结合多源数据的路域精细DEM建模方法
2017-08-11张龙其刘海洋郭云开
张龙其,刘海洋,郭云开,廖 斌
(1. 长沙理工大学交通运输工程学院,湖南 长沙 410004; 2. 贵州省交通规划勘察设计研究院股份有限公司,贵州 贵阳 550008)
结合多源数据的路域精细DEM建模方法
张龙其1,刘海洋1,郭云开1,廖 斌2
(1. 长沙理工大学交通运输工程学院,湖南 长沙 410004; 2. 贵州省交通规划勘察设计研究院股份有限公司,贵州 贵阳 550008)
探讨了道路施工造成的路域DEM变化区域的精细DEM建模方法。该方法首先把二维道路设计成果处理成三维的特征线要素,构建初始TIN;其次应用统计分析的方法内插求出实测点云中各点在初始TIN上的高程和实测高程之间的差异进行统计分析,验证并修改失真的三维特征线要素;然后与选取的少量地面观测点云构建变化区域的DEM,最终实现了路域变化区域精细DEM的构建方法。以杭瑞高速毕都(毕节至都格)段的道路设计成果和局部三维激光扫描数据为例开展了试验研究,研究表明该方法建立的路域DEM精度高、成本低、观测方式灵活,可广泛推广应用。
路域;DEM;增量更新
作为包括我国、日本、美国等多个国家规模化的生产的空间数据基础设施基本产品之一的DEM数据在道路设计、防洪、农业、规划、军事工程、飞行器与战场仿真等领域得到广泛深入的应用,是最为重要的基础地理信息数据之一[1]。改革开放30年来掀起的道路建设高潮[2-3],成为我国路域DEM数据变化更新的主要原因之一。交通部网站发布的交通运输行业发展统计公报显示,2015年全国公路总里程457.73万千米。公路的修建不可避免地要占用和分隔土地,施工过程中的开挖路堑、填筑路堤必然对周围的地形、地貌产生显著影响;大量的挖土填方,引起岩土体移动、变形和破坏,增加了地质脆弱边带边坡的不稳定性。桥梁两端周围的地表也因桥梁的修建或多或少的发生了变化,如要挖掉山体的一部分、修建防护边坡等。道路的建设改变了大量的地形表面,是DEM数据更新的主要原因之一。
