结合预设航线的多旋翼无人机避障算法*
2017-08-08廖津余谢习华
廖津余, 谢习华,2,3, 邓 宇,2
(1.中南大学 高性能复杂制造国家重点实验室,湖南 长沙 410083;2.山河智能装备有限公司,湖南 长沙 410100;3. 南方粮油作物协同创新中心,湖南 长沙 410100)
结合预设航线的多旋翼无人机避障算法*
廖津余1, 谢习华1,2,3, 邓 宇1,2
(1.中南大学 高性能复杂制造国家重点实验室,湖南 长沙 410083;2.山河智能装备有限公司,湖南 长沙 410100;3. 南方粮油作物协同创新中心,湖南 长沙 410100)
针对现有多旋翼无人机使用人工势场法进行避障的研究中,仅考虑目标点的安全抵达,少有考虑按预设航线飞行的作业需求,通过在人工势场法中赋予航线“线势场”,将多旋翼无人机的避障与航线飞行进行结合,使无人机避障之后能重回航线。针对传统势场法中的引力场并不适用于无人机,对引力场进行了改进。解决了引入“线势场”后容易导致无人机陷入局部极小点的问题,通过仿真验证了上述改进的效果。
多旋翼无人机; 航线飞行; 避障; 线势场; 改进人工势场
0 引 言
随着信息技术、嵌入式技术、传感器技术的进步,中小型多旋翼飞行器得到了迅速发展,自主性日益提高,行业应用潜力巨大。然而,多旋翼飞行器在低空作业过程中难免会遇到障碍物,因此,飞行器的避障一直是研究热点。现存的小型激光雷达[1]、双目视觉[2]等高效的环境探测手段,也为飞行器的自主避障提供了条件。目前,较成熟的避障算法有A*算法、模糊算法、遗传算法、人工势场法[3,4]等。其中,人工势场法因其描述环境方便,计算量小,在局部环境的实时避障中具有较为突出的优势。
目前,使用人工势场法进行避障的研究中,基本上只考虑了目标点的安全抵达,很少考虑多旋翼无人机实际作业中需要沿航线飞行的情况,文献[5]中虽然考虑了此情况,但未深入研究,没有发现引入线势场后带来的新问题。
考虑到多旋翼无人机实际作业中需沿航线飞行的情况,借鉴文献[5]的思想,在传统的人工势场中,引入了 “线势场”,使无人机避障之后能回到航线中继续执行任务。另外回到规划好的航线还可以尽量避免未知障碍物。考虑到传统势场法中的引力场不适用于运动范围广的无人机,因此,对引力场进行了改进。在引入了“线势场”后,发现势场系数的匹配不当会很容易导致无人机陷入局部极小点,通过改进斥力场解决了这一问题。
1 人工势场法改进
1.1 传统人工势场法
人工势场法最早由Khatib O于1985年提出[6~9],基本思想是在规划空间中建立一个虚拟势场,其中,目标点产生引力场,障碍物产生斥力场,引力和斥力对机器人产生一合力,机器人在合力作用下行进。传统人工势场法如图1所示。
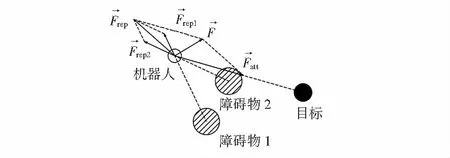
图1 传统人工势场法
引力势函数
(1)
斥力势函数
(2)
式中 q为无人机当前位置点;ρg(q)为q点到目标点距离;ρobs(q)为q点到障碍物表面的最短距离;d为障碍物影响范围;ξ为引力场系数;η为斥力场系数。
在q点对两势函数求负梯度即得到引力和斥力
(3)
(4)

(5)
(6)
势场产生的合力为

(7)
本文将人工势场法作为路径规划方法应用,计算出的合力矢量方向作为期望速度方向,再由底层控制系统进行跟踪。
1.2 人工势场法改进
1.2.1 线势场引入
为了使多旋翼无人机避障后能重回预定航线中,赋予航线一种“线势场”,让航线对无人机产生一个虚拟的引力,图2为“线势场”示意图。

图2 线势场
“线引力”为
(8)

(9)
1.2.2 引力场改进
传统势场法中的引力随机器人到目标距离的增加而线性增大,这对于移动距离较短的地面机器人来说并无显著影响,但对于无人机来说,飞行一段较长距离后,会使引力变化很大,从而可能对避障行为产生不利影响(下文将进行仿真验证),为此,将目标产生的引力改为定值
(10)
式中 w为常数。
1.2.3 斥力场改进
由2.2节的仿真得知,引入“线势场”后,容易导致无人机陷入局部极小点,为此对斥力场进行改进,使斥力始终垂直于航线方向。
改进的斥力为
(11)
(12)

