电液伺服加载系统的鲁棒自适应PID控制方法
2017-08-08赵孟文高俊峰
赵孟文,高俊峰,戈 源
(1.西安航空学院 陕西 西安 710077;2.内蒙古第一机械集团有限公司 内蒙古 包头 014000)
电液伺服加载系统的鲁棒自适应PID控制方法
赵孟文1,高俊峰2,戈 源2
(1.西安航空学院 陕西 西安 710077;2.内蒙古第一机械集团有限公司 内蒙古 包头 014000)
舵机在安装在飞行器之前,必须在地面对承载能力及其动态性能进行测试,负载模拟是较为有效的方法。针对负载模拟系统的多余力和动态性能要求,提出了一种减小多余力和增加动态性能的有效的PID控制算法。该算法主要以CMAC神经网络控制算法与PID控制算法结合,通过神经网络的在线学习功能和PID的简单快速控制功能,实现了减小多余力的有效控制。并对其稳定性分析进行了理论证明。仿真和试验结果表明该控制算法能够有效的消除系统模拟的多余力。
电液伺服加载系统;鲁棒自适应;PID控制;多余力
舵机是飞行器中非常重要的动力元件,其要求有较高的可靠性和优越的性能。其在装配在飞行器之前,必须经过严格的可靠性、功能和性能测试。电液负载模拟测试系统是舵机在地面进行有效地性能和功能测试手段。
该测试手段的主要技术指标是多余力和动态响应[1]。对此,科学研究者进行了大量的研究,如文献[2-6]通过建立线性化数学模型,提出了多种减少多余力的控制方法。由于电液负载模拟测试系统具有非线性和不确定性特点,文献中的控制方法还有待提高。基于PID及其改进控制算法的优点,在实际负载模拟控制系统中,仍然是控制算法的主力军[7-12]。文献[13-18],将神经网络引入PID控制算法中,提出了基于神经网络的PID自适应控制策略,取得了较好的效果,但其稳定性分析及参数的选取还需要进一步研究。
对此,论文提出了一种采用CMAC神经网络的鲁棒自适应PID控制算法,实现了对多余力的高精度控制。
1 电液伺服加载系统数学模型
电液伺服加载系统结构图如图1所示,其动力学方程为:

图1 电液力伺服系统结构图
1)线性化后的伺服阀流量方程

式中:Qf、pf分别为模拟负载用加载缸的流量和负载压差,Kq、Kc、xv分别为控制模拟负载元件伺服阀的流量放大系数、压力放大系数、阀芯位移。
2)液压缸流量连续方程

式中:At、xt、Vt分别为模拟负载用加载缸活塞有效面积、输出位移、有效容积,Ey、Csl分别为油液等效容积弹性模量和泄漏系数。
3)是模拟负载与被试系统相互作用的力平衡方程

式中:F、mt、bt分别为所模拟的负载力、 系统等效质量和粘性阻尼系数。
4)力传感器方程

式中:Kt为模拟负载用系统的综合刚度系数,xd为被试产品对模拟系统的位移扰动。
5)为控制模拟负载元件伺服阀的阀芯位移为:


2 鲁棒自适应PID控制
假设加载力指令为Fd,令e=Fd-F,有

针对系统(7),给定PID控制器为:

式中,K=[kIkpkd0]。

针对(7),建立了如下控制方程:

选取CMAC神经网络权值调整规则为:

式中,β为CMAC神经网络权值学习系数。
定理 针对所研究的系统(7),采用(10)控制器,应用式(11),当 η>|ε|时,系统是渐近稳定的。
证明:构造系统Lyapunov函数如下所示:

并对其求导可得
注意 sgn(Kz)=-sgn(BTPz),令 η>|ε|,可以得到

由矩阵PBBTP的特点得

证毕。
3 仿真研究与试验结果
3.1 仿真研究
文中采用四阶龙格-库塔算法对所设计的控制器性能进行验证,并与传统的基于结构不变性原理的控制方案进行仿真对比。
鲁棒自适应PID控制器参数为:kp=1.0,kI=0.1,kD=0.025,CMAC神经网络量化等级N=1 0000,泛化参数C=100,学习速度β=0.15,鲁棒系数η=0.5。

图2为采用鲁棒自适应PID控制方法和前馈补偿控制方法的多余力补偿仿真结果曲线对比图,此时加载力指令为零,舵机运动规律为:x=65sin(2πft)mm/s,频率分别 4、5 Hz。

图2 鲁棒自适应PID和前馈补偿控制抑制多余力对比图
由图2仿真结果对比图可见,鲁棒自适应PID控制算法对多余力的抑制效果在各个频率下均优于前馈补偿控制方法,在频率较高时尤为显著。在前馈补偿方法中,由于一方面多余力中高阶次项影响增大、而补偿器只能补偿低阶次项,另一方面舵机运动频率增加使得系统非线性和不确定性影响显著,因此其多余力抑制在运动频率逐渐增大时具有一定的局限性。而鲁棒自适应PID控制算法采用CMAC神经网络在线学习系统非线性、不确定性以及外干扰,其多余力抑制效果优于前馈补偿方法。
为检验鲁棒自适应PID算法对给定加载指令的跟踪能力,给定气动载荷加载指令为:F=5 000+2 000sin(6πt)N,舵机运动规律为 x=65sin(10πt) mm/s,图3为仿真结果曲线。
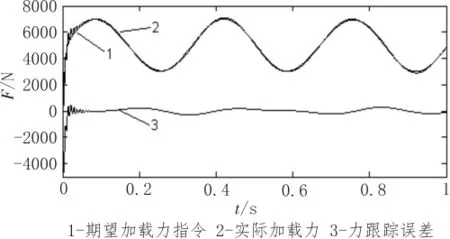
图3 鲁棒自适应PID控制对给定加载力的跟踪仿真结果
由图3仿真结果可见,鲁棒自适应控制算法对给定期望加载力指令具有较高的跟踪精度,控制效果较好。
3.2 试验结果
根据前文的方法,建立了实际的模拟负载系统进行试验,试验条件为:油温<50°,环境温度<30°,油源压力为18 MPa。
试验为某舵面在某一飞行状态下的气动载荷模拟试验,试验结果如图4所示。试验中,该舵面由舵机操纵按一定规律由0度运动到30度,稍作停留后由30度回到0度,其气动载荷根据提供的角度与加载力数据对采用3次样条插值算法进行拟合而得到。

