基于ARM的多传感器四旋翼飞行器控制系统设计*
2017-08-09高进可
王 丙, 王 琪, 张 震, 高进可
(1.江苏科技大学 张家港校区 机电与汽车工程学院,江苏 张家港 215600;2.江苏科技大学 苏州理工学院 机电与动力工程学院,江苏 张家港 215600)
基于ARM的多传感器四旋翼飞行器控制系统设计*
王 丙1, 王 琪1, 张 震1, 高进可2
(1.江苏科技大学 张家港校区 机电与汽车工程学院,江苏 张家港 215600;2.江苏科技大学 苏州理工学院 机电与动力工程学院,江苏 张家港 215600)
为改变以传统嵌入式处理器的四翼飞行器的控制方式,基于四旋翼飞行器的工作原理和性能特点,提出了一种基于ARM Cortex—M7的嵌入式处理器的飞行控制系统的设计和实现方案。阐述了四旋翼飞行器的物理结构与飞行原理,给出了硬件系统总体方案;在整合各功能模块的基础上,对系统硬件电路进行设计,并进行了模拟仿真运行和实验验证。仿真与实验表明:设计能够保证系统的高稳定性,能满足飞行器起飞、悬停、侧飞等飞行模态的控制要求。
ARM; 多传感器; 四翼飞行器; 控制系统硬件电路设计
0 引 言
近年来,随着传感器技术、数字图像处理技术、信号与系统处理技术的迅速发展,以及各种新材料、新能源的广泛应用,国内的小型飞行器的研究开发工作逐渐升温,许多形成了产业[1,2]。但国内研究方向的重点主要分为3个方面:姿态控制、传感器技术发展以及新材料的应用、电池领域技术的研究[3]。在控制算法上,卡尔曼滤波算法、神经网络控制算法等得到广泛应用。
四旋翼飞行器具有线性度差、耦合性强等特点,需要通过无刷电调来控制4个无刷电机实现由4个输入量,6个自由度的欠驱动系统的平衡控制,同时这也使得飞行器控制系统的设计比较困难[4]。传统的飞行器飞行控制系统采用Cortex—M0,Cortex—M3以及Cortex—M4等微处理器作为主控计算机,存在硬件资源有限,运算和处理速度相对较慢等问题。
本文设计控制系统选用ARM Cortex—M7处理器,和传统的控制方式相比,浮点单元(SFPU)精度更高,处理速度极快。本文基于ARM Cortex—M7的多传感器硬件控制系统,经过实验调试,四旋翼飞行器的处理速度及控制精度都显著提高。
1 物理结构与飞行原理
四旋翼飞行器采用如图1所示的机械结构进行设计,由1个支架和4个螺旋桨组成,支架中间放置有飞行控制板以及各种外设,4个螺旋桨几何尺寸和角度相同,呈左、右、前、后4个方向两两对称排列。4个电机对称安装在支架端部,其中电机1和电机3逆时针旋转,电机2和电机4顺时针旋转,此时飞行器的陀螺效应和空气扭矩效应相互作用而彼此抵消,从而保证四旋翼飞行器能够平衡稳定地飞行[5]。本文采用的四旋翼飞行器旋翼的旋转切角是固定值,因此,要通过调节每个电机的转速来实现六自由度的飞行姿态控制。增加或减少4个电机的转速来完成垂直方向上的升降运动,调节1,3旋翼的转速差来控制仰俯速率和进退运动,调节2,4旋翼的转速差来控制横滚速率和倾飞运动,调节2个顺时针旋转电机和2个逆时针旋转电机的相对速率来控制偏航运动。

图1 四旋翼飞行器结构示意
2 飞行器控制系统总体系统设计
控制系统是一个多输入多输出的系统,控制部分的模块主要的输入信号有各个传感器的信号输入,输出信号主要为四路可变脉宽的控制电机信号,同时还需要多个定时/计数器控制信号的脉宽。由于控制系统需要处理多个传感器回传的数据,同时还要实时控制4个电机的转速来达到系统的平衡。这就要求控制系统的响应速度必须快,因此,本飞行器微处理器模块选用ARM Cortex—M7内核的STM32F756IGT56的32位RISC的MCU,时钟频率最高可达到216 MHz,有单SFPU精度,支持多ARM单精度处理指令,并且拥有I2C总线接口、SPI接口、AD采集接口、多路PWM输出、多个串口以及JTAG下载。飞行控制器硬件结构图如图2。

图2 飞行控制器总体硬件结构框图
3 电源模块