式(12)中4种情形下障碍物产生的斥力方向如图3。
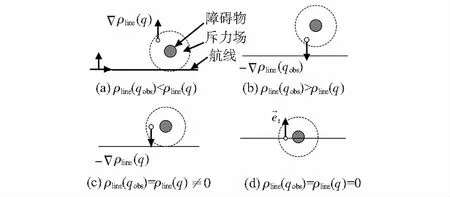
图3 不同情况下的斥力方向
2 仿真分析与验证
2.1 避障仿真场景搭建
人工势场法中,机器人始终仅受外界作用力的影响,因此,适合用动力学分析软件机械系统动力学自动分析(ADAMS)软件进行避障仿真[10],相比于其他传统仿真方式如Matlab,VC环境等,不仅可以观察机器人避障的实时仿真过程,仿真结束后还可以通过ADAMS后处理模块获得丰富数据,同时也避免了编写复杂的矢量运算程序。
搭建的避障仿真场景如图4所示。

图4 避障仿真场景
式(3)、式(4)、式(8)、式(10)、式(11)中各系数的初始取值为:ξ=0.1,η=50,d=3,λ=4,w=4。
2.2 “线势场”仿真验证
引入“线势场”前后的避障轨迹对比如图5所示。

图5 线势场引入前后轨迹对比
由图5看出:引入“线势场”后,可使无人机保持在航线附近飞行,无人机的避障和航线飞行得到了有效地结合。
2.3 传统引力场对无人机避障的不利影响
通过改变引力系数ξ,分别模拟无人机与目标点距离变化10倍、100倍后导致的引力值变化,及其对避障轨迹的影响。初始ξ=0.1,保持其它参数不变,得到的避障轨迹如图6所示。

