基于人机共驾的车道偏离防避控制*
2017-08-09汪选要王其东高振刚王家恩
汪选要,王其东,高振刚,王家恩
(1.合肥工业大学汽车与交通工程学院,合肥 230009; 2.安徽理工大学机械工程学院,淮南 232001)
基于人机共驾的车道偏离防避控制*
汪选要1,2,王其东1,2,高振刚1,王家恩1
(1.合肥工业大学汽车与交通工程学院,合肥 230009; 2.安徽理工大学机械工程学院,淮南 232001)
提出了两层驾驶员转向预测模型,基于驾驶员视觉预瞄信息的第一层体现了路径跟踪特性,基于神经肌肉动力学模型的第二层体现了驾驶员转向操作特征,采用CarSim/Simulink对比了不同状态驾驶员的路径跟踪性能。设计了车道偏离防避系统(LDAS)的期望横摆角速度观测器和转角PID控制器。建立了转向系统等效动力学模型,并基于滑模理论设计了LDAS的鲁棒转矩控制器。由于车辆偏离车道程度与预瞄点的侧向偏移量和驾驶员力矩的关系不能精确描述,故基于模糊控制理论设计了LDAS人机共驾模糊控测器。进行了基于CarSim/Simulink的仿真和基于CarSim/LabVIEW RT的硬件在环试验,对比了驾驶员、LDAS控制器和人机共驾纠正车辆偏航的能力。结果表明,所提出的人机共驾策略能及时纠正车辆偏航,使之恢复到正常车道,并保证从人机共驾到驾驶员控制切换过程的平顺性。
车道偏离;驾驶员模型;人机共驾;共控系数
前言
在无人驾驶技术无法保证绝对可靠的前提下,辅助驾驶技术是智能车发展的重要组成部分,根据统计[1],约有50%的交通事故是因为车辆偏离正常的行驶车道引起的,究其原因主要是驾驶员心神烦乱、注意力不集中或疲劳驾驶,因此希望通过研究辅助驾驶技术来提高驾驶安全性,特别是通过主动安全技术阻止交通事故的发生。
车道偏离预警系统(lane departure warning system, LDWS)在驾驶员无意识(驾驶员未打转向灯)偏离原车道时发出警报,或转向盘开始震动以提醒驾驶员目前车辆偏航的状况,为驾驶员提供更多的反应时间,从而大大减少了因车辆偏离车道引发的碰撞事故。而基于跨道时间(time to lane crossing, TLC)的辅助决策成为了车道偏离预警系统的关键,如果TLC阈值选取得过于保守会导致预警系统误报警[2-3],严重影响驾驶员的驾驶心情。车道偏离识别算法详见文献[4]和文献[5]。
与LDWS类似的系统是车道偏离防避系统(lane departure avoidance system, LDAS)[6]。LDAS最常用的转向执行器为基于电动助力转向(electric power steering, EPS)系统的电机,文献[7]中基于EPS实现了车道保持控制,并解决了EPS部件与车道保持执行部件之间的协调问题。文献[8]~文献[10]中将线控转向作为LDAS和车道保持辅助系统(lane keeping assistance system, LKAS)的执行机构,但线控转向系统成本高。可通过差动制动控制[11-12]或差动驱动控制产生横摆力矩纠正车辆恢复到正常车道,但差动制动会影响乘坐舒适性,而差动驱动比较适合轮毂电机驱动。
人机共驾需要执行器转向与驾驶员转向的叠加,LDAS人机控制权重的分配成为了关键。文献[13]中基于复合Lyapunov函数和线性矩阵不等式等理论提出了LDAS切换控制策略,算法比较复杂。文献[14]中提出了一个触觉引导系统实现驾驶员和转向执行器共同控制转向盘。文献[15]中建立了人-车-路闭环车道保持系统模型,基于预瞄控制并通过人机协调指标实现LKAS的人机协调控制。文献[16]中基于驾驶员模型识别驾驶员的意图来最小化LKAS控制器的干预,从而实现人机协调控制。