四旋翼飞行器由2 200 MAh,11.1 V,持续放电倍率30 C锂电池供电,通过DC/DC转换器模块的设计可输出5 V与3.3 V的电压对不同电路进行供电,确保各模块正常稳定的工作。整个电路采用一阶低带通滤波。前一级采用LM2941稳压模块,其最大承受电流可达3 A,功率最大可达45 W,后一级采用线性稳压模块,输出电压的波纹更小,电压更加稳定。实验证明,设计方案满足控制系统要求。具体DC/DC转换电路如图3。
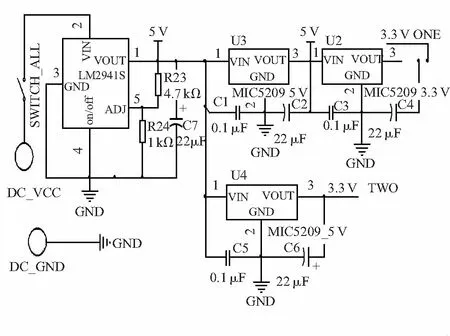
图3 稳压电源电路
4 多传感器测量模块
四旋翼飞行器受外界噪声的干扰影响较大,精确地建立数学模型相对困难。为了准确地控制四旋翼飞行器的飞行姿态和位置,需要在控制系统中加入多只不同种类的传感器。为了准确控制飞行器的飞行高度,设计大气压传感器测量大气压力的大小来计算飞行器的飞行高度;为了稳定控制飞行器的飞行姿态,设计加速度传感器与陀螺仪来测量3轴加速度与角速度。多传感器回传的数据为自主导航功能提供了极为有效的支撑。
4.1 气压传感器
飞思卡尔Xtrinsic MPL3115A2压力传感器基于微机电系统(MEMS)技术,新增了加速计和磁力计,相比传统的气压传感器,可提供更为精确的压力和海拔高度数据,具有采样频率可调的能力。其功耗非常低,具有数字输出、自主数据采集等功能特点,测压范围为20~1 100 kPa,具有灵活的采样率,最高达128 Hz,工作温度范围为-40~+85 ℃,能很好地满足四旋翼飞行器的高度控制。MPL3115A2具体应用电路如图4。
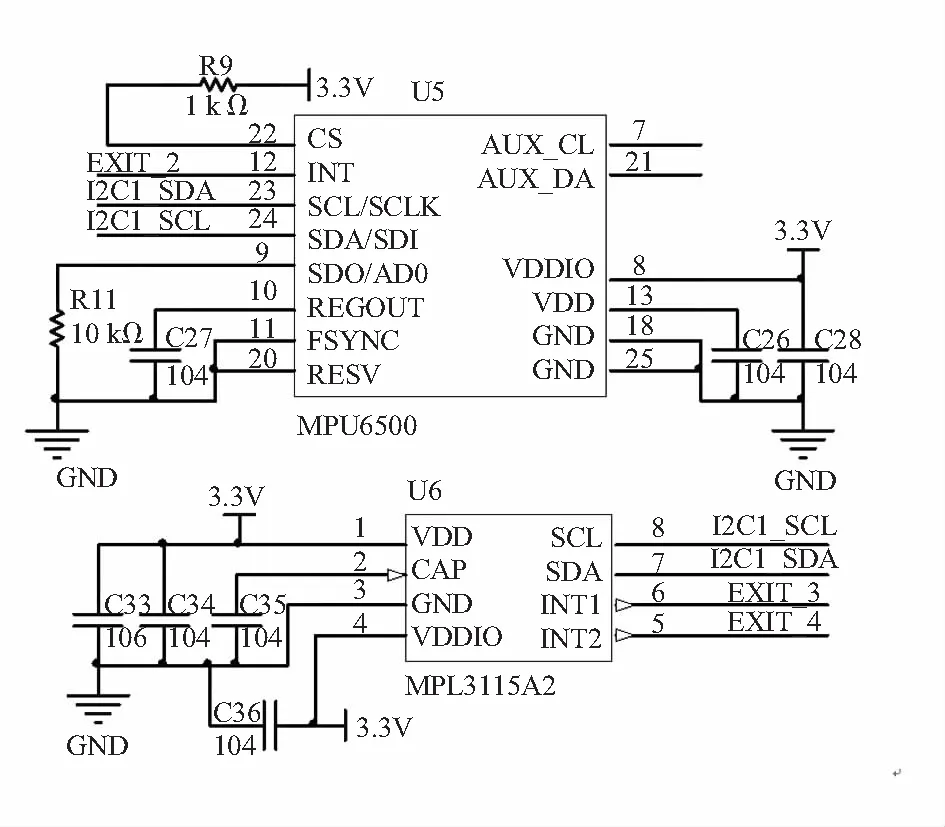
图4 大气压力传感器和陀螺仪应用电路
4.2 加速度传感器
MMA7361 是一种功耗低、精度高、稳定性好的3轴加速度传感器,通过模拟输出为外部电路提供直接测量信号,其工作电压为 3.3~8 V。工作模式下电流为400 μA,休眠模式下为3 μA。灵敏度很高,在1.5gn量程下为800 mV/gn,可以准确地测量飞行器的加速度数据。这个芯片的X-OUT,Y-OUT,Z-OUT是3轴数据的模拟输出,因此,AD应该采集的就是这4个管脚的电压值,除了这3个模拟输出以及电源和地之外还有SL,OG,ST,GS这4个管脚,其中,SL用来切换睡眠模式和正常模式,该管脚置1为正常模式,ST为Self-test,该ST管脚 置1用来初始化芯片,GS管脚为模式选择位,该位置0为1.5gn的模式,置1为6gn的模式,OG管脚为输出,当每个轴都是0gn时这个管脚会输出1,一般用这个管脚来判断自由落体运动。加速度传感器应用电路如图5所示。
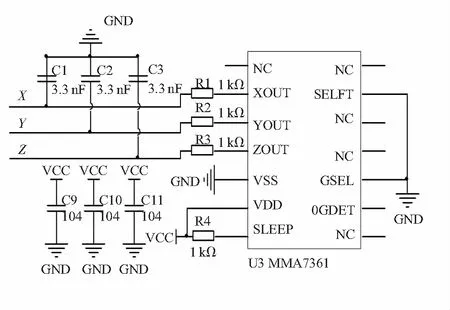
图5 加速度传感器应用电路
4.3 陀螺仪(3轴角速度传感器)
本系统采用MPU—6500作为飞行器的姿态传感器。陀螺仪起到测量飞行器角速度的作用,在惯性导航系统中非常重要。MPU—6500通过其I2C协议接口连接进行通信,其高达400 kHz快速模式的I2C可以满足四旋翼飞行器的数据传输。只需要将MPU—6500的SDA数据线和SCL时钟线与STM32F756IGT56的通用I/O口相连接即可,具体应用电路如图4,其中,C27为标准的旁路滤波电容器,C26,C28为供电电压滤波电容器。MPU—6500可以精确跟踪快速和慢速的运动,能很好地满足飞行器运动姿态的测量。另外,MPU—6500还内嵌了一个温度传感器和在工作环境下仅有±1 %变动的振荡器,稳定性极高。 MPU—6500 陀螺仪安装于垂直于飞行器机体坐标系的Z轴来实现系统3轴角速度的测量。
5 无线通信模块
无线通信模块实现对四旋翼飞行器的飞行控制和跟踪定位,与地面控制系统实时交换信息,接收地面控制系统发送的飞行控制指令、发送给地面控制系统当前四轴飞行器的飞行数据和姿态数据等信息,以完成指定的飞行任务。
