改进的二维Otsu算法在SF6压力表盘图像分割中的研究*
2017-08-09张长胜刘子裕
张长胜, 冯 广, 刘子裕, 李 川, 钱 斌
(1.昆明理工大学 信息工程与自动化学院,云南 昆明 650500;2.中国能源建设集团 云南省电力设计院有限公司,云南 昆明 650051)
改进的二维Otsu算法在SF6压力表盘图像分割中的研究*
张长胜1, 冯 广1, 刘子裕2, 李 川1, 钱 斌1
(1.昆明理工大学 信息工程与自动化学院,云南 昆明 650500;2.中国能源建设集团 云南省电力设计院有限公司,云南 昆明 650051)
为了提高SF6压力表盘图像分割准确度,对比了传统二维Otsu和Otsu双阈值分割算法,给出了一种改进二维Otsu算法。针对二维Otsu算法选取最佳阈值时存在的缺陷,将整体阈值再区分并结合离差平方和作为适应度函数选取最佳阈值,提高了目标图像的阈值分割效果。实验结果表明:所提算法不仅满足对SF6压力表盘图像进行目标区域分割,同时具有更高的稳定性、快速性和分割精度。
SF6压力表盘; 图像分割; 最佳阈值; 适应度函数; 改进二维Otsu算法
0 引 言
SF6压力表盘是变电站主设备之一,起着控制和保护系统的双重作用,但其气体泄漏不仅降低压力的绝缘强度,还易造成空气污染,所以对气体泄漏引起的压力、密度下降及变化趋势的监测至关重要。传统人工监测模式具有较强主观性,且效率低,无法实时监测表盘指针读数,故研发代替人工方式识别SF6压力表盘指针读数的智能遥视系统成为重点。而SF6压力表盘图像分割是智能遥视系统处理过程的重要步骤,保证了后期图像特征提取和刻度识别的精确度。针对图像分割领域的研究,国内外学者提出了很多有效的图像分割算法,如直方图分割[1]、k-Means和SVM结合的图像分割[2]、基于Mean Shift的芯片X光图像层次分割[3]、Tsallis熵参数图像阈值分割[4]、基于最大累积剩余熵的红外图像分割[5]、改进差分进化的二维最大熵图像分割[6]等算法,均具有较好分割效果。传统二维Otsu图像分割算法能更好地将待处理图像的目标区域像素从含背景区域图像中分离出来,但易造成目标与背景信息部分缺失,影响表盘图像分割效果,且具有计算量大、计算时间长等缺点。因此,寻求一种好的图像分割算法对SF6压力表盘图像分割具有重要价值。
陈英针对Brodatz纹理库图像采用基于向量机和灰度共生矩阵方法进行纹理图像分割,结果表明该方法具有较好的分割效果[7]。陈修桥根据图像二维直方图中目标和背景分布的最大相关量来选择阈值,将遗传算法用于对二维最大相关准则阈值分割的优化,结果表明该算法的图像分割效果较好,且比传统最大相关准则具有更强抗噪声能力[8]。林正春研究了最优进化图像阈值分割算法,重新定义适值函数和选择机制并结合适当的交叉率和变异率得到最优阈值,实验表明该算法稳定性高[9]。吴一全研究了二维直方图区域斜分阈值分割及快速递推算法,通过4条平行斜线将直方图分成内点区、边界点区和噪声点区,并采用与主对角线垂直的斜线进行阈值分割,结果表明,该方法可以应用于所有基于二维直方图的阈值分割,且具有边界准确、抗噪稳定和运行时间少等优点[10]。
