基于改进图像自适应算法的车道线识别研究
2017-08-11包晓敏陈家凡吕文涛杨晓城
包晓敏,陈家凡,吴 龙,吕文涛,杨晓城
(浙江理工大学 信息学院,浙江 杭州 310000)
基于改进图像自适应算法的车道线识别研究
包晓敏,陈家凡,吴 龙,吕文涛,杨晓城
(浙江理工大学 信息学院,浙江 杭州 310000)
针对图像自适应阈值分割中最佳阈值的计算问题,提出了一种根据图像结构相似度计算最佳分割阈值的方法。该方法分为模型建立和目标图像阈值计算两部分。模型建立时,首先选取场景标准模板图像,再计算训练图像与标准模板图像对比后的结构相似度,并依据图像质量评价标准判定最佳的阈值,建立特定场景下的最佳阈值与结构相似度的关系模型;阈值计算时,首先计算目标图像与标准模板图像对比后的结构相似度,再根据关系模型,直接计算最佳分割阈值。为验证此方法,选用晴天高速公路场景下的图像进行测试。结果表明,所提算法的阈值分割效果优于传统自适应阈值分割算法,并且具有更高的运算效率。
数字图像处理;图像阈值分割;结构对比度;最佳阈值
0 引言
图像阈值分割在很多工程应用的图像预处理环节中广泛应用,工程师都期望图像分割方法能针对各种图像稳定地得到图像的最佳阈值,图像分割阈值的选取可以通过人工的方式确定,但人工选取阈值,往往要经过大量的实验来确定准确的分割阈值,这样就会导致效率低下。随着现代图像处理技术的发展,更加自动化、智能化地对图像进行快速处理成为可能,从而达到真正意义上的自适应效果。比如自适应算法,典型的有:最大类间方差法(Otsu)、最大熵法(Kapur)以及最小误差分割方法等。但这些图像分割算法缺乏在特定的场景下,能够直接快速得到图像分割最佳阈值的能力。
Otsu[1]基本思想是通过某种准则或模型建立图像的特征描述,并选择合适的灰度阈值将图像分成目标和背景,按照所采用的阈值个数可分为单阈值和多阈值2种方法。但这种算法对于每一灰度值都要反复计算其对应方差,计算量非常大。而且其只考虑了图像的灰度信息,没有结合图像的空间领域信息来分割图像,对含有噪声及光照不均的图像难以获得满意的分割结果。因此按照传统的方法计算最大类间方差已经限制了这种算法的发展。
很多研究人员将一维Otsu扩展到二维,例如范九伦等人[2-4]提出了二维 Otsu 曲线阈值法,采用了与主对角线垂直的斜线按灰度级与邻域平均灰度级之和的大小进行阈值分割。为了使低对比度和低信噪比图像有较好的分割结果,景晓军[5]等结合图像的灰度、均值和中值信息提出了三维Otsu阈值分割法。但三维Otsu时间和空复杂度均较高,因此,徐青等人[6]提出了一种新的基于分解直方图的三维Otsu分割算法,使得三维Otsu算法的执行效率得到有效提高。范朝东等人[7]提出了基于空间界面投影的Otsu图像分割算法。龚劬等人[8]提出了基于分解的三维 Otsu 图像分割快速算法。但该算法计算复杂耗时,不适于对道路场景下车道线的提取。
近年来,针对不同场景而改进的自适应阈值分割算法层出不穷,朱代辉等人[9]针对医学方面提出了医学三维影像体数据阈值分割方法,在激光成像雷达方面,周鑫等人[10]提出的基于阈值分割方法的复杂场景激光图像目标提取算法研究。针对不同的场景需要不同的自适应阈值分割算法,所以特别在道路线检测的场景中,由于场景的复杂性,环境车辆的多变性,导致了其自适应最佳阈值计算的难度大大增加。