路域DEM的构建也引起了广泛的关注,而基于设计成果建模的主要研究如下:蒲浩等探讨了基于设计成果的三维整体建模方法[4-5];贲晓明等应用VBA开发技术基于AutoCAD的电子版道路平面图、纵断面图和横断面图的基础上完成了模型的自动建立[6];潘荣江等从技术实现的角度探讨了一种基于平面设计图的高速公路三维建模方法[7];刘钊等提出了基于顶点删除法简化道路三维地形模型的方法[8]。这些研究成果实现了道路设计的三维建模,但是无法保证模型的现势性。随着测绘技术的发展,车载LiDAR[9-12]、机载LiDAR[13]、地图综合缩编软件更新[14]、无人机搭载双频GPS接收机摄影测量[15]、高分辨率航天遥感[16]、地面激光扫描[10,17]等技术也应用到路域DEM的创建。Yu等应用激光扫描仪、GPS、IMU等技术设计了一个自动获取三维路面模型的系统,其没有考虑原有设计成果的作用[18]。这些方法非常适合大范围的DEM数据生产,针对路域变化区域精细DEM数据生产,DEM数据增量采编技术还有待进一步的发展。
本文基于设计成果资料、遥感影像数据和少量地面三维激光扫描数据,应用数据分析与实地调查结合的方法,探讨基于多源数据的路域精细DEM建模方法。
1 技术路线
本文探讨的路域精细DEM建模方法的技术路线如图1所示。核心就是把二维的设计成果(平面线、纵横断面、特征线)处理成三维特征线和点云数据进行融合处理,建立和原始TIN无缝衔接的路域精细DEM,实现路域DEM数据的增量更新。
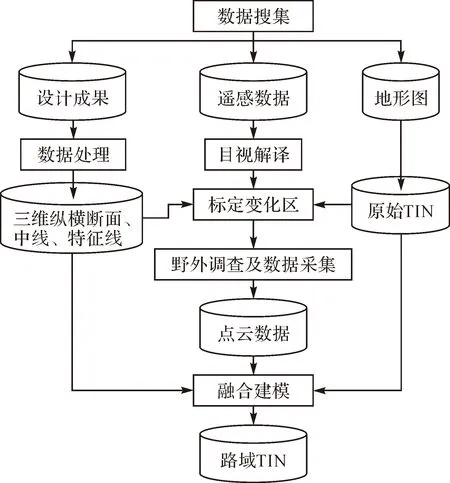
图1 技术路线
与设计成果相比,实测点云数据具有很好的现势性,也有很高的精度;但采样点的密集程度往往超过实际需要,且存在过滤不完全造成的非地面点。因此,融合建模的关键就是根据两者之间的偏差,识别失真的特征线和点云中非地面点;然后修改或删除失真的特征线,并从点云数据中选取设计成果没有涉及区域的少量离散点;最后用修改完善的特征线、变化多边形和选取的少量离散点来创建变化区域TIN。