本文基于SF6压力表盘图像对比了传统二维Otsu和Otsu双阈值,给出了一种改进的二维Otsu算法。算法将整体阈值再区分并结合离差平方和作为适应度函数选取最佳阈值,不仅满足对图像进行目标区域分割,同时具有更高的稳定性、快速性和分割精度。
1 传统二维Otsu阈值分割
传统二维Otsu算法针对目标类和背景类分离计算,当阈值(s,t)使最大类间方差取最大值时,则该阈值组合为Otsu算法的最优阈值[11]。其理论如下所述:
假设图像f(x,y)灰度级为L(0,1,...,L-1),其邻域平滑图像g(x,y)的灰度级为L,则图像每个像素点数fij的像素灰度值i和邻域平均灰度值j即为二元组,图像总像素数为M,二维联合概率密度[12]为
(1)
任意给定阈值(s ,t),将图像分割成4个区域,则二维Otsu阈值分区如图1所示。
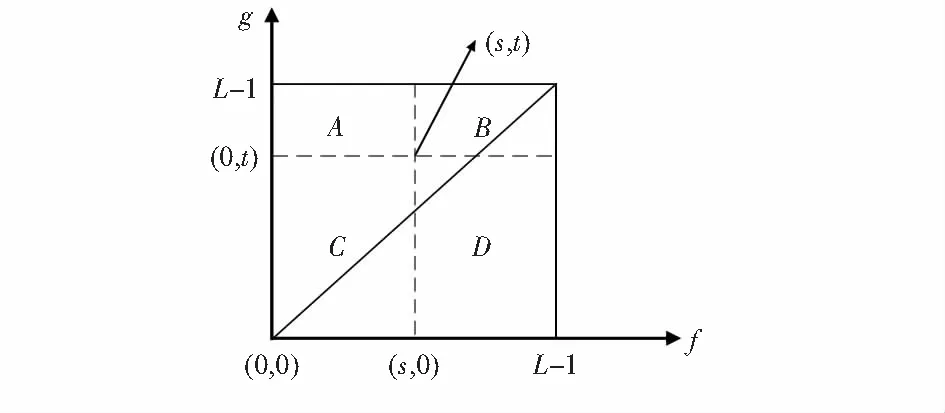
图1 二维Otsu阈值分区
其中,对角线上的区域B和C分别对应于目标和背景,而远离对角线的区域A和D对应边缘和噪声,s和t分别为灰度分割和邻域灰度均值分割阈值。Otsu算法的直方图分布如图2所示。
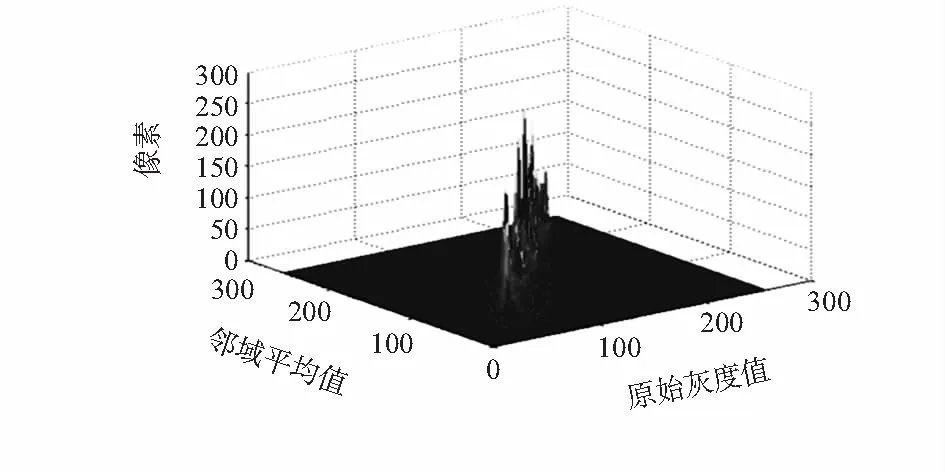
图2 Otsu直方图分布
设背景和目标分别为C0和C1,其概率P0和P1为
(2)
目标类和背景类对应的均值矢量μ0和μ1为
(3)
二维Otsu直方图的均值矢量μt为
(4)
通常远离对角线的概率较小可忽略,即假设图1中区域A和D的概率为零,则可证明
(5)
则类间离散矩阵Sb为
(6)
离散矩阵的迹rtrace(Sb)为
rtrace(Sb)=P0[(μ0i-μti)2+(μ0j-μtj)2]+P1[(μ1i-μti)2+(μ1j-μtj)2]
(7)
因此,最佳阈值为rtrace(Sb)取最大值时对应的(s,t)。但其只考虑类间的相似度,而忽略了类内聚合性,结论必然存在缺陷,影响图像分割效果且计算量大。
2 二维Otsu双阈值
在图像灰度直方图中设定合理的分割阈值,该阈值作为区分目标与背景的界限,若分割后满足目标与背景类的类间方差最大,且类内方差最小,则该阈值为最佳分割阈值。具体过程如下:
设待处理图像有L个灰度级,目标区域A和背景区域B由阈值t区分,Pi为图像中灰度级为i的像素出现概率
(8)
式中PA和PB分别为目标区域和背景区域像素概率和
(9)

(10)
因此,为满足最大类间方差和最小类间方差需求,给出下列计算式
(11)
当F取得最大值时对应的阈值t为最佳阈值点。为了解决因目标区域与背景区域的灰度差值小而产生目标分割效果不佳等问题,加入了加权双阈值t1和t2,权值系数为k1和k2,即
(12)