上述方法没有实时在线考虑驾驶员的状态,文献[17]中基于人机主权分配模块设计了LDAS的LPV/H∞转角控制器和2阶滑模转矩控制器,且设计转向控制器时考虑了驾驶员特性,但其人机权重分配比较复杂,为了在线协调从LDAS人机共驾到驾驶员驾驶模式平滑切换,还须进一步研究驾驶员不同状态下人机权重的分配。本文中提出了反映驾驶员生理与心理特征的车道保持神经肌肉动力学转向模型,基于PID控制和滑模控制理论提出LDAS的转角转矩双闭环控制,基于模糊控制理论设计人机共驾的共控系数模糊控制器,并基于CarSim/Simulink仿真和CarSim/LabVIEW RT硬件在环仿真验证LDAS人机共驾性能。
1 驾驶员转向模型
基于驾驶员神经肌肉特性的道路预瞄跟踪控制器的驾驶员闭环转向模型如图1所示。道路跟踪层根据视觉预瞄信息通过路径跟踪自动转向实现车辆侧向位置控制,但这不能反映驾驶员的转向意图,因此通过内环体现驾驶员转向行为神经肌肉的反应特性,从而实现补偿转向角误差或对轮胎力的扰动抑制。为体现驾驶员输出力矩的限制引入了饱和环节。
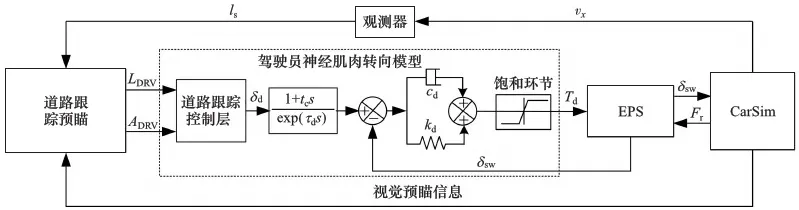
图1 驾驶员转向模型
1.1 道路跟踪层
由图1可见,驾驶员转向模型通过视觉获得预瞄区域的道路信息。图中:LDRV为车辆纵轴预瞄点相对期望路径的侧向偏移量,m;ADRV为车辆纵轴至预瞄点与期望路径之间的误差区域面积,m2。道路跟踪控制器输出的驾驶员期望转角为
δd=-(KL×LDRV+KA×ADRV)
(1)
式中KL和KA为控制器增益,KL=5,KA=10。预瞄距离对驾驶员模型的车道跟踪性能影响很大,设定简单的预瞄距离观测器ls=vxt-8,其中:ls为预瞄距离,m,lsmin=10m,lsmax=18m;vx为车速,m/s;t为时间,t=1s。通过车速纵向控制来消除道路曲率的变化对车道跟踪性能的影响,即道路曲率较大时降低车辆速度,这也符合实际驾驶情况。
1.2 驾驶员特性层
文献[18]中提出了以驾驶员神经肌肉动力学模型来表示驾驶员的转向控制特性,反应延时是人类神经系统固有的认知行为特性,取决于多方面因素,例如年龄、心理和生理状态等。一般驾驶员的反应延时时间τd=0.15~0.3s[19],如图1所示,加入微分校正环节,设定时间常数tc=τd。驾驶员肌肉动力学特性采用弹簧阻尼模型等效,其中kd和cd分别表示弹簧刚度和阻尼系数,反映了肌肉的固有刚度和阻尼。这些特定的驾驶员神经肌肉属性参数可体现驾驶员年龄、心理和生理等特征。
1.3 基于CarSim/Simulink仿真
以驾驶员模型A和B分别模拟驾驶员不同的心理和生理状态,驾驶员模型A处于疲劳驾驶状态,τd=0.3s,kd=5N·m/rad,cd=0.7N·m/(rad/s);驾驶员模型B的注意力高度集中并且精力充沛,τd=0.15s,kd=100N·m/rad,cd=1N·m/(rad/s)。车辆模型为C-Class, Hatchback 2012,跟踪路径如图2所示,两次90°转弯,右转弯半径为200m,左转弯半径为100m。路面附着系数0.85,纵向车速如图3所示。分别以驾驶员A和B跟踪期望路径,路径跟踪
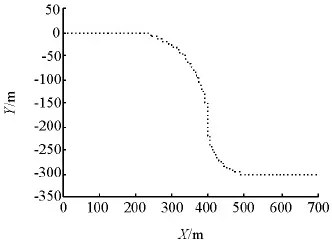
图2 跟踪路径