研究中应用Nordic公司出品的单芯片无线收发芯片NRF2401,通信距离可达500 m,工作频率在2.4~2.5 GHz,相比传统的通信工具,具有极低的电流消耗,在-5 dBm的输出功率时仅为10.5 mA,在接收模式仅为18 mA。NRF2401还具有多通道工作模式,125个数据通道,通道切换时间≤200 μs,满足多点通信和调频需要,使飞行器与地面通信更加迅速。ARM通过SPI端口与NRF2401通信,SPI通信端口适合与各种MCU连接,编程简单。无线通信模块电路图如图6。

图6 无线通信模块电路
系统针对无线传输模块做了稳定性测试,通过测试连通性、传输距离和误码率,确定无线通信模块的性能特性。测试时把遥控器设置成为发送信号模式,地面站负责接收,通过地面站来显示接收信号的次数,记录地面站显示的接收信号变量的值来评估无线传输特性的质量。测试的地点选在了学校的实验室以及空旷的操场上,用电机的转动或停止判断通信的成功与否。该飞行控制系统进行了80次实验测试。详细的记录见表1。

表1 测量不同环境下通信距离的数据
结果分析:无线通信模块在20 m以后进行通信时,信号传输次数明显下降。主要原因是无线通信的功率造成的。表明,低功耗无线通信模块在设计的需求范围内能够有效地工作。
6 低压报警电路
为使飞行器更加地安全飞行,不致于在电量不足的情况下造成损伤。控制系统中设计了低压报警电路,通过STM32的ADC端口对电池电压进行实时地采集并记录,引入SOC理论,当SOC低于某个下限时,驱动报警装置报警,同时给地面站发送报警信号,示意飞行器此时就地降落或自动返航。经过试验,能够很好满足本飞行器的设计要求。SOC估算应用电路如图7。
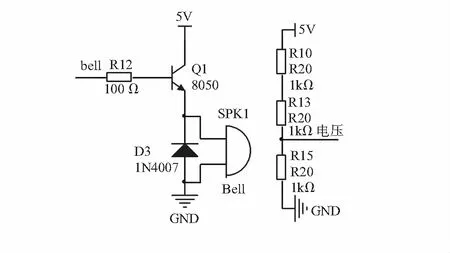
图7 低压报警电路
7 实验与仿真
四旋翼飞行器在姿态解算时,陀螺仪分别检测Roll(左右倾斜)、Pitch(前后倾斜)、Yaw(左右摇摆)全方位动态角速度信息。在对陀螺仪采集的角速度进行积分的过程中,会不断累积积分误差。积分误差产生的原因主要有两方面:积分时间和由于自身的机械特性而产生零漂温漂等现象。
由于陀螺仪的温漂特性以及加速度计易受噪声干扰的影响,将陀螺仪与加速度传感器组合使用,不但对零点漂移进行了补偿,而且对温漂、积分误差有明显地抑制作用。而且使加速度传感器良好的静态性能与陀螺仪良好的动态性能相结合[6,7],能够有效地抵抗外界干扰的影响。数据经卡尔曼滤波算法处理后,有效地降低了数据噪声的影响。
图8为飞行器实际飞行3个轴的数值经上位机输出的曲线比较,经过PID调节控制之后可以看出飞行器的飞行姿态稳定性明显增强,扰动变小。

图8 三轴实际飞行姿态角数据
8 结 论
控制系统以ARM架构的STM32F756IGT56为处理器,以MPU—6500和MMA—7361作为飞行器的姿态传感器,以超低功耗2.4GHz的NRF2401作为无线通信器件,以MPL3115A2作为大气压力传感器实时监测飞行系统的高度,并设计了低压报警电路使整个系统硬件电路的安全性大大提高。在加速度传感器与陀螺仪的融合使用过程中,通过卡尔曼滤波算法对数据进行处理,有效地抑制了在硬件电路设计中无法避免的零漂、温漂、噪声等干扰因素。实验调试表明:本研究中基于ARM Cortex—M7的硬件控制系统能够稳定、可靠地运行。
[1] 张 鹏,程 飞,曹宇强,等.一种新型四轴搜救飞行器设计[J].科技广场,2010(9):145-147.
[2] 于雅莉,孙 枫,王元昔.基于多传感器的四旋翼飞行器硬件电路设计[J].传感器与微系统,2011,30(8):113-115,123.
[3] 李运堂,贾宇宁,王鹏峰,等.基于多传感器的四旋翼飞行器硬件系统设计[J].传感器与微系统,2015,34(2):119-121,142.
[4] Salih A L,Moghavvemi M.Modelling and PID controller design for a quadrotor unmannedair vehicle[J].Automation Quality and Testin Robotics(AQTR),IEEE,2010,1:1-5.