改进的Otsu算法可以通过调节权值参数改变分割效果,减少了目标细节在分割中遗失的情况发生[13]。
3 改进二维Otsu算法
根据传统二维Otsu直方图分布可知,大部分像素分布于二维直方图对角线附近,因此,区域B和区域C中像素点的个数最多,而区域A和区域D像素分布较少,通常,计算时忽略,但部分区域也包含目标和背景类的像素点,若忽略必定造成目标与背景信息缺失,影响分割效果,若将所有像素点纳入计算,又会导致计算量大,计算时间长等缺点。快速Otsu算法将传统二维直方图分块处理,对f=g-N和f=g+N窄带区域的像素点进行分割运算,且略去其他像素区域,N取值变大使窄带区域增加,所有像素点能被包含在窄带区域。

图3 快速Otsu算法阈值分区
设分割阈值为(s,t),不以‘A’,‘B’,‘C’,‘D’进行分割,而以通过点(s,t)且与对角线垂直的直线来进行分割。该直线左面的点对应于C0目标类,右边点对应于C1背景类。其辅助直线方程为
f=s+t-g
(13)
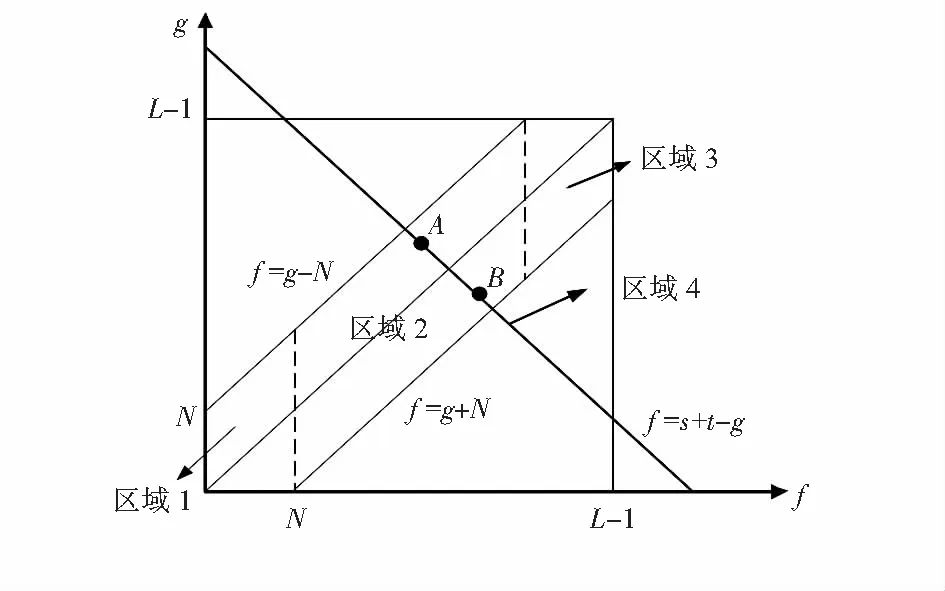
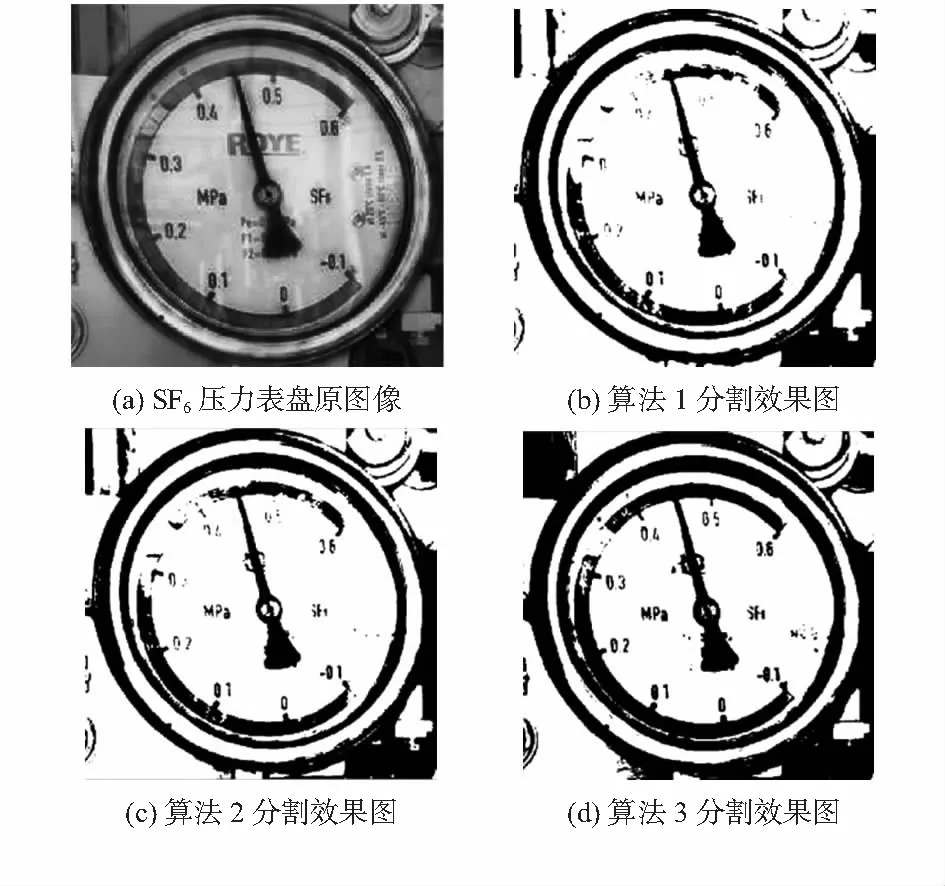
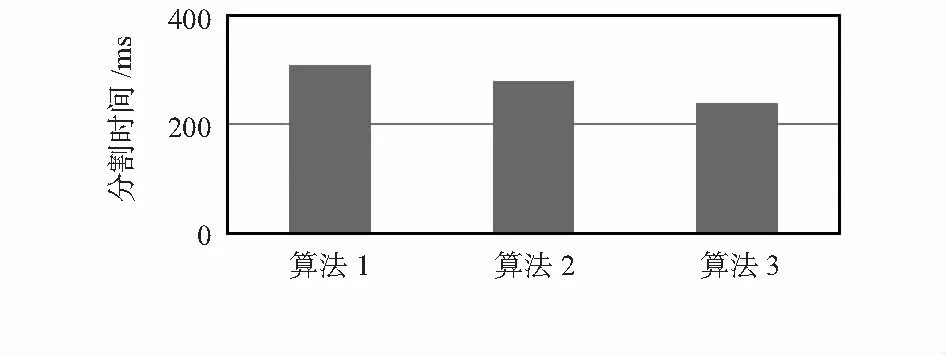
则,当f≥s+t-g时,属于C1;当f 快速Otsu算法,通过s+t整体作为阈值,从而达到降维计算的效果,获得更快速处理效率,但存在一个缺陷s+t整体包含了(s,t)阈值的多种组合,要获得更精确的阈值分割效果,依靠两个阈值的和进行分割是不够的,需要再对满足和值的组合进行优化计算,选出最佳的阈值组合,以获得更好的分割效果。 在上述计算中,f=g-N和f=g+N两条辅助线已经划分了目标类和背景类的像素区域,所以,(s,t)阈值组合也需满足该区域,即满足如下限制条件 (14) 其中,第4分区是必须满足的,即s+t组合的点必定在直线f=s+t-g上,其余的3个区域中至少满足一个区域。如图4所示,A,B两点满足区域4和区域2,且假设s+t组合最佳位置处,s+t可以分解为A(s1,t1)和B(s2,t2)两点,则分别将A、B两点作为最佳阈值点进行计算比较。 图4 改进Otsu算法限制区域 经过限制条件的筛选,将符合需要的阈值组合进行逐一计算,求出最优阈值组合,本文将该计算函数称为最优适应度函数,同时,引入离差平方和法作为传统二维Otsu算法的又一最优阈值约束条件,从而给出一种新的Otsu算法作为最优适应度函数。离差平方和法[15]式(15)所示 (15) (16) 式中n为G0∪G1中的样本点个数,则定义 D(G0,G1)=D0+1-D0-D1 (17) 若G0和G1内部点与点距离较小,则可各自聚为一类,且这两类又能够充分分离,即D0+1很大,则D(G0,G1)必然很大,所以结合二维Otsu算法得到 (18) 将上述经限制条件筛选出的阈值坐标带入最优适应度函数,对比所有组合得数,选取使最优适应度函数达到最大值的阈值为最优阈值s*和t*。