图3 参考车速
侧向偏移量如图4所示,由于第2个弯道曲率半径较小,而车速超过了60km/h后,驾驶员A和B虽然都能通过左转弯弯道,但驾驶员A的最大偏移量达到了0.56m,路径跟踪精度较差,而驾驶员B的最大偏移量为0.19m,具有较高的路径跟踪精度。由此可以得出,随着肌肉同步收缩的增加和反应时间的缩短,路径跟踪精度也随着增加,同时降低了侧向加速度和转向盘转角的抖动,分别如图5和图6所示。
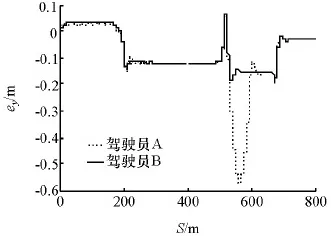
图4 侧向偏移量
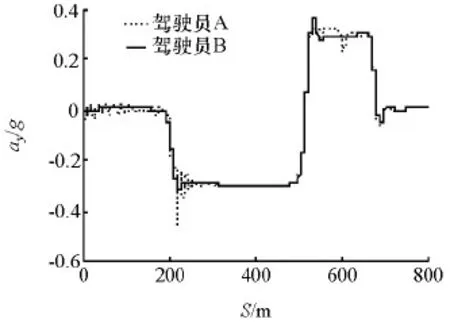
图5 侧向加速度

