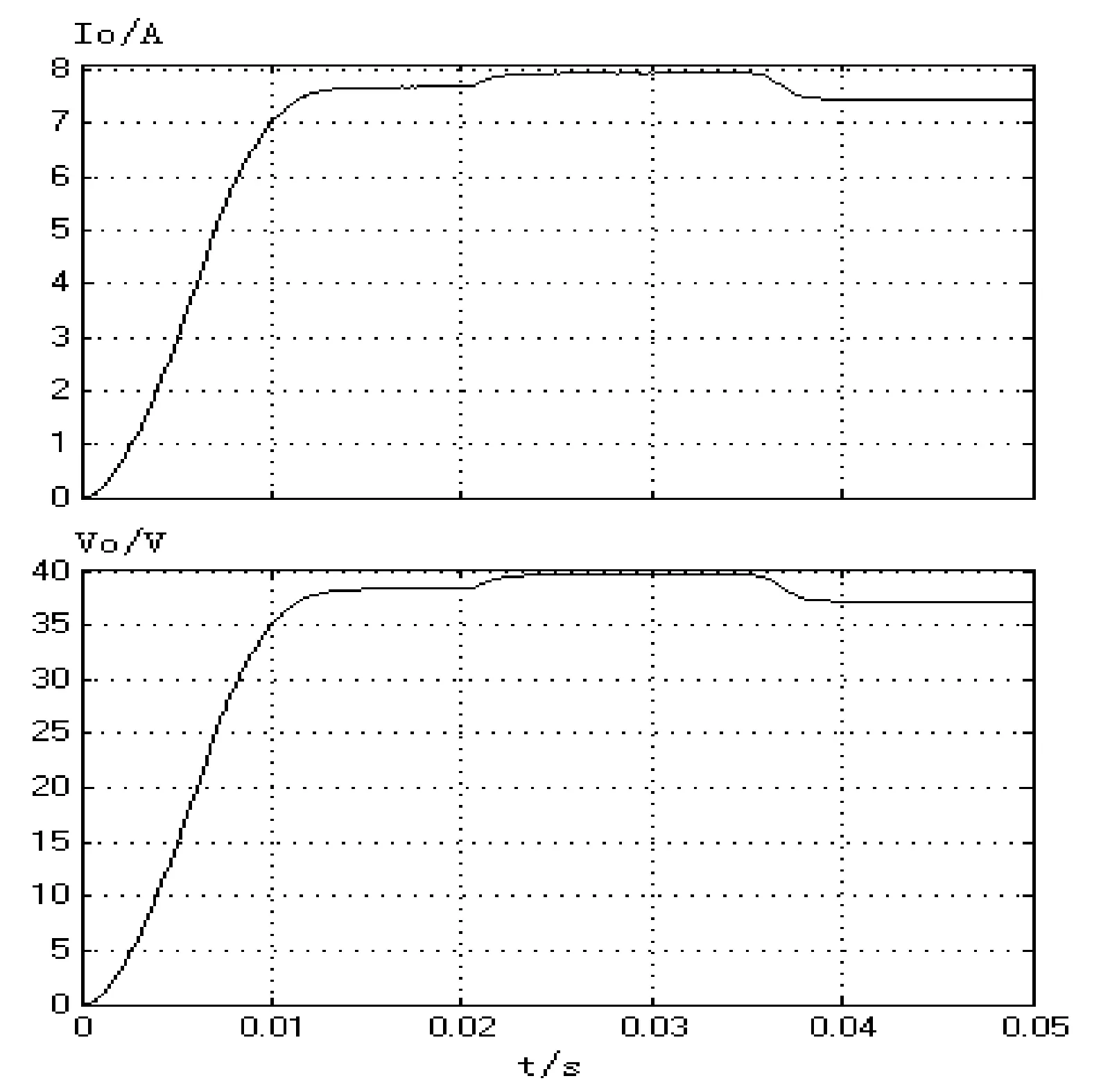
图10 光照突变模拟器输出电流Io、电压Vo仿真波形

图11 光照突变模拟器输出电流Io与理论电流Iref对比仿真波形
3.2.3 温度突变跟踪
本实验研究的是在负载Ro=10 Ω,而光照强度为S=1 000 W/m2,环境温度T从40 ℃依次跳变为60 ℃、25 ℃时模拟器输出特性及模拟器的追踪性能。条件突变后重新到达稳态的时间间隔约为0.005 s。从图12可以看出当环境温度升高时,模拟器的输出电流电压均有所减小,但是电压减小的幅度较大,温度降低时则均增大。而且从图中可以看出,在温度升高所引起的参考电流突变的程度较大。图12、图13显示的分别是温度突变过程中模拟器的输出电流Io、电压Vo、系统参考电流Iref。
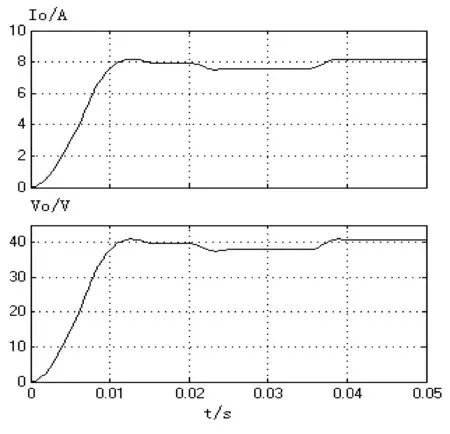
图12 温度突变模拟器输出电流Io、输出电压Vo仿真波形