该方法的关键就是点云数据和特征线之间误差的分析及处理,即如何用点云数据验证特征线是否失真。笔者从点、线和面3个角度构建判断分析特征线是否失真的方法。
(1) 面方法:首先用特征线构建约束的变化区域TIN;然后用TIN内插求出点云中每点坐标(x,y)对应高程,进而计算出和实测高程之差;分别统计分析路面、边坡区域高差值分布情况,按超过2倍中误差为限差得出失真的点云,对应的区域即为失真区域,失真区域内的特征线为失真特征线。
(2) 线方法:线要素可能是面内部,也可能是两面的交线。首先按照位置把特征线划分为:边界、纵断面线、横断面线、变坡线(边坡上坡度变化的线)和隔离带边界线5种类型;然后在每条特征线两侧分别构建0.5 m直角带状范围缓冲区,对缓冲区内点按式(1)内插计算各点高程和原高程的差值。分别统计特征线两侧高差平均值,用表1中的标准判断特征线是否失真
(1)
式中:d1、d2、h1、h12、h分别表示到折线起点和终点的距离、起点高程、起终点之间的高差及点实测高程。
(3) 点方法:首先特征线所有的点(包括折点和端点)转换成点要素;然后,在每个点要素周围0.5 m构建缓冲区,从点云数据中选取缓冲区内的点,并统计分析得出高差平均值、标准差;再根据该特征点高程是否在缓冲区内点云高程平均值的2倍标准差范围内判断该点是否失真,进而判断对应的特征线是否失真。
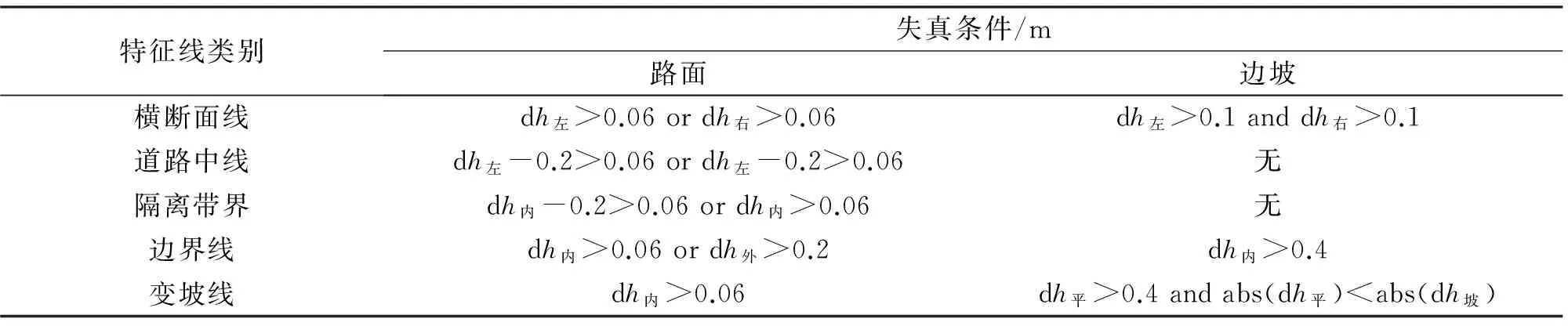
表1 特征线失真条件表
注:dh左、dh右、dh内、dh外、dh平、dh坡分别为特征线左右两侧、靠近路面一侧或另一侧、平坡或斜坡一侧缓冲区内点高差平均值。
修改失真区域内的特征线数据,手工选取对应的点云数据作为特征点,和修改后的特征线一起重建TIN;重复上述步骤,直至失真区域完全消失为止。