在特定的场景中,能精准地计算图像的最佳阈值,从而应用于图像的阈值分割,达到自适应的阈值分割效果,这是一个极具挑战的课题。因此针对高速晴天场景下,提出了一种根据图像结构相似度[11]直接计算用于道路线检测的最佳图像分割阈值的方法。该方法能很好地通过结构相似度计算图像的最佳阈值应对场景的复杂多变,从而进行精准的阈值分割,达到更好地呈现车道线信息,滤除其他不必要干扰信息的目的。
1 算法原理
最常用的阈值分割是一种利用图像中要提取的目标物与其背景在灰度特征性上的差异,把图像视为具有不同灰度级的2类区域(目标和背景)的组合,选取一个合适的阈值,以确定图像中每个像素点应该属于目标区域还是背景区域,从而产生对应的二值图像。在特定的场景中,标准模板图像有其最佳阈值,基于图像的结构相似度公式,则标准模板图像有其固定的亮度、对比度。现实条件中,由于光照不均匀,使得图像中目标物体和背景的亮度不均匀,进而影响着图像对比度。通过将测试图像的亮度、对比度与标准模板图像的亮度[12-13]和对比度进行比较,比较结果越是接近于1,则测试图像与标准模板图像整体的图像结构信息较为接近,且结构相似度依据选定图像和标准模板图像之间的亮度和对比度分布之间的差别,差别越小,表示两图之间的差别越小。而2幅测试图像,如果具有相同的结构相似度,表示这2幅图之间的亮度和对比度分布具有可比性,差别更小,因此具有相同的最佳阈值。可以通过这一点,建立起结构相似度与阈值之间的关系模型。
本文提出了一种根据图像结构相似度计算最佳分割阈值的方法。该方法分为模型建立和阈值计算两部分。模型建立时,首先选取场景标准模板图像,再计算训练图像与标准模板图像对比后的结构相似度,并依据图像质量评价标准判定最佳阈值,建立特定场景下的最佳阈值与结构相似度的关系模型。阈值计算部分包括目标图像与标准模板图像的结构相似度计算,然后将计算得到的数据带入到关系模型中,直接计算最佳分割阈值。该算法的流程图如图1所示。
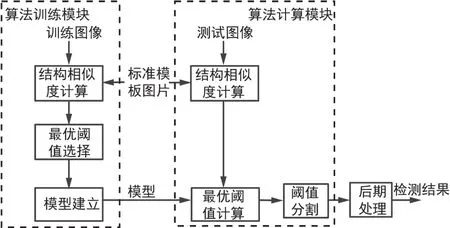
图1 算法流程图
1.1 模型建立
1.1.1 选取标准模板图
对于标准模板图的选取是十分重要,标准模板图的选取要注意:第一点,所关注的重要信息部分,即车道线的信息要完整,在图中能够清晰地呈现出来,无其他不必要的干扰因素,例如车道线的破损,行车道上车辆对车道线的完全覆盖等因素;第二点,即亮度,从图像质量评价标准的角度去分析,亮度是图像的重要特征,在标准模板图中是起到了很重要的作用,如果图像的亮度过低或者亮度平缓,此时图像较模糊,可分辨率低,直接影响后续对于结构相似度的计算。
1.1.2 图像结构相似度的计算
结构相似度是一种用来评价图像质量的一种方法。人类视觉很容易从图像中抽取出结构信息,因此计算2幅图像结构信息的相似性可以用来作为一种检测图像质量好坏的标准。
按照上述的标准模板图的选取条件,进行特定场景下的标准模板图的选取,接着将测试图像与选取的标准模板图进行对比,求出该图像的结构相似度。计算结构相似度的框图如图2所示。

图2 结构相似度计算框图