图6 转向盘转角
2 车道偏离辅助控制器
基于车道跟踪运动学模型[20]设计LDAS期望横摆角速度:
(2)
式中:yL为预瞄点侧向偏移量,m;v为车辆质心速度,m/s;β为车辆质心侧偏角,rad;Δψ为方向角误差,rad;γ为车辆横摆角速度,rad/s。假设横摆角速度γ作为控制输入。由于状态变量v,β和Δψ均未知,令q=v(β+Δψ),式(2)可转换为
(3)
式中:状态向量x=[yL,q]T;系统输入u=γ;系统输出向量y=[yL,q]T。
根据式(2),期望横摆角速度可由下式确定:
γd=-[v(β+Δψ)+KyL]/ls,K>0
(4)


(5)

式(5)为一卡尔曼滤波器,因此对于测量信号的噪声具有很好的滤波作用。

(6)

(7)
2.1 转角PID控制器
转向控制示意图如图7所示,根据跟踪目标路径的期望横摆角速度γd与实际横摆角速度γ之差,由PID控制器输出期望的转向盘转角为
(8)
式中:Δγ=γd-γ;控制器参数整定为Kp=10,Ki=0.15,Kd=0.02。预瞄距离对LDAS控制器的车道跟踪性能影响也很大,设定简单的预瞄距离观测器ls=vxt-15,lsmin=5m,lsmax=18m,t=1s,通过纵向车速控制来消除道路曲率的变化对车道跟踪性能的影响。

图7 转向控制示意图
2.2 滑模转矩控制器
EPS系统的主要作用是提供助力减轻驾驶员负担(提高舒适性)并增加转向“路感”。基于EPS系统还可进一步开发辅助驾驶功能,如图8所示,LDAS和LKAS就是基于EPS系统功能的扩展。本文中LDAS是基于管柱助力EPS系统,减速比为N的减速机是LDAS的执行器。Ta为转向柱上的LDAS辅助力矩,令Td为驾驶员力矩,δsw为转向盘转角,Jsw为转向柱转动惯量,csw为转向柱阻尼,ksw为转向柱刚度;令δm为电机转角,Jm为电机轴转动惯量,cm为电机轴阻尼,km为电机轴刚度;令mr为齿条的当量质量,cr为齿条的当量阻尼,kr为齿条的当量刚度,rp为小齿轮分度圆半径,xr为齿条位移,Fr为作用到齿条上的外力。转向柱上的转矩方程、电机输出轴上的转矩方程、齿条上的力方程和转向系统模型参数数值详见文献[17]。

图8 集成LDAS功能的EPS系统
EPS系统减速机为一对啮合的蜗轮蜗杆副,在理想情况下,转动惯量和摩擦均忽略不计。显然,蜗轮蜗杆副中转矩Tm(t)和Ta(t),转角δm(t)和δsw(t),角速度ωm(t)和ωsw(t),蜗杆的头数z1和蜗轮的齿数z2存在如下关系:
(9)
因此可把转动惯量、黏性阻尼、刚度、转矩和角位移从蜗轮蜗杆副的一侧折算到另一侧。从而可得出减速机输入轴折算到转向管柱的下列各参数:转动惯量N2Jm,黏性阻尼系数N2cm,扭转刚度系数N2km,转矩NTm,角位移δm/N。则折算后,转向柱上的等效转动惯量为Jeq=Jsw+N2Jm,等效阻尼系数ceq=csw+N2cm,转管柱上的等效刚度为
由此可得转向系统等效动力学模型的状态方程:
(10)
其中B1=[0,e,0,0]T


(11)
通过控制使式(11)的运动限制于滑模面S=0,c为固定增益,由于未知参数和驾驶员力矩等扰动,为了镇定不确定性,令
Ta=-Masign(S),Ma>0
(12)
定义Lyapunov函数来分析Δδsw稳定性:

Ta/Jeq]≤-Ma|S|/Jeq+|f(·)‖S|
(13)
Ma>max(|f(·)|)/Jeq
(14)
因此,式(13)和式(14)意味着对于一正的标量ξ,有
(15)
从而S在有限时间内收敛于零,而转向角误差Δδsw通过所指定的参数c趋向于零。为使滑模控制器实现连续控制,用一个连续函数近似替代非连续的切换函数:
(16)
3 LDAS人机共驾策略
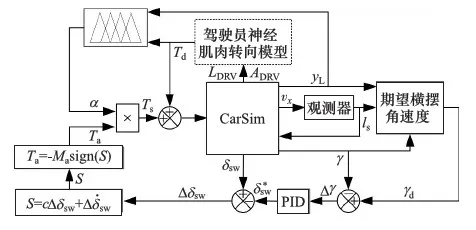
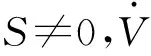
图9 人机共控结构框图
LDAS与LKAS两个系统主要不同点是后者连续运行实现车道保持而前者基于跨道阈值等临界条件才激活。图9为LDAS人机共驾控制结构图,基于阈值设定的危险准则使得人机共控系数α介于0与1之间动态切换。由于基于预瞄点侧向偏移量yL和驾驶员力矩Td与车辆偏离车道程度的关系不能精确描述,而模糊控制理论是解决这一问题的有效途径。在系统运行中,不断检测预瞄点侧向偏移量yL和驾驶员力矩Td,再根据模糊控制规则,对人机共控系数α进行在线调整。

人机共驾模糊控制器的输入为预瞄点侧向偏移量yL和驾驶员力矩Td,输出为人机共控系数α[21]。yL∈[-0.4,0.4]m,Td∈[-6,6]N·m。yL和Td模糊子集均设为{NB,NM,Z,PM,PB},分别代表侧向偏移量和驾驶员力矩的负大、负中、零、正中、正大5个状态。共控系数α∈[0,1],模糊子集为{Z,S,M,L,XL},分别代表共控系数零、小、中、大、较大5个状态。模糊控制器输入隶属度函数分别如图10和图11所示,输出隶属度函数如图12所示。人机共驾模糊规则如表2所示,该模糊控制规则为驾驶员行为和车辆位置提供了一个简单的描述。
图10 yL的隶属度函数
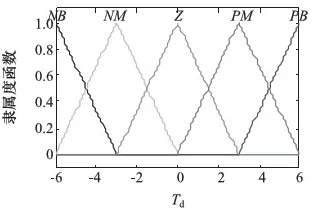
图11 Td的隶属度函数
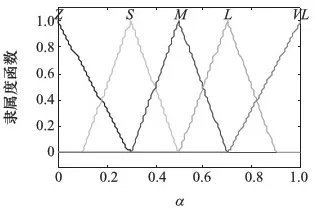
图12 α的隶属度函数
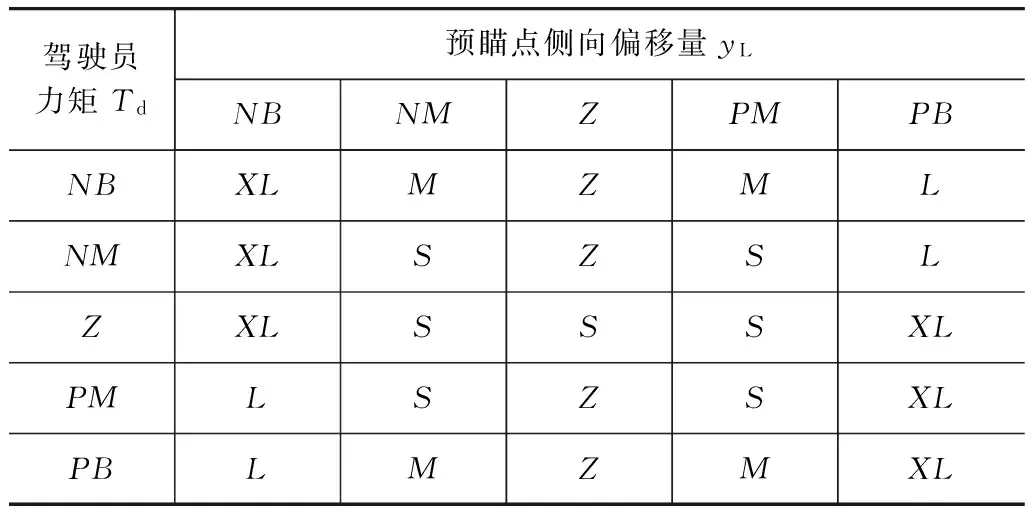
表2 共控系数的模糊规则表
4 LDAS人机共驾仿真
为了评价所提出的LDAS人机共驾的性能,基于CarSim/Simulink仿真验证所提出控制策略的有效性。仿真的车辆模型为E-Class/Sedan,道路模型为Alt3 from FHWA,跟踪路径如图13所示,路面附着系数μ=0.85,弯道的曲率半径近似为155m,道路曲率如图14所示。车辆由直道进入弯道,车速设定为90km/h,从道路模型200m处开始仿真。设定LDAS滑模转矩控制器参数:c=6,Ma=10。模拟驾驶员由于疲劳驾驶或注意力不集中没有意识到前方弯道双手离开了转向盘3.5s,然后驾驶员和LDAS控制器独自和共同纠正车辆恢复到正常车道。驾驶员模型A模拟疲劳驾驶的驾驶员,驾驶员模型B模拟注意力高度集中的驾驶员,通过驾驶员A和B仿真LDAS人机共驾性能,驾驶员A的输出力矩Td∈[-6,6]N·m,驾驶员B的输出力矩Td∈[-9,9]N·m。
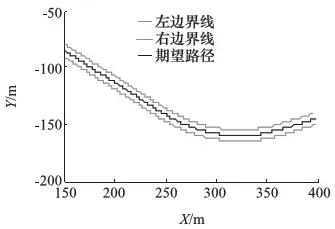
图13 跟踪路径