图13 温度突变模拟器电流Io与理论电流Iref对比仿真波形
3.2.4 算法对比分析
本实验是在光照强度S=1 000 W/m2,环境温度为25 ℃时做负载突变仿真对比研究,电阻Ro由10 Ω在0.2 s突变到15 Ω,模拟器采用普通模糊控制算法和提出的新模糊PID控制算法进行的对比分析。从实验的仿真结果波形来看,相比较普通模糊控制算法的控制效果,本文所采用的新模糊PID控制算法控制效果更为理想。它结合了模糊控制算法和PID控制算法二者的优势,输出特性在负载发生突变或外界环境条件发生改变后能重新追踪到系统的工作点并保持稳定工作状态时间更短,前者需要0.3 s,而新算法仅需要0.24 s,而且新算法系统稳态误差小,带来的振荡更小。模拟器系统的输出电压电流的相对误差更小,从而可以更好地实现光伏电池模拟器作为实验电源的要求。具体仿真结果如图14、图15所示。

图14 普通模糊控制算法下输出电流追踪仿真波形

图15 新模糊PID控制算法下输出电流追踪
4 结 语
本文主要研究基于一种具有高功率因素校正功能的BOOST型变换器,并采用新模糊PID算法控制的光伏电池模拟器。功率主电路采用的是结构简单、成本低、效率高的单级BOOST型高功率因数校正AC/DC倍流整流拓扑结构。从实验结果来看,本文提出的主电路结构实现了输入功率因数的校正及实现模拟光伏电输出I-V曲线的功能,采用的模糊PID控制算法具有快速追踪系统工作点、稳态误差小、输出电压电流纹波小等较出色的控制性能,基本达到预期的控制效果,可以较好地作为实验室光伏发电研究的实验用电源。
[1] Zhou Jianliang,Wang Bing,Zhang Yiming.Par-ameter identification and output power prediction of photovoltaic array based on the measured data[J].Renewable energy resources,2012,30(7):1-4.
[2] 赵剑飞,姜建国.智能太阳电池模拟系统的研究[J].太阳能学报,2012,33(1):18-23.
[3] 傅望,周林.光伏电池工程用数学模型[J].电工技术学报,2011,26(10):211-216.
[4] 程泽,董梦男,杨添剀.基于自适应混沌粒子群算法的光伏电池模型参数辨识[J].电工技术学报,2014,29(9):245-252.
[5] 田琦,赵争鸣,韩晓艳.光伏电池模型的参数灵敏度分析和参数提取方法[J].电力设备自动化,2013,33(5):119-124.
[6] 周华安,王海鸥,孟志强,等.基于TMS320F2812和BUCK电路的光伏阵列模拟器[J].湖南大学学报,2013,40(9):42-47.
[7] 王付胜,文家燕,张兴,等.数字式光伏阵列模拟器[J].太阳能学报,2012,33(3):494-499.
[8] 程昊,胡洁,彭颖红.对焦运动的模糊PID控制方法[J].计算机应用与软件,2016,33(5):77-80.
[9] 黄文超.模糊PID控制的柴油机调速系统仿真[J].计算机应用与软件,2011,28(2):148-151.
[10] 杨永恒,周克亮.光伏电池建模及MPPT控制策略[J].电工技术学报,2011,26(1):229-234.
[11] 诸静.模糊控制理论与系统原理[M].北京:机械工业出版社,2005.
RESEARCHANDAPPLICATIONOFFUZZYPIDCONTROLTECHNOLOGYINDESIGNOFSINGLEHIGHPFCTOPOLOGYPHOTOVOLTAICSIMULATOR
Meng Zhiqiang1Zhang Kai1Zhou Huaan2Shao Wu1
1(CollegeofElectricalandInformationEngineering,HunanUniversity,Changsha410082,Hunan,China)2(CollegeofMechanicalandVehicleEngineering,HunanUniversity,Changsha410082,Hunan,China)
In this paper, a single high PFC topological photovoltaic cell simulator based on fuzzy-PID control is studied. Through this converter topology can simultaneously achieve high power factor correction, as well as the actual PV cell output I-V characteristic curve tracking simulation. The simulation analysis and research for the designed simulator system are carried out by using Psim and Matlab/Simulink joint simulation. The simulation results show that the simulator system and its control algorithm have fast response speed and high control precision both under the static condition and the external condition dynamic transformation. At last, compared with the ordinary fuzzy control, the proposed algorithm has better adaptability.
Photovoltaic simulator Power factor correction Boost converter Fuzzy PID Matlab/Simulink Psim
2016-07-01。国家自然科学基金项目(51377049)。孟志强,教授,主研领域:电力电子变换控制与应用技术,工业过程自动化与测控系统。张凯,硕士生。周华安,高工。邵武,博士生。
TP3
A
10.3969/j.issn.1000-386x.2017.08.015