在相同位置处输入2个信号标准图像块x和测试图像块y,它们的亮度比较函数、对比度比较函数、结构比较函数[14]分别为:
(1)
式中,μx、μy为标准图像与测试图像的亮度均值,σx、σy为标准图像与测试图像的对比度方差,σxy为标准图像与测试图像的协方差。

C1、C2、C3均为很小的正数,结合这3种相似性准则构成了x和y的相似性测度为图像的相似性:
SSIM(x,y)=[l(x,y)]α[c(x,y)]β[s(x,y)]γ。
(2)
1.1.3 训练图像的最佳阈值集
在阈值分割中,利用图像中背景和目标物体的灰度上的差异,把图像视为具有不同灰度级的2类区域(目标和背景)的组合,从而选取一个合适的阈值进行分割。因此在计算单张图像的最佳阈值需经灰度化预处理后,进行固定阈值分割处理,测得最佳阈值。
阈值分割的分割类型取决于门限的设置,本文所选用的是二值分割类型。二值分割中过门限的值置零,其他值设置为maxVal。

(3)
在进行阈值分割操作的时候,需要设置其阈值分割的阈值,则对于最佳阈值的判定,其基本上是基于人的主观判定和所需要保留的信息,所以需要对最佳阈值的选取要有一定的条件,则判断该测试图像的最佳阈值的条件:
① 经阈值分割后的车道线的凸显程度;
② 经阈值分割后的车道上车辆的滤除程度;
③ 经阈值分割后的车道外的无用信息滤除程度;
④ 经阈值分割后图像中央区域是否会出现大面积黑块区域的面积。
1.1.4 特定场景下最佳阈值与结构相似度的关系模型建立
选取测试图像集,经结构相似度和最佳阈值的计算,可得到测试图像集的结构相似度及其对应的最佳阈值的数据集,根据其数据集,采用高斯逼近拟合类型进行数据集的拟合,采用该拟合类型主要在于拟合后的曲线能很好地接近于数据集中的各个点,达到精确度较高的拟合效果,从而建立在特定场景下的最佳阈值与结构相似度的关系模型。高斯逼近公式如下:
(4)
1.2 阈值计算
在根据图像结构相似度计算最佳分割阈值的方法中,模型建立部分得到了计算图像分割最佳阈值的公式,即建立了结构相似度与最佳阈值之间的关系模型。根据建立的关系模型,计算目标图像的图像分割最佳阈值可以按照以下步骤进行:
① 计算目标图像与标准模板图像对比后的结构相似度;
② 将目标图像的结构相似度带入到关系模型中,求得该目标图像的最佳阈值;
③ 按照得到的目标图像的最佳阈值对图像进行分割。
2 实验结果
本文为验证以上方法,选取晴天高速公路作为设定环境,以车道线提取作为目标,进行了图像分割算法仿真。
① 选取标准模板图
选取的晴天高速公路的标准模板图,如图3所示。

图3 选取的标准模板图
② 图像分割的最佳阈值集
选取500幅图像作为模型建立的训练图像,在训练图像的最佳阈值集中,依照判断测试图像的最佳阈值的条件,选取最佳阈值,进行阈值分割后的效果图,如图4所示。

(a)训练图像
(b)最佳阈值分割后的效果
③ 关系模型的建立
本文计算了每一幅训练图像的结构相似度和阈值数值,如图5中的黑点所示。基于鲁棒性和最佳阈值计算的精准度,根据式,本文选择i=4的Gaussian型逼近公式,其系数如表1所示。
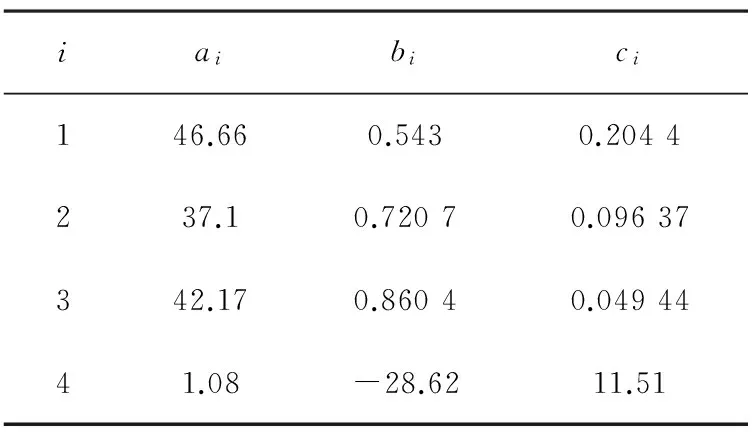
表1 4阶高斯行逼近公式系数