图14 道路曲率
驾驶员力矩Td如图15所示,跨道距离dDLC如图16所示,驾驶员A失去了对车辆的控制,车辆严重偏离了车道,驾驶员B最小跨道距离为0.29m,也能纠正车辆恢复到正常车道,LDAS控制器最小跨道距离为0.56m,LDAS+A最小跨道距离为0.55m,LDAS+B最小跨道距离为0.61m。可以得出不管驾驶员是疲劳驾驶状态还是注意力高度集中状态,人机共驾均能纠正车辆恢复到正常车道。如果车辆偏离车道驾驶员不接管转向盘LDAS控制器也能纠正车辆恢复到正常车道,从而保证了车辆的行驶安全性。

图15 驾驶员力矩

图16 跨道距离
转向盘转角如图17所示,很明显,驾驶员B虽能纠正车辆恢复到正常车道,但转向盘转角出现了严重的抖动,无法保证车辆的乘坐舒适性。

图17 转向盘转角
人机共驾的共控系数如图18所示,驾驶员A在9.4s之后共控系数α恢复到0.3左右,整个人机纠正过程耗时5.9s;而驾驶员B在8.15s之后共控系数α恢复到0.3左右,整个人机纠正过程耗时4.65s。此后驾驶员拥有更多的转向控制权,从而实现了LDAS从人机共驾到驾驶员控制平滑切换。
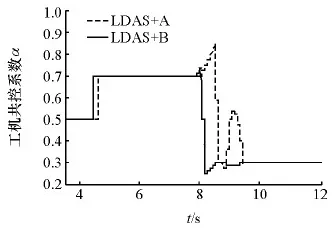
图18 人机共控系数
LDAS控制器的辅助力矩和共控力矩分别如图19和图20所示,注意力高度集中的驾驶员B的辅助力矩和共控力矩均小于驾驶员A,这也符合人机共驾的设计目标,相当于通过共控系数“读懂”驾驶员意图,验证了LDAS人机共驾模糊控制器的有效性。横摆角速度如图21所示,侧向加速度如图22所示,很明显对于驾驶员B独自纠正车辆恢复到正常车道,横摆角速度和侧向加速度出现了很严重的抖动,无法保证车辆的乘坐舒适性,而基于LDAS,LDAS+A和LDAS+B整个纠正过程均平稳过渡,超调量较小,均能使车辆平顺的通过弯道,保证了车辆的乘坐舒适性,验证了所提出的人机共驾控制策略的有效性。
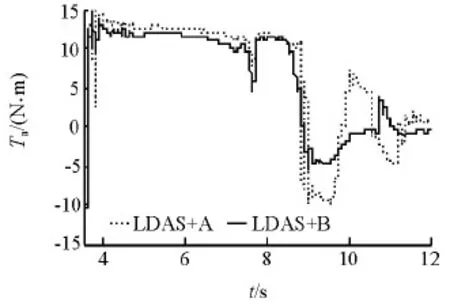
图19 辅助力矩
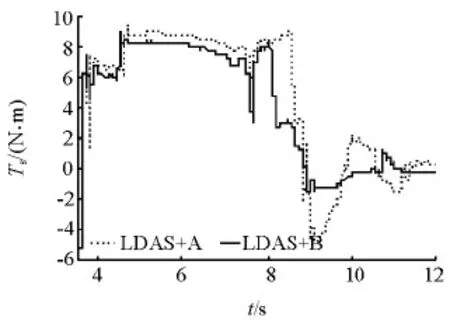
图20 共控力矩
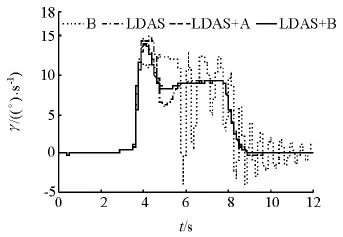
图21 横摆角速度
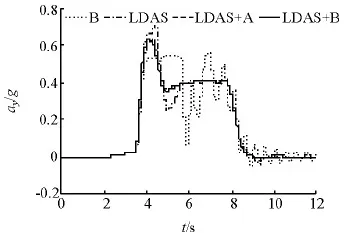
图22 侧向加速度
5 硬件在环试验
通过CarSim/LabVIEW RT硬件在环台架试验来验证控制策略的可行性,硬件在环仿真试验采用的机箱为NI PXIe-1071,数据采集卡为PXIe-6361,控制器为PXIe-8840,CAN卡为PXI-8512/2。通用型交流伺服系统和减速器用来给转向管柱施加实时负载。为实现硬件在环LDAS试验,基于某车型的EPS系统自行开发的控制器替代原装的控制器,硬件在环试验控制结构图如图23所示。
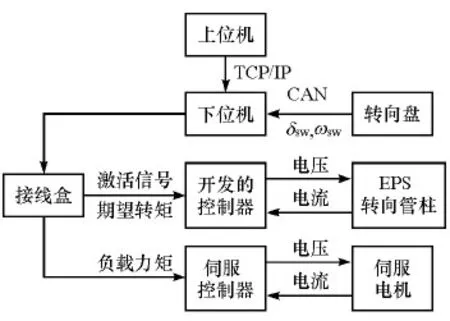
图23 硬件在环试验平台
硬件在环试验条件同上,3.6s人机共驾介入,跨道距离如图24所示,最小值为0.28m;转向盘转角如图25所示,最大值为55°;辅助力矩和共控力矩分别如图26和图27所示,辅助力矩最大值为15.4N·m,而共控力矩最大值则为7.7N·m,由于驾驶员的合理介入减小了辅助力矩;驾驶员力矩如图28所示,在3.6s意识到车辆即将偏离车道,迅速施加了一个高达7.5N·m左右的纠正力矩;侧向加速度如图29所示,侧向加速度最大值为0.75g,轮胎侧向力已处于非线性区;横摆角速度如图30所示,横摆角速度最大值为16.6°/s。综上可见,所提出的LDAS人机共驾控制策略能够及时纠正车辆恢复到正常车道,避免了驾驶员由于疲劳驾驶或注意力不集中没有意识到前方出现弯道而出现的车道偏离事故。
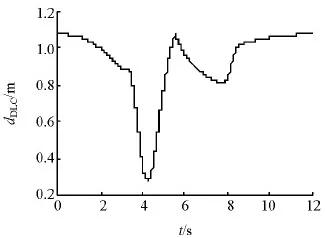
图24 跨道距离
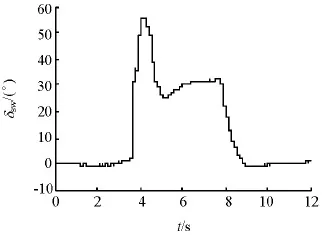
图25 转向盘转角
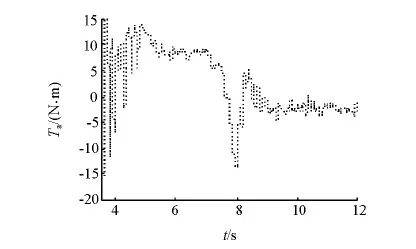
图26 辅助力矩

图27 共控力矩
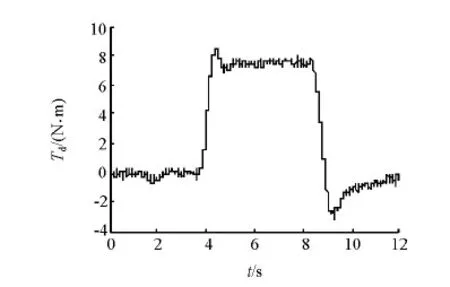
图28 驾驶员力矩
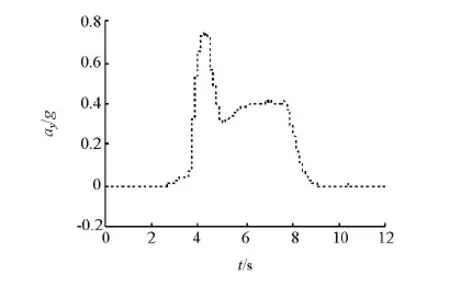
图29 侧向加速度

