变论域模糊PID控制算法在开关磁阻电机中的应用
2017-08-08蒋泽浩
蒋泽浩
(南京理工大学 自动化学院,江苏 南京210094)
变论域模糊PID控制算法在开关磁阻电机中的应用
蒋泽浩
(南京理工大学 自动化学院,江苏 南京210094)
针对开关磁阻电机非线性严重、参数及结构易变的特点,在开关磁阻电机的调速中引入变论域模糊PID控制算法。首先从基本电磁规律出发,分析了开关磁阻电机的工作原理及调速特性。介绍了变论域模糊PID的控制原理,并对控制器进行着重研究,最后通过matlab搭建控制器进行仿真,该算法较常规的PID控制具有更好的控制性能。
开关磁阻电机;变论域;模糊PID;MATLAB
开关磁阻电机调速是一种兼交流、直流调速的新型调速系统,因其结构简单、成本低、效率高,具有优良的调速和灵活的可控性,受到人们的普遍认可,并在电动车用驱动系统、家用电器、工业应用、伺服系统及航空航天等领域中得到广泛的应用。但由于开关磁阻电机的非线性及变结构、变参数的特点,使得对其建立精准的数学模型比较困难,难以采用固定的参数获得理想的控制性能,因此研究将在不确定参数的情况下获得较好的控制性能,对于开关磁阻电机调速具有重要意义。
模糊控制方法是建立在模糊数学理论基础之上的,根据操作人员的实践经验,模拟人的思维方式,实现某些难控问题的一种智能控制方法。本文通过对变论域模糊PID控制器进行设计,将变论域模糊糊PID的算法应用于开关磁阻电机的调速中,获得了较好的控制效果。
1 开关磁阻电机相关理论
1.1 开关磁阻电机的结构及原理
开关磁阻电机(SRM)是一种定子、转子双凸极可变磁阻电机。结构和尺寸同相同规格的Y系列异步电动机相同,常用的磁阻电机的定子片上有12个齿和12个槽。定子铁心上均套有一个集中绕组,绕组为多股并绕的软线圈,嵌套在定子槽内。开关磁阻电机的转子无绕组,也无永磁体,转子铁芯由硅钢片迭压制成,转子片上有8个齿,8个槽。开关磁阻电机的结构简单,转子上只有集中绕组,机械强度很高,易于制作,故障率较低。
1.2 电机的控制模型
当开关磁阻电机的相电流为平顶波电流时,得其平均电磁转矩为:

m为电机相数,Nr为转子齿数,Us电源电压,ϖr转速,θon绕组开通角θoff绕组关断角,θ2相电感上升起始角,Lmin(Lmax)最小(最大)相电感。
当电磁转矩为参数 Us、θon、θoff及受控变量 ϖr的函数,则转矩的全微分方程为:

对于开关磁阻电机的调速,通常为定速系统,对于某时间点上的扰动可用各变量的微分做相应的增量替换,对开关磁阻电机的转速控制采用PWM的控制方式,θon和θoff为常数,这样简化方程为:

机械运动的方程增量为:

其中J为转动惯量,D为粘性摩擦系数,TL为负载转矩。
斩波的过程可看作调节器输出ΔUASR的采样过程,放大的倍数为Kc,则功率变换器的S域小信号模型为:

当控制方式选择为PID调节器时,传递函数为:

Kp、TI、KD分别为比例、积分、微分常数。简化的采用PWM控制小信号的开关磁阻电机调速模型如图1所示。
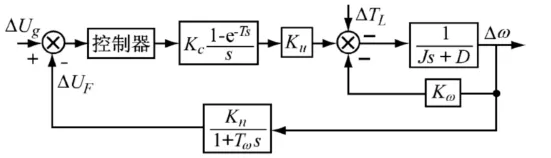
图1 PWM调速的控制模型图
2 变量域模糊PID控制器设计
模糊控制是一种基于模糊集合理论、将技术人员的控制经验转化为工控机可识别的控制规则的智能算法。模糊系统的基本原理框图如图2所示,其核心控制部分是模糊控制器。
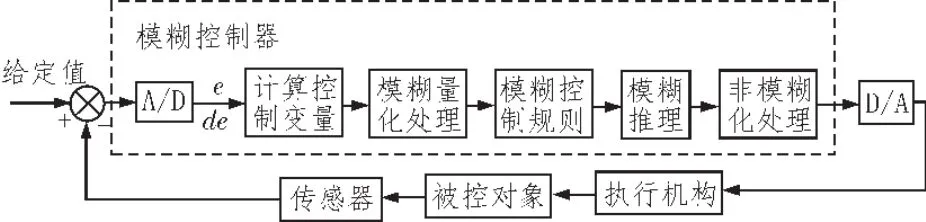
图2 模糊控制系统框图
模糊控制器的算法设计过程为:将传感器测量的被控量的检测信号与系统的给定值比较,得到系统的偏差信号e(精确值),将偏差信号e与偏差信号的变化量ec作为模糊控制器的输入量,并通过量化因子将e与ec的精确值转换为模糊量,由隶属函数确定相应模糊语言值,构成输入量的模糊集合˜,再将输入量的模糊集合˜与代表模糊控制规则的模糊矩阵进行模糊决策,得到模糊控制器的输出量˜,但是模糊量˜不能作为模糊控制器的输出,需要经过反模糊化转换为执行机构可以识别的精确量,来实现对被控对象的控制,控制流程图如图3所示。
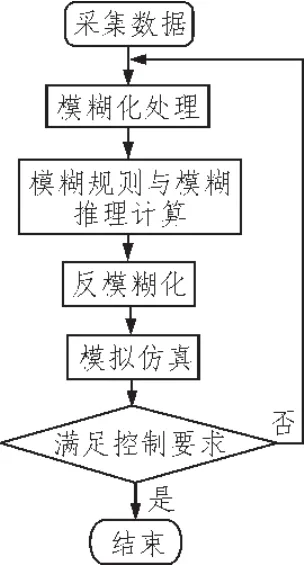
图3 模糊控制系统流程图
2.1 模糊化处理
模糊量化处理过程一般包括确定输入量、输出量的基本论域,确定模糊量论域,确定模糊语言值集合与模糊隶属函数。
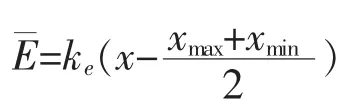
1)确定变量的实际论域。当变量论域不是对称区间时需要在模糊化之前,首先对输入、输出变量的论域进行线性变换,将变量取值区间转换到设定的基本论域范围内。设输入量的实际变化范围为(xmin,xmax),对应的等级量的模糊论域为(-E,E),对应的尺度变换与量化公式为:

2)确定模糊子集与语言值的隶属曲线
在模糊控制器中,模糊子集,即模糊语言值的个数与控制器的控制效果有直接关系。选取模糊语言值时,既要确保控制效果,又要考虑控制规则的灵活应用。常用的模糊子集有:{NB,NS,ZO,PS,PB},{NB,NM,NS,ZO,PS,PM,PB}等。
模糊控制器的隶属函数就是描述模糊语言值与模糊量隶属度关系的映射,一般有函数型和数字型两种描述方法。函数型描述方法一般适用于模糊论域是连续的、隶属关系是对称的模糊系统,常用的形式有正态隶属函数、三角形隶属函数等如图4、图5所示。
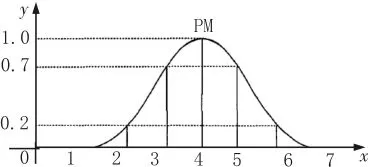
图4 正态分布隶属函数示意图

图5 三角隶属函数示意图
2.2 模糊规则与模糊决策
模糊规则与模糊决策是决定模糊控制器控制效果的核心部分。模糊规则库一般是由操作人员或现场专家总结控制经验而来,其表现形式是有条件语句的集合或者表格形式,模糊规则表示输入量论域E到输出量论域U的模糊关系R。
常见的模糊关系有:
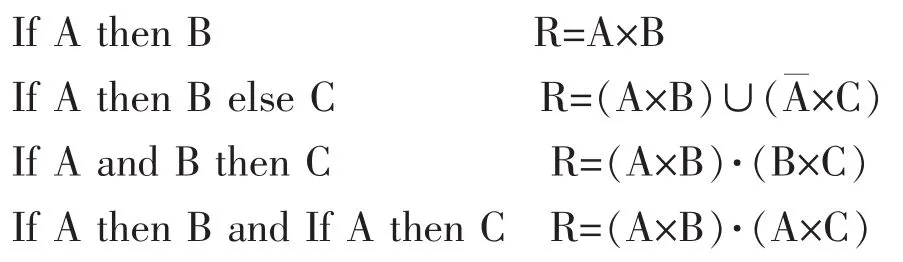
每一条模糊规则都对应模糊论域上的一个模糊关系,将所有的模糊规则“或”运算,就得到系统总体的模糊关系,表达式为:

模糊决策指的是一种模糊推理的方法,主要通过输入量集合E、EC利用模糊关系矩阵,计算控制器输出U。目前应用较多的模糊决策方法是Mamdani极大极小模糊推理法。
2.3 变论域模糊自整定PID控制器
模糊自整定PID控制器是技术应用较成熟的Fuzzy-PID复合控制方法,它是模糊控制与PID控制的结合体,利用模糊算法对PID控制器的比例、积分、微分系数进行在线调整,从而获得较好的控制效果。

图6 模糊自整定PID控制器的结构图
模糊自整定PID控制器常采用二维模糊控制器,其输入变量一般为设定值与测量值的偏差量e及其变化率ec,主要控制思路为:利用操作人员的控制经验在系统响应过程中实时调整PID控制器,修正控制器的Kp、Ki、Kd,实现了系统的 “自整定控制”,结合了模糊控制鲁棒性好、不需要建立精确数学模型的优点,利用PID控制器弥补了模糊控制无法实现无差控制的缺点,使被控对象具有良好的性能指标,其控制结构如图6所示。
由模糊控制器整定的PID最终数学表达式为:

其中,ΔKp,ΔKi,ΔKd 为模糊控制器的输出。
2.4 变论域模糊自整定PID控制器的实现方法
具体方法为:在模糊自整定PID控制器的输入输出接口加入定式函数型伸缩因子,选取的伸缩因子为系统的偏差与偏差变化量的函数,使伸缩因子随系统响应的而不断变化,实时调整模糊控制系统的量化因子与比例因子,进而改变了模糊系统的论域,提高了控制效果。变论域模糊自整定PID控制器的结构框图如图7所示。

图7 变论域模糊自整定PID控制器系统框图
3 系统仿真试验
将此次设计的模糊控制器对一台四相8/6级开关磁阻电机在MATLAB上进行模拟仿真,电机的额定电压为280 V,额定电流为7.9 A,额定功率为2.2 W,利用近似解析法得:Lmin=1.3 mH,Lmax=7.6 mH,θ2=0.15 rad,J=5.8*10-2kgm2取 ωr=157 rad/s,Kc=280×0.9/6=42,Tω=2 ms,T=0.5 ms,仿真的结果如图 8 所示。结果表明该算法能较快的达到平衡状态,稳定性能好,满足设计要求。

图8 变论域模糊自整定PID控制器系统框图
4 结 论
文中以开关磁阻电机调速基础入手,引入变论域模糊糊PID的算法,并通过MATLAB进行仿真试验,该算法能快速的将电机速度调整到稳定状态,系统运行稳定,满足设计要求。
[1]张彧豪,王艳.基于LabVIEW的开关磁阻电机测试平台设计[J].微特电机,2016(8):12-13.
[2]陈梁远,李黎川.一种往复开关磁阻直线电机的设计与控制[J].中国电机工程学报,2012(3):131-135.
[3]赵阳,董颖华,陆婋泉,等.大功率开关磁阻电机EMI噪声综合分析与处理[J].中国电机工程学报,2011(21):8-18.
[4]许爱德,樊印海,李自强.空间电压矢量下SRM转矩脉动最小化[J].电机与控制学报,2010(1):27-36.
[5]江华,高赟.常用的开关磁阻电机仿真研究[J].防爆电机,2014(3):69-73.
[6]张珍,韦忠朝.开关磁阻电机在家用食物料理机中的应用[J].湖北工业大学学报,2012(1):157-160.
[7]罗文明,王少杰,陈伟,等.基于模糊PI控制的永磁同步伺服电机转速系统仿真分析[J].自动化技术与应用,2014(11):215-219.
[8]刘明,宋弘.自适应模糊PID智能控制器在无刷直流电机速度控制系统中的应用[J].电机与控制应用,2012(11):155-159.
[9]花为,华浩,赵桂书,等.一种用于电动自行车的高性能开关磁阻电机系统[J].南京航空航天大学学报,2014(1):67-69.
[10]罗文明,王少杰,陈伟,等.基于模糊PI控制的永磁同步伺服电机转速系统仿真分析[J].自动化技术与应用,2014(11):80-83.
[11]孔辉.开关磁阻电机智能调速控制系统的开发[D].青岛:青岛科技大学,2012.
[12]凌岳伦.开关磁阻电机有限元仿真研究与控制实现[D].西安:西安科技大学,2010.
[13]石磊.开关磁阻电机起动过程的研究[D].西安:西安科技大学,2010.
[14]董健.开关磁阻电机有限元分析及其特性仿真[D].太原:太原理工大学,2010.
[15]吴建华著.开关磁阻电机设计与应用[M].北京:机械工业出版社,2000.
Application of variable universe fuzzy PID control algorithm in switched reluctance motor
JIANG Ze-hao
(School of Automation,Nanjing University of Science and Technology,Nanjing 210094,China)
According to the nonlinear characteristics of switched reluctance motor,parameter and variable structure,variable universe fuzzy PID control algorithm in switched reluctance motor.Firstly,from the basic electromagnetic laws of analysis of the working principle and characteristics of switched reluctance motor speed.This paper introduces the control principle of variable universe fuzzy PID controller,and the focus on,and finally through the MATLAB controller built by simulation,this algorithm has better control performance than the conventional PID control.
switched reluctance motor;variable universe;fuzzy PID;MATLAB
TN709
:A
:1674-6236(2017)13-0174-04
2016-09-29稿件编号:201609254
国家自然科学基金项目(61673219);江苏省“六大人才高峰”项目(XNYQC-CXTD-001);天津市科技重大专项与工程项目(15ZXZNGX00250)
蒋泽浩(1991—),男,江苏张家港人,硕士。研究方向:开关磁阻电机的建模与控制,模糊控制理论,PID控制理论。