2 试验分析
为了验证方法的可行性,本文将杭瑞高速毕都(毕节至都格)段(K167+400-K168+400)与307省道交汇处约1 km的路段作为试验区开展试验研究。本项目收集到二维的CAD格式的带状地形图、道路中线、横断面、纵断面线、特征线及TIFF格式的正射影像数据等。针对纵断面线、道路中线、横断面线处理、特征线进行的处理工作依次为格式转换、数据选取、编辑修改、坐标变换,生成了具有统一地理坐标的三维SHP格式数据(如图2所示)。然后,用边坡外边界、道路外边界、桥路分界线组成的封闭区域作为变化区域,并应用ArcGIS的“创建TIN”功能生成了变化区域的TIN。
在野外,用徕卡C5三维激光扫描仪对试验区路段进行扫描观测,共采集10 GB左右的点云数据和照片。应用Cyclone完成测站拼接、地理配准、数据过滤等操作生成统一地理坐标的三维点云数据,并依据位置依次分割成路面、边坡和桥两端底部区域3个点云文件。

图2 特征线处理结果及边坡点云分布
应用ArcGIS内插计算出点云中各点在变化区域的TIN中的高程,并计算出和实测高程的差异,路面和边坡部分的差异统计分析结果如图3所示,统计结果见表2。依据标准发现了一处明显失真的边坡(如图4(a)所示),重新修改横断面线,使点云数据和横断面基本吻合(如图4(b)所示)。最后,以修改后的三维线要素及选取的部分点云数据重新构建的TIN模型如图5所示。采用同样的差值统计方法分析得出建模后路面和边坡部分点云高程中误差分别为0.03 m和0.2 m。
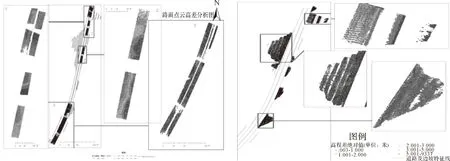
图3 高差统计分析结果
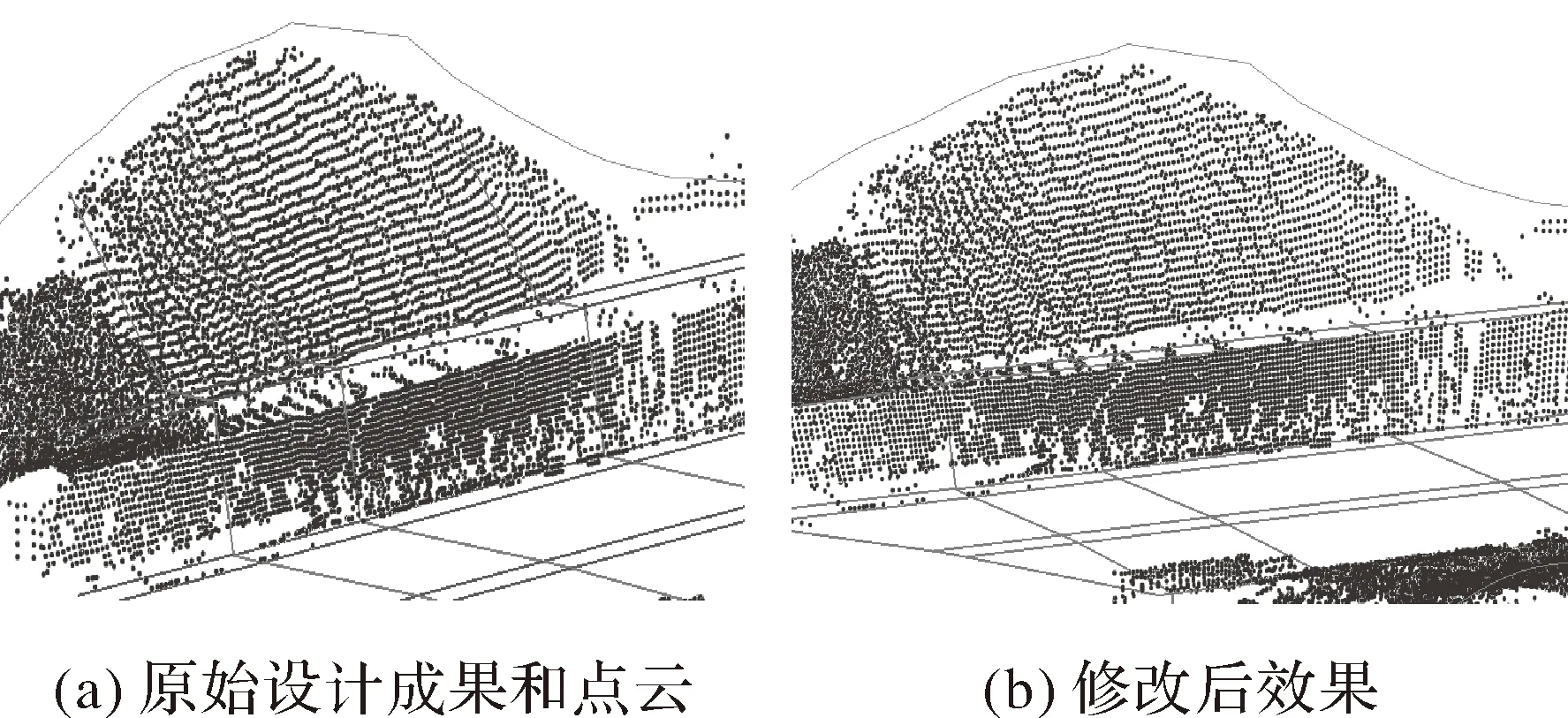
图4 边坡特征线失真
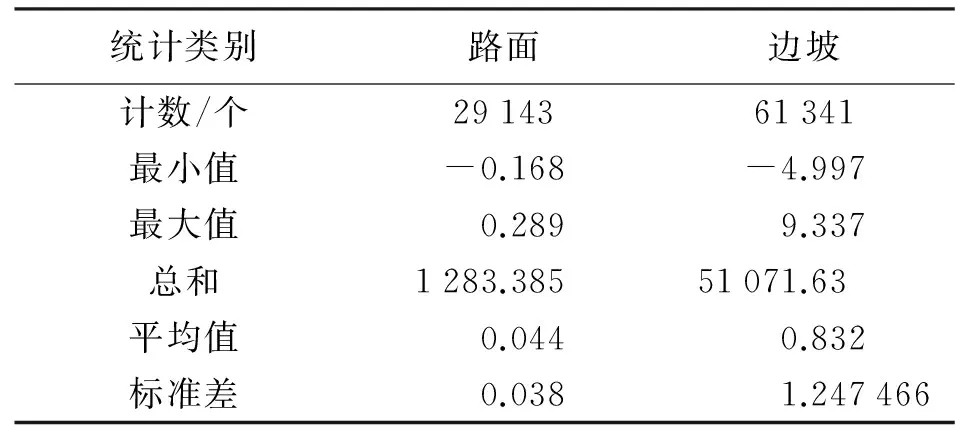
表2 误差统计分析表 m
3 结果及讨论