图30 横摆角速度
6 结论
基于驾驶员预瞄点的侧向偏移量和预瞄区域面积,并考虑驾驶员的神经肌肉特性建立了路径跟踪驾驶员转向模型,根据车速调整驾驶员的预瞄距离,并基于CarSim/Simulink仿真验证了驾驶员处于疲劳驾驶状态和注意力高度集中状态的路径跟踪性能。
设计了LDAS期望横摆角速度观测器,并基于期望值与实际值之差设计了LDAS转角PID控制器,整定了PID控制器参数。建立了转向系统等效动力学模型,并基于滑模理论设计了不依赖于驾驶员力矩和轮胎回正力矩等不确定条件的LDAS鲁棒转矩控制器。
由于预瞄点的侧向偏移量和驾驶员力矩与车辆偏离车道程度的关系不能精确描述,所以设计了LDAS人机共驾模糊控测器,并确定了模糊控制规则,并基于CarSim/Simulink和CarSim/LabVIEW RT硬件在环仿真对比了人机共驾的纠正车辆恢复到正常车道的能力,结果表明,所提出的车辆偏离车道人机共驾控制策略能及时纠正车辆恢复到正常车道,并能保证切换过程的平顺性。本文中仅进行硬件在环试验验证,今后尚须进行实车试验。
[1] VAA T, PENTTINEN M, SPYROPOULOU I. Intelligent transport systems and effects on road traffic accidents: state of the art[J]. IEEE Transactions on Intelligent Transportation Systems,2007,1(2):81-88.
[2] MAMMAR S, GLASER S, NETTO M. Time to line crossing for lane departure avoidance: A theoretical study and an experimental setting[J]. IEEE Transactions on Intelligent Transportation Systems,2006,7(2):226-241.
[3] ZHOU Y, XU R, HU X F, et al. A lane departure warning system based on virtual lane boundary[J]. Journal of Information Science & Engineering,2008,24(1):293-305.
[4] HONG T, KWON J, LEE K, et al. Development of a driver’s intention determining algorithm for a steering system based collision avoidance system[C]. SAE Paper 2013-01-0054.
[5] LEE J, YI K. Development of a coordinated strategy of steering torque overlay and differential braking for unintended lane departure avoidance[C]. SAE Paper 2012-01-0281.
[6] 黄智,吴乙万,刘剑,等.高速车辆车道偏离辅助控制研究[J].机械工程学报,2013,49(22):157-163.
[7] 张海林,罗禹贡,江青云,等.基于电动助力转向的车道保持系统[J].汽车工程,2013,35(6):526-531.
[8] KATZOURAKIS D, ALIREZAEI M, KAZEMI R, et al. Shared control for road departure prevention[C]. IEEE International Conference on Systems, Man, and Cybernetics(SMC), October 9-12,2011, Anchorage, Alaska, USA,2011:1037-1043.
[9] ROSSETTER E J, GERDES J C. Lyapunov based performance guarantees for the potential field lane keeping assistance system[J]. Journal of Dynamic Systems, Measurement and Control, Transactions of the ASME,2006,128(3):510-522.
[10] DOUMIATI M, SENAME O, DUGARD L, et al. Integrated vehicle dynamics control via coordination of active front steering and rear braking[J]. European Journal of Control,2013,19:121-143.
[11] PILUTTI T, ULSOY G, HROVAT D. Vehicle steering intervention through differential braking[C]. Proceedings of the American Control Conference, Jun 21-23,1995, Seatle,WA, USA,1995:1667-1671.
[12] LEE J, CHOI J, YI K, et al. Lane-keeping assistance control algorithm using differential braking to prevent unintended lane departures[J]. Control Engineering Practice,2014,23:1-13.
[13] ENACHE N M, MAMMAR S, NETTO M, et al. Driver steering assistance for lane-departure avoidance based on hybrid automata and composite Lyapunov function[J]. IEEE Transactions on Intelligent Transportation Systems,2010,11(1):28-39.
[14] MULDER M, ABBINK D, BOER E. The effect of haptic guidance on curve negotiation behavior of young, experienced drivers[C]. IEEE International Conference on Systems, Man and Cybernetics(SMC), October 12-15,2008,Singapore,2008:804-809.
[15] LOUAY S, PHILIPPE C, FABIEN C. Shared steering control between a driver and an automation: Stability in the presence of driver behavior uncertainty[J]. IEEE Transactions on Intelligent Transportation Systems,2013,14(2):974-983.