图4 试验结果
由舵面气动载荷模拟试验结果可见,采用鲁棒自适应PID控制算法的电液伺服加载系统对舵面气动载荷的点点跟踪精度较高,跟踪误差不足100 N。
4 结 论
针对电液伺服加载系统中存在的非线性、不确定性以及外干扰等特性,本文提出了一种鲁棒自适应控制算法,并给出了闭环系统稳定性条件。仿真研究与试验结果表明该控制算法对多余力具有较强的抑制能力,对系统非线性和不确定性具有较强的鲁棒性,对期望加载力指令具有较好的跟踪性能。
[1]郑凯锋,陈思忠.比例阀控制非对称液压缸系统的非线性建模与仿真[J].液压与气动,2013(4):25-29.
[2]耿洁,陈振,刘向东,等.永磁同步电机的自适应逆控制[J].电工技术学报,2011(6):51-55.
[3]叶小华,岑豫皖,赵韩,等.基于液压弹簧刚度的阀控非对称缸建模仿真[J].中国机械工程,2011(1):23-27.
[4]梁利华,刘强,赵琳琳.减摇鳍电液负载仿真台前馈补偿解耦控制研究 [J].中国机械工程,2007,18(4):439-441.
[5]郝经佳,赵克定,许宏光等.双阀控制在电液负载仿真台中的应用[J].中国机械工程,2002,13(10):142-145.
[6]孙一力.基于视觉的四旋翼直升机目标跟踪技术研究[J].电子设计工程,2016(18):159.
[7]钱开国,王伟,申时凯,等.基于蜂窝网格锚点的虚拟力导向节点部署算法[J].计算机测量与控制,2014(6):1839-1841.
[8]闫炳洋,谷立臣.基于AMESim的恒压变频动力系统研究[J].流体传动与控制,2014,23(8):21-24.
[9]王岳鹏,霍修坤,权希龙.八通道串口数据采集与处理虚拟仪器系统设计[J].电子设计工程,2010(5):40.
[10]刘军龙,姜继海,欧进萍,等.直驱容积控制电液伺服系统模型与动态特性[J].哈尔滨工业大学学报,2011,43(7):61-65.
[11]王莉娜,朱鸿悦,杨宗军.永磁同步电动机调速系统PI控制器参数整定方法[J].电工技术学报,2014,29(5):104-117.
[12]付永领,刘和松,庞饶,等.用于直驱式机电作动器的自抗扰控制研究[J].四川大学学报(工程科学版),2011,43(2):121-127.
[13]石良臣.MATLAB/Simulink系统仿真超级学习手册[M].北京:人民邮电出版社,2014.
[14]李壮云.液压元件与系统[M].北京:机械工业出版社,2011.
[15]孙春耕,周永明,袁锐波,等.轧机液压压下AGC系统伺服阀的选择[J].机床与液压,2011,39(14):68-69.
[16]李瑞,贾建芳,杨瑞峰.负载模拟器控制策略的研究综述[J].液压与气动,2012(10):12-16.
[17]李罡,贺向宗,李宝仁,等.变刚度电液力负载模拟器自适应反步控制[J].液压与气动,2015(9):130-133.
[18]刘忠伟,青先麒.巨型模锻液压机同步系统的模糊PID控制研究[J].锻压技术,2015,40(4):89-95.
Research on robust adaptive PID control of electro-hydraulic servo load system
ZHAO Meng-wen1,GAO Jun-feng2,GE Yuan2
(1.Xi’an Aeronautical University,Xi’an 710077,China;2.Inner Mongolia First Machinery Group Corporation,Baotou 014000,China)
Before installation in the aircraft,the steering gear must be to carrying capacity and its dynamic performance must be to testing,load simulation is an effective method.For surplus torque and dynamic performance of the load simulation system,this paper proposes a reduces the surplus torque and increase the dynamic performance of the PID control algorithm effectively.The algorithm mainly by CMAC neural network control algorithm combined with PID control algorithm,through online learning functions of neural network and PID simple fast control function,reduce the effective control of surplus torque is realized.And its stability analysis in theory to prove.Simulation and experimental results show that the proposed control algorithm can effectively eliminate the surplus torque of system simulation.
electro-hydraulic servo load system;robust adaptive;PID controller;surplus force
TN99
:A
:1674-6236(2017)13-0178-04
2017-04-05稿件编号:201704029
陕西省自然科学基金项目(2014JM2-5069);陕西省教育厅科研计划项目资助(15JK1378)
赵孟文(1968—),男,陕西渭南人。研究方向:液压伺服系统。