改进二维Otsu算法因添加离差平方和计算则需再对角线窄带区域进行遍历,但由于窄带面积较小,计算复杂度降低,提高了计算速率,且维持了原有算法优点,在一定程度上提升了传统二维Otsu算法阈值分割效果,且避免了由于单一法排除边缘和噪声区域而遗漏部分目标和背景像素的问题。 为了验证该算法有效性,利用Matlab实验平台环境,选取传统二维Otsu(算法1)、Otsu双阈值(算法2)和改进二维Otsu(算法3)的算法进行分割效果及时间对比,实验对象选用SF6压力表盘图像,实验结果如图5和图6所示。 图5 分割效果对比 由图5分析知:二维Otsu算法在SF6压力表盘图像分割后丢失部分信息而右侧出现块状阴影,影响后续识别;Otsu双阈值算法延续二维Otsu算法优点,效果优于传统二维Otsu算法,但还是存在部分阴影影响识别;最后使用了本文改进二维Otsu算法,很大程度弥补了丢失的信息且消除阴影,分割效果更优。三种分割算法的处理时间如图6所示。 图6 分割时间对比 根据图6可知分割时间为:二维Otsu算法310ms;Otsu双阈值算法280ms;改进二维Otsu算法240ms。故改进二维Otsu算法分割时间较算法1和算法2少,且在分割效果上处于优势,更能满足识别要求。算法的时间复杂度T(n)表示该算法的执行效率,如式(19)所示 T(n)=O(f(n)) (19) 式中 f(n)为T(n)的同数量级函数,n为模块。 3种算法的时间复杂度如表1所示。 表1 算法时间复杂度 随着模块n的增大,算法执行时间的增长率和f(n)的增长率成正比,因而f(n)越小,算法的时间复杂度越低,算法的效率越高。所以,传统二维Otsu阈值分割算法因对(s,t)双重循环使得运算次数增加,而改进二维Otsu阈值分割算法因添加离差平方和计算需再对角线窄带区域进行遍历,但由于窄带面积较小,故计算次数远少于传统二维Otsu算法,降低时间复杂度,减少了运算时间。 本文以SF6压力表盘图像为对象研究了传统二维Otsu和Otsu双阈值,并结合其优缺点提出了一种改进二维Otsu阈值分割算法,该算法将最优适应度函数作为阈值选取限制条件,并引入离差平方和法为二维Otsu算法的又一最优阈值约束条件,从而给出一种新的Otsu算法作为最优适应度函数来筛选最优阈值。通过实验表明:该算法在阈值分割效果及计算时间上确定了平衡点,优化后的阈值处理效果更能满足表盘监测识别,因此,改进算法对进一步研究基于智能遥视系统的SF6压力表盘图像处理有重要价值。 [1] Lopes N V,Bustince H,Me1o-Pinto P,et a1.Automatic histogram threshold using fuzzy measures[J].IEEE Transactionsons on Image Processing,2010,19(1):199-204. [2] Djema A,Chibani Y.Binarization of historical documents using