试验结果表明,三维扫面点云在路面区域与设计成果吻合较好,高差标准差为0.038 m,满足当前任何比例尺DEM的精度要求。从空间分布格局上看,误差分布具有如下特点:①误差较大的点往往成片出现,这可能是在路面施工过程中出于某种原因导致的设计变更或建成后的局部维修造成的;②一般情况下道路中间部分的高差的小于道路边缘部分;③误差大于0.2 m的零星点,对照观测结果分析得知一般为扫描时过往车辆、护栏、植被等非路面特征点,为点云过滤不完全所致。可以得出:应用基于设计成果处理完成的特征线构建厘米级的三维路面模型是可行的,该结果可适用于点云数据中非路面点的过滤。
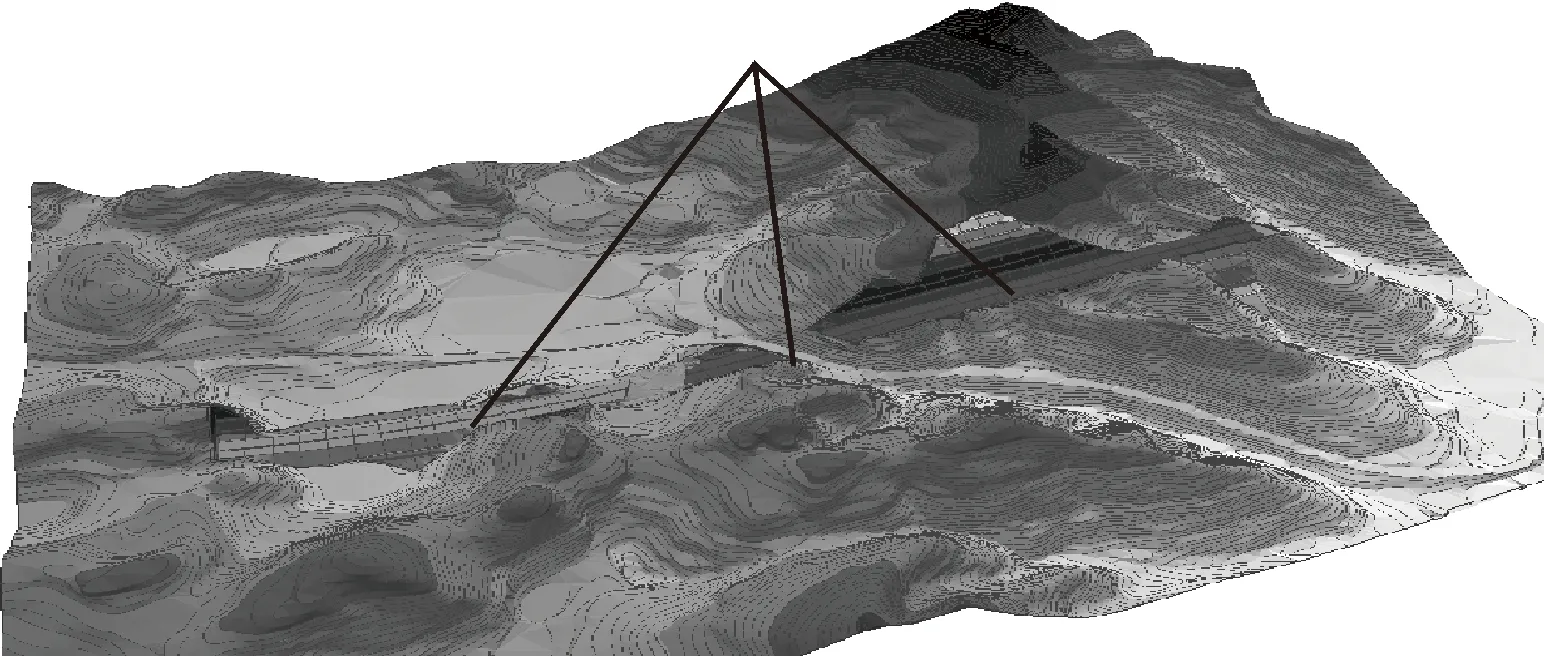
图5 建模效果
边坡区域扫描点云与设计成果相差较大,设计成果基本上不能满足地面精细建模的需要。进一步的分析得出:①实测点云高程一般高于设计高程,负值偏差值所占比例不到总数的1/5;②偏差较大的点成片出现,且越偏离道路偏差越大;③边坡内部存在部分零星的较高偏差值。经现场调查分析,这主要是以下原因造成的:①大部分边坡植被茂盛,扫描点云无法观测真实地面点,实测高程往往高于设计成果,建模过程中无须修改特征线;②在边坡边缘地方构建三角网存在不合理的因素,在建模过程中要考虑边界因素;③边坡内部零星的较高偏差值一般为零星植被造成的,建模过程中无须修改特征线;④实测高程明显低于设计高程的区域,边坡特征线失真可能性较大(如图5所示),且往往是成片区域的改变,这时就需要修改特征线。综合分析得出:①在边坡区域精细建模时需要综合考虑植被、边缘地带、修改设计等多种因素,实测点云一般不宜用来建模;②该方法有助于快速发现与设计成果较大差异的区域,可用于数据融合建模;③该方法有助于发现严重偏差的离散点,即粗差点。本次发现1927个粗差点,对相应点手动删除,可以有效改善点云过滤的效果。此外,在变化区域内部存在设计成果未涉及的区域(如桥两端底部区域)必须全部采用野外观测的数据建模。