[5] Lotters J C,Schipper J,Veltink P H,et al.Procedure for in-usecalibration of triaxial accelerometer in medical applications[J].Sensors and Actuators A,1998,68:221-228.
[6] 王史春.四旋翼飞行器力学模型与控制系统设计[J].中北大学学报,2014,35(2):218-223.
[7] 李 俊,李运堂.四旋翼飞行器的动力学建模及PID控制[J].辽宁工程技术大学学报:自然科学版,2012,31(4):114-117.
Design of control system for multi-sensor quadrotor based on ARM*
WANG Bing1, WANG Qi1, ZHANG Zhen1, GAO Jin-ke2
(1.School of Mechatronic and Automobile Engineering,Jiangsu University of Science and Technology at Zhangjiagang,Zhangjiagang 215600,China;2.School of Mechatronic and Power Engineering,Suzhou Institute of Technology,Zhangjiagang 215600,China)
In order to change the conventional control mode of quadrotor with embedded processor,a solution of flight control system is presented based on working principle and performances of quadrotor,design of flight control system based on embedded ARM Cortex—M7 is proposed.Flight principles and mechanical structures of quadrotors are presented, as well as general scheme of hardware system.On the basis of integration of each function module,hardware circuit design of multi-sensor control system based on ARM Cortex—M7 is discussed in detail.Simulation operation and experimental verification are carried out.Simulation and experimental results show that high stability of the control system is guaranteed and the requirements of flight modes are satisfied,including aircraft taking off,hovering,flying side and so on.
ARM; multi-sensor; quadrotor; hardware circuit design of control system
10.13873/J.1000—9787(2017)07—0120—04
2016—07—11
2015江苏省高等学校大学生创新创业训练计划资助项目(201510289078X)
TP 202
B
1000—9787(2017)07—0120—04
王 丙(1992-),男,研究方向为汽车电子技术。
王 琪(1962-),男,教授, 从事CAD/CAE/CAM,车辆工程/特种车辆设计与制造技术方向研究工作。