self-learning classifier based onk-means and SVM[C]∥Procee-dings of 21st European Signal Processing Conference,EUSIPCO,Poland: European Signal Processing Conference,2013:1-5. [3] 宋淑娟,吴静静,安 伟,等.基于Mean Shift的芯片X光图像层次分割算法[J].传感器与微系统,2016,35(6) :128-131. [4] 宋亚玲,欧聪杰.Tsallis 熵的参数在图像阈值分割中的应用[J].传感器与微系统,2015,34(11):147-149. [5] 谢鹏鹤,杨恢先,王绪四.基于最大累积剩余熵的红外图像分割[J].传感器与微系统,2011,30(7):34-37. [6] 张晓丽.基于改进差分进化算法的二维最大熵图像分割[J].自动化技术与应用,2006,35(6):69-72. [7] 陈 英,杨丰玉,符 祥.基于支持向量机和灰度共生矩阵的纹理图像分割方法[J].传感器与微系统,2012,31(9):60-63. [8] 陈修桥,胡以华,黄友锐.基于二维最大相关准则的图像阈值分割[J].红外与毫米波学报,2005,24(5):397-400. [9] 林正春,王知衍,张艳青.最优进化图像阈值分割算法[J].计算机辅助设计与图形学学报,2010(7):1201-1206. [10] 吴一全,潘 喆,吴文怡.二维直方图区域斜分阈值分割及快速递推算法[J].通信学报,2008,29(4):77-83. [11] Arora S,Acharya J,Verma A.Multilevel thresholding for image segmentation through a fast statistical recursive algorithm[J].Pattern Recognition Letters,2008,29(11):119-125. [12] 胡 兵,杨敏华.改进的Otsu算法在多尺度图像分割中的应用研究[D].长沙:中南大学,2012. [13] 钟雪君.一种改进的Otsu双阈值二值化图像分割方法[J].电子世界,2013(4):104. [14] 李 斌,郭剑毅.一种带约束的最小离差平方和系统聚类法及应用[J].计算机应用,2005,25(1):45-48. Research on improved two-dimension Otsu algorithm for SF6pressure dial image segmentation* ZHANG Chang-sheng1, FENG Guang1, LIU Zi-yu2, LI Chuan1, QIAN Bin1 (1.Faculty of Information Engineering and Automation,Kunming