4 结论及展望
将设计成果处理为三维的特征线,并据此构建路域DEM是可行的,能够满足大多数建模精度需要,但建立的模型不能反映设计变更、边坡滑坡及治理等造成的偏差,也不能完全覆盖所有变化区域。借助现场对边坡、桥两端进行少量的三维激光扫描观测点云和设计成果交叉验证的融合建模方法充分利用原有设计成果资料,以最小的地面三维激光观测保证了模型的现势性,达到当前车载和机载激光雷达观测的效果,极大地节约了路域DEM的建模成本,可在路域DEM数据生产方面广泛推广。此外,该方法有利于将设计成果和全面三维点云融合,提高基于点云的路域环境三维建模的效率。本文探讨的方法在自动化方面还有待进一步的发展。
[1] 胡鹏, 杨传勇, 吴艳兰. 新数字高程模型理论、方法、标准和应用[M]. 北京: 测绘出版社, 2009.
[2] WANG C, DING J, YANG W. Policy and Spatial Effect of Expressway Planning Network in China[J]. Acta Geographica Sinica,2011, 66(8): 1076-1088.
[3] HIRPA D, HARE W, LUCET Y, et al. A Bi-objective Optimization Framework for Three-dimensional Road Alignment Design[J]. Transportation Research Part C: Emerging Technologies,2016, 65: 61-78.
[4] 詹振炎, 蒲浩, 宋占峰. 道路路线三维整体建模方法研究[J]. 湖南科技大学学报(自然科学版),2005(1): 33-36.
[5] 蒲浩, 李伟, 赵海峰, 等. 顾及约束的网络道路三维模型简化方法[J]. 中南大学学报(自然科学版),2013, 44(4): 1517-1524.