实验数据集及4阶的Gaussian类型拟合如图5所示。
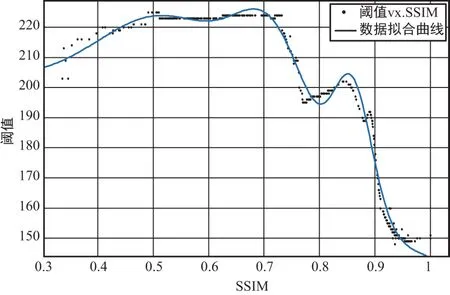
图5 实验数据集及4阶的Gaussian类型拟合
对于该一系列的数据中,可以发现,随着最佳阈值的下降,该阈值对应的结构相似度则在不断的递增,导致这种数据变化的原因是:在于测试图像的结构信息与标准模板图像的结构信息之间的差异;测试图像的像素点的平均值和各个像素点的数值大小分布。
④ 目标图像阈值分割的最佳阈值计算
选取210幅不同的晴天高速公路场景进行目标图像阈值分割的最佳阈值的计算。其中分割线划分的中间的道路区域块为本文所要提取的道路信息。
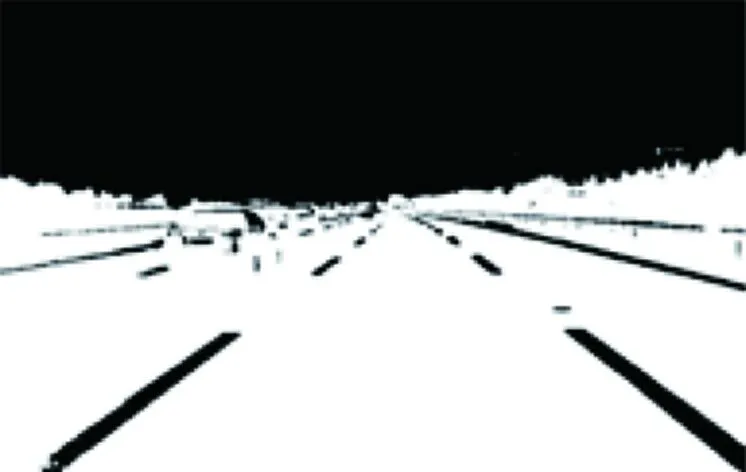
图6所示为目标图像之一,经灰度化预处理后,接着使用建立的模型计算的最佳阈值用于进行阈值分割,分割后的效果图提取其车道线信息如图7(a)所示,以及使用Otsu方法进行的自适应阈值分割后,提取其车道线的信息如图7(b)所示。

图6 选取用于算法计算的测试图
(a) 模型计算的车道线

(b) Otsu算法分割后的道路线
经对比后发现,推导出的最佳阈值计算的公式计算出的最佳阈值用于阈值分割后,在车道线的凸显程度和车道旁边无用信息的滤除程度来看,都明显优于使用Otsu自适应阈值分割方法。210幅目标图像显示出相似效果。这说明在特定场景下,经过训练得到的最佳阈值模型可以有效地自适应获取目标图像用于阈值分割的最佳阈值,并且该方法的阈值计算采用SSIM来直接计算,计算简单,不需要方差的权重分配,节省了运算开支。
3 结束语
针对特定场景下自适应最佳阈值计算的公式推导,本文将该算法分为训练模块和计算模块。经训练模块后得到的自适应计算最佳阈值的公式,在计算模块中对公式进行实验验证其效果。基于鲁棒性和自适应阈值的精确度角度上,建立了用于特定场景下自适应最佳阈值计算的关系模型,并对晴天高速公路场景下的目标图像进行了测试。实验结果表明该方法能够直接有效地获取该场景下的目标图像阈值分割的最佳阈值,通过该阈值的设定,进行阈值分割后,有效地呈现了车道线的信息,很大程度上滤除了路面上的车辆和树木等干扰信息,从而达到自适应得到图像的最佳阈值的目的,且具有更高运算效率,这说明了该方法的鲁棒性和可靠性。
[1] Otsu N.A Thresholds Selection Method form Grey-level Histograms[J].IEEE Transactions on Systems,Man,and Cybernetics,1979,9:62-66.
[2] 范九伦,赵凤.灰度图像的二维 Otsu 曲线阈值分割法[J].电子学报,2007,35(4):751-755.
[3] 赵凤,惠房臣,韩文超.基于过分割的多目标阈值图像分割算法[J].西安邮电大学学报,2015,20(3): 60-64.
[4] 张新明,孙印杰,郑延斌.二维直方图准分的 Otsu 图像分割及其快速实现[J].电子学报,2011,39(8):1778-1784.
[5] 景晓军,李剑峰,刘郁林.一种基于三维最大类间方差的图像分割算法[J].电子学报,2003,31(9):1281-1285.