图6 不同引力下的避障轨迹
由图6看出,ξ从0.1分别变化至1,10(即无人机与目标点距离变大10,100倍)时,避障轨迹愈加靠近障碍物。这说明,对于运动范围较广的无人机来说,当在距目标点较远处遇到障碍物时,过大的引力值有可能会使无人机撞上障碍物。因此,传统势场法中变化的引力并不适用于无人机,将引力改为定值较好。
2.4 引入线势场后的问题和分析
传统人工势场法的固有缺陷之一是存在局部极小点,如图7(a)所示。但一般情况下机器人陷入该点的几率并不高。然而,引入“线势场”后,无人机遇到障碍物时将会更容易陷入局部极小点,如图7(b)所示。
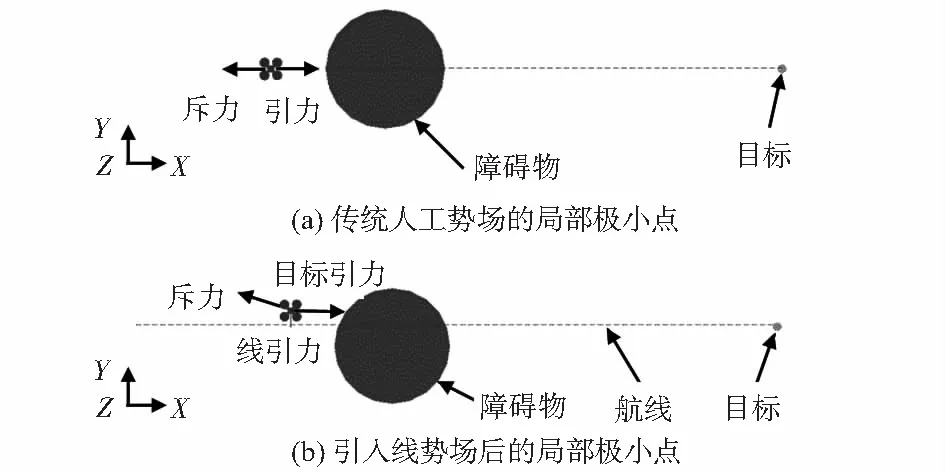
图7 引入线势场前后的局部极小点
无人机陷入局部极小点将停止前进,导致避障失败。对于引入线势场后的局部极小点,虽然可以通过调整势场系数使无人机逃离,但将导致获得的避障轨迹不理想。
陷入图7 (b)所示局部极小点的原因,是由于斥力和线引力的合力与目标引力平衡,导致无人机无法在目标引力作用下前进。所以,若使斥力始终垂直于航线方向,目标引力便不会被平衡,无人机便可以在其作用下不断前进,不会陷入局部极小点,直至到达目标。
2.5 改进斥力场仿真验证
保持其它条件相同,分别使用改进斥力场和传统斥力场进行避障仿真,结果如图8所示。
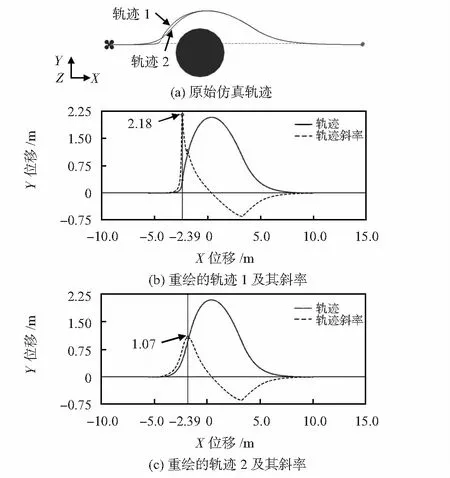
图8 传统斥力场和改进斥力场的轨迹对比
图8 (a)为ADAMS View中的原始仿真轨迹,轨迹1为使用传统斥力场的轨迹,轨迹2为使用改进斥力场的轨迹;图8(b)和图8(c)为在ADAMS后处理模块中以无人机质心X轴位移为自变量,Y轴位移为因变量重绘的2条避障轨迹及其斜率。
从图8看出:使用改进斥力场的轨迹最大斜率为1.07;使用传统斥力场的轨迹最大斜率为2.18;而且图8(b)中的斜率曲线比图8(c)中更陡峭,说明轨迹1的斜率变化更剧烈,较轨迹2欠平滑,使用改进斥力场可获得更平滑的避障轨迹。
3 结 论
针对多旋翼无人机在许多应用场合中需要避障并回到航线执行任务的情况,通过加入新型的“线势场”和改进传统人工势场得到了新的势场算法,并利用ADAMS对该算法进行了仿真研究,得到以下结论:
1)通过在人工势场法中加入“线势场”,可以有效地使无人机在避障之后回到航线中飞行。
2)传统人工势场法中,目标产生的随距离变化的引力对于飞行范围广的无人机来说并不合适,有可能对避障过程产生不利影响,将其改为常值更适用于无人机。
3)加入“线势场”后,无人机在遇到障碍物时容易陷入局部极小点,通过改进斥力场解决了这一问题,而且获得的避障轨迹较传统斥力场更为平滑。
[1] 于金霞,蔡自兴,邹小兵,等.基于激光雷达的移动机器人障碍测距研究[J].传感器与微系统,2006,25(5):31-36.
[2] 于 今,饶 冀,闫军涛.基于双目立体视觉的壁面清洗机器人障碍物检测研究[J].传感器与微系统,2007,26(7):69-72.
[3] Tsourdos A,White B,Shanmugavel M.Cooperative path planning of unmanned aerial vehicles[M].北京:国防工业出版社,2013.
[4] 顾幸方,陈晋音.移动机器人未知环境避障研究[J].传感器与微系统,2011,30(5):16-20.
[5] 许 源.结合粒子群算法和改进人工势场法的移动机器人路径规划[D].杭州:浙江大学,2013.
[6] Khatib O.Real-time obstacle avoidance for manipulators and mobile robots[J].The International Journal of Robotic Research,1986,5(1):90-98.
[7] 游文洋,章 政,黄卫华.基于模糊改进人工势场法的机器人避障方法研究[J].传感器与微系统,2016,35(1):14-18.
[8] 刘和祥,边信黔,王 君.基于传感器信息的AUV局部避碰研究[J].传感器与微系统,2007,26(12):41-46.
[9] 易小芹.基于速度矢量场的实时航迹规划研究[D].南京:南京航空航天大学,2013.
[10] 郑海华,贺继林,赵喻明,等.基于ADAMS的移动机器人避障仿真研究[J].计算机仿真,2014,31(5):336-341.
[11] 贾长治,殷军辉,薛文星,等.MD ADAMS虚拟样机从入门到精通[M].北京:机械工业出版社,2010.
[12] 杨 柳.移动机器人动态路径规划方法研究[D].无锡:江南大学,2011.
Obstacle avoidance algorithm of multi-rotor UAV considering planned path*
LIAO Jin-yu1, XIE Xi-hua1,2,3, DENG Yu1,2
(1.State Key Laboratory of High Performance Complex Manufacturing,Central South University,Changsha 410083,China; 2.Sunward Intelligent Equipment Co Ltd,Changsha 410100,China;3.Southern Regional Collaborative Innovation Center for Grain and Oil Crops,Changsha 410100,China)
Aiming at problem that most research on obstacle avoidance of multi-rotor unmanned aerial vehicle(UAV) using artificial potential field(APF)method,only consider the safe arrival to the target point,rarely considering the actual need of flying on planned path, by giving planned path a“line potential field”in APF algorithm,the obstacle avoidance and planned-path flying are combined,so that the UAV is able to return to the planned path after avoiding obstacle.Considering the UAV has a wide movement range,the Attractive Potential Field in traditional APF method does not apply well to the UAV,so the Attractive Potential Field is improved.It is also found that the introduction of“Line Potential Field”can easily lead UAV fall into the local optimum.After analyzing on this problem,this problem is solved by improving the repulsive potential field(RPF).Simulation verify the effect iveness of aboved impoved improvement.
multi-rotor unmanned aerial vehicle(UAV); planned-path flight; obstacle avoidance; line potential field;improved artificial potential field(APF)
10.13873/J.1000—9787(2017)08—0152—03
2016—09—05
国家科技支撑计划资助项目(2014BAD06B07—1);湖南省军民融合专项项目(湘财企指[2015]42号);湖南省重点研发计划资助项目(2016GK2067)
TP 242
A
1000—9787(2017)08—0152—03
廖津余(1992-),男,硕士研究生,主要研究方向为多旋翼无人机飞行控制、导航。