[6] 贲晓明, 刘尧, 李杰, 等. 从平面图和横断面图建立三维道路模型[J]. 华中科技大学学报(城市科学版),2005, 22(S1): 156-158.
[7] 潘荣江, 高孝洋, 关防利, 等. 基于平面设计图的高速公路三维建模[J]. 系统仿真学报,2012, 24(1): 19-21.
[8] 刘钊, 张涛, 施洪刚, 等. 利用顶点删除法简化道路三维地形模型[J]. 测绘通报,2014(8): 62-64.
[9] 杨必胜, 方莉娜. 车载激光扫描数据的结构化道路自动提取方法[J]. 测绘学报,2013,42(2): 260-267.
[10] GUO J, TSAI M, HAN J. Automatic Reconstruction of Road Surface Features by Using Terrestrial Mobile Lidar[J]. Automation in Construction,2015, 58: 165-175.
[11] YANG B, FANG L, LI J. Semi-automated Extraction and Delineation of 3D Roads of Street Scene from Mobile Laser Scanning Point Clouds[J]. 2013, 79: 80-93.
[12] 马浩, 王留召. 基于车载激光点云的道路边线自动分类与提取[J]. 测绘科学,2014, 39(6): 126-128.
[13] 王通, 郭华东, 梁菲, 等. 基于机载InSAR生成DEM技术研究试验[J]. 微计算机信息,2012(3): 158-159.
[14] ZHOU Q, CHEN Y. Generalization of DEM for Terrain Analysis Using a Compound Method[J]. ISPRS Journal of Photogrammetry and Remote Sensing,2011, 66(1): 38-45.
[15] 王薇, 王艳梅, 李楠, 等. 基于无人机航测的DEM数据生产及编辑[J]. 物探装备,2014, 24(5): 330-336.
[16] 李德仁, 李卉, 钟成, 等. 基于LiDAR和RS影像的道路三维模型重建研究进展[J]. 测绘信息与工程,2010, 35(1): 30-32.
[17] ZHANG W, WANG W, CHEN L. Constructing DEM Based on InSAR and the Relationship between InSAR DEM’s Precision and Terrain Factors[J]. Energy Procedia,2012, 16, Part A(0): 184-189.
[18] YU S, SUKUMAR S R, KOSCHAN A F, et al. 3D Reconstruction of Road Surfaces Using an Integrated Multi-sensory Approach[J]. Optics and Lasers in Engineering,2007, 45(7): 808-818.
The Methodology on Building High-fidelity DEM in Road Domain Based on Multi-source Data
ZHANG Longqi1,LIU Haiyang1,GUO Yunkai1,LIAO Bin2
(1. Traffic and Transportation Engineering School, Changsha University of Science and Technology, Changsha 410004, China; 2. Guizhou Transportation Planning Survey & Design Acadame Co. Ltd., Guiyang 550008, China)
The road construction climax of reform and opening up 30 years has become one of the main reasons for the updating of DEM data in road domain. The paper discussed a methodology building high-resolution DEM based on the road design results, remote sensing image data before and after construction from google earth, terrestrial laser scanning point cloud. The demonstration was made based on the data of about 1 kilometer road in Bijie-Douge section of Hangzhou-Ruili expressway. The results showed that it was a feasible, fast and precise method based on the road design results in the road surface and side slope. The research showed that the method had the advantages of high precision, low cost and flexible observation mode, and can be widely used.
road domain; DEM; incremental update
张龙其,刘海洋,郭云开,等.结合多源数据的路域精细DEM建模方法[J].测绘通报,2017(7):113-116.
10.13474/j.cnki.11-2246.2017.0235.
2017-03-06;
2017-05-17
贵州省交通运输厅科技计划(2015-121-022);湖南省科技厅重点研发计划(2016SK2023)
张龙其(1977—),男,博士,讲师,主要从事GIS应用及开发方面的研究工作。E-mail: zhanglongqi@csust.edu.cn
P208
A
0494-0911(2017)07-0113-04