[6] 徐青,范九伦.新的基于分解直方图的三维 Otsu 分割算法[J].传感器与微系统,2017,36(1):119-122.
[7] 范朝冬,欧阳红林,肖乐意.基于空间截面投影的 Otsu 图像分割算法[J].通信学报,2014,35(5):70-78.
[8] 龚劬,倪麟,唐萍峰,等.基于分解的三维 Otsu 图像分割快速算法[J].计算机应用,2012,32(6):1526-1528.
[9] 朱代辉,林时苗,杨育彬.医学三维影像体数据阈值分割方法[J].计算机科学,2013,40(1):269-272.
[10]周鑫,孙剑峰,姜鹏,等.基于阈值分割方法的复杂场景激光图像目标提取算法研究[J].光学学报,2014,34(B12):149-157.
[11]靳鑫,蒋刚毅,陈芬,等.基于结构相似度的自适应图像质量评价[J].光电子.激光,2014,25(2):378-385.
[12]廖斌,刘利雄.小波域结构相似度图像质量评价[J].北京理工大学学报,2008,28(9):801-805.
[13]蒋刚毅,黄大江,王旭,等.图像质量评价方法研究进展[J].电子与信息学报,2010,32(1):219-226.
[14]张勇,马东玺,闫鹏程,等.面向目标探测视觉任务的灰度夜视融合图像质量客观评价方法[J].光学学报,2013 (B12):75-80.
《无线电通信技术》投稿要求
1. 文章正文双栏排版,文章标题20字以内。
2. 稿件须附摘要(180字左右)和关键词(3~8个,用“;”隔开)
3. 稿件必须包括(按顺序):标题、作者姓名、作者单位、所在省市、邮编、摘要、关键词、中图分类号、正文、参考文献。其中标题、作者姓名、作者单位、摘要和关键词,与中文对应译成英文。
4. 稿件须附作者简介,内容包括:作者姓名、出生年、性别、学历、职称、主要研究方向,并在文章最后给出联系方式(通信地址∕邮编∕电话∕电子邮箱)。
5. 稿件要论点明确,条理清晰,论证有力,文字通顺、简练,数据可靠,量和单位的使用及数字用法要符合国家标准及有关规定。
6.文献序号以文中引用的先后顺序编排。
Study on Lane Extraction Based on Improved Image Adaptive Algorithm
BAO Xiao-min,CHEN Jia-fan,WU Long,LU Wen-tao,YANG Xiao-cheng
(School of Information Science and Technology,Zhejiang Sci-Tech University,Hangzhou Zhejiang 310000,China)
Aiming at the problem of optimal threshold calculation in adaptive image threshold segmentation,this paper puts forward a method of calculating the optimal segmentation threshold based on similarity of image structure. The method is divided into such two parts as model establishment and target image threshold calculation. In modeling,the standard scene template image is selected first,and then the structure similarity is calculated after comparing training image with standard template image. The optimal threshold is determined according to the image quality evaluation standard,and the relationship model of optimal threshold and structure similarity are established in specific scene. In threshold calculation,the structure similarity between target image and standard template image is calculated first,and then the optimal segmentation threshold is calculated directly according to the relation model. To verify this method,the image under the sunny highway scene is selected for test. The experimental results show that the threshold segmentation algorithm is better than the traditional adaptive threshold segmentation algorithm and has higher computational efficiency.
digital image processing; image threshold segmentation; structure contrast; optimal threshold value
2017-05-15
国家自然科学基金项目(61601410);浙江省自然科学基金项目(LY16F010018);浙江省自然科学基金项目(LQ15D060006);浙江省自然科学基金项目(LY16F010017)
包晓敏(1965—),女,教授,硕士生导师,主要研究方向:图像处理。陈家凡(1993—),男,硕士研究生,主要研究方向:图像处理。
10. 3969/j.issn. 1003-3114. 2017.05.19
包晓敏,陈家凡,吴龙,等. 基于改进图像自适应算法的车道线识别研究[J].无线电通信技术,2017,43(5):86-90.
[BAO Xiaomin,CHEN Jiafan,WU Long,et al. Study on Lane Extraction Based on Improved Image Adaptive Algorithm[J].Radio Communications Technology,2017,43(5):86-90.]
TN911.73
A
1003-3114(2017)05-86-5