[16] SENTOUH C, DEBERNARD S, POPIEUL J, et al. Toward a shared lateral control between driver and steering assist controller[C]. Analysis, Design, and Evaluation of Human-Machine Systems, September 1-3, 2010, Université de Valenciennes et du Hainaut Cambrésis, France,2010:404-409.
[17] 谈东奎,陈无畏,王家恩,等.基于人机共享和分层控制的车道偏离辅助系统[J].机械工程学报,2015,51(22):98-110.
[18] PICK A J, COLE D J. Neuromuscular dynamics in the driver vehicle system[J]. Vehicle System Dynamics,2006,44(S1):624-631.
[19] BOLIA P, WEISKIRCHER T, MÜLLER S. Driver steering model for closed-loop steering function analysis[J]. Vehicle System Dynamics,2014,52(Supplement):16-30.
[20] SOUALMI B, SENTOUH C, POPIEUL J, et al. Automation-driver cooperative driving in presence of undetected obstacles[J]. Control Engineering Practice,2014,24:106-119.
[21] MERAH A, HARTANI K, DRAOU A. A new shared control for lane keeping and road departure prevention[J]. Vehicle System Dynamics,2015,54(1):1-16.
“汽车轻量化技术与产品巡展-北汽福田站”成功举办
2017年6月28-29日,由汽车轻量化技术创新战略联盟(以下简称“轻量化联盟”)主办、北汽福田汽车股份有限公司承办的“汽车轻量化技术与产品巡展-北汽福田站”活动在福田研究总院举办。中汽学会副秘书长、轻量化联盟秘书长张宁,吉林大学教授、轻量化联盟专家委主任王登峰,北汽福田副总裁陈青山、研究总院常务副院长张志亮、副院长高岩等领导出席巡展活动,汤臣汽车零部件、凌云股份、中材汽车复合材料、杰事杰新材料、北汽模塑、大叶智能科技、彭瑞信息技术、亚威创科源、鑫精合等9家企业携近40件轻量化零部件参展。
本次巡展活动由中汽学会轻量化研究部部长、轻量化联盟副秘书长杨洁主持,张宁秘书长、张志亮常务副院长致辞,参展的展品涉及工程塑料后尾门、动力电池包上盖、3D打印、轻量化管路、复合材料板簧、载重汽车轻量化制动器、载重汽车轻量化轮毂等轻量化零件和技术。在进行产品展示的同时,还安排了特邀专家和参展企业的技术交流报告,特别邀请了中汽学会技术部副部长赵立金、吉林大学教授王登峰分别就节能与新能源汽车技术路线图、车身参数化轻量化技术在商用车中的应用进行了交流。各参展企业结合携带的零部件,围绕载重汽车底盘悬架关键零部件轻量化制造技术、压铸车身零部件设计与性能测试、3D打印技术、复材部件的精准化联合仿真和轻量化精益设计、复合材料在商用车的应用、激光切割技术等分别做了详细的报告。
本次巡展活动吸引了福田商用车超过150名相关工程师的参与,在福田研究院先行技术部、材料工程所以及相关专业部门的大力支持下,取得了预期效果,受到活动参与各方的好评。
Man-machine Shared Driving Based Lane Departure Avoidance Control
Wang Xuanyao1,2, Wang Qidong1,2, Gao Zhengang1& Wang Jiaen1
1.SchoolofAutomotiveandTrafficEngineering,HefeiUniversityofTechnology,Hefei230009;2.SchoolofMechanicalEngineering,AnhuiUniversityofScienceandTechnology,Huainan232001
A two layer driver steering prediction model is proposed, in which the first layer embodies path following characteristic based on driver visual previewed information, the second layer reflects driver’s steering behaviors based on driver neuromuscular model, and the path tracking performances of driver in different states are compared by using CarSim/Simulink. The desired yaw rate observer and the steering wheel angle PID controller in LDAS are designed and the equivalent dynamics model for steering system is established, with robust torque controller of LDAS designed based on sliding mode theory. Due to the relationship of the degree of lane departure with the lateral offset of previewed point and driver torque can’t accurately be described, the fuzzy controller for man-machine shared driving in LDAS is designed based on fuzzy control theory. A simulation with CarSim/Simulink and a hardware-in-the-loop test with CarSim/LabVIEW RT are conducted to compare the rectification ability of vehicle in lane departure by driver, LDAS controller and man-machine shared driving respectively. The results show that the proposed control strategy for man-machine shared driving can timely rectify lane departure and make vehicle back to normal lane, while ensuring smooth switching from man-machine shared control to driver control.
lane departure; driver model; man-machine shared driving; shared control coefficient
10.19562/j.chinasae.qcgc.2017.07.018
*国家自然科学基金(51175135和51405004)资助。
汪选要,副教授,博士研究生,E-mail:xuanyaowang@126.com。
原稿收到日期为2016年7月20日,修改稿收到日期为2016年9月2日。