University of Science and Technology,Kunming 650500,China;2.Yunnan Electric Power Design Institute Co Ltd,China Energy Engineering Group,Kunming 650051,China ) To enhance the image segmentation accuracy of SF6pressure dial,an improved two-dimensional Otsu algorithm is given through comparing two threshold segmentation algorithms such as traditional two-dimensional Otsu and Otsu double threshold.Aiming at the existing defect of optimal threshold selecting by two-dimensional Otsu algorithm,the overall threshold is redistinguished and combined with the square sum of deviations which is regarded as the fitness function,which can select the best threshold value to boost threshold segmentation effect of the target image.The experimental results show that the proposed algorithm not only meets segmenting the target area on the SF6pressure dial image,but also has higher stability,rapidity and segmentation precision. SF6pressure dial; image segmentation;the optimal threshold; fitness function; improved two-dimension Otsu algorithm 10.13873/J.1000—9787(2017)07—0008—04 2016—08—11 云南省中青年学术和技术带头人后备人才项目(2012HB011);昆明理工大学学科方向建设研究(14078212) TP 391.41 A 1000—9787(2017)07—0008—04 张长胜(1970-),男,副教授,研究生导师,从事智能与光纤传感检测研究工作,E—mail:ttztty@sina.com。

4 实验结果与分析

5 结 论
