浅谈微型机器人的控制
2017-08-02黑龙江省齐齐哈尔市实验中学孟庆喆
黑龙江省齐齐哈尔市实验中学 孟庆喆
浅谈微型机器人的控制
黑龙江省齐齐哈尔市实验中学 孟庆喆
机器人技术是当代最具有代表性的高技术领域之一。对于机器人技术的研究和应用形成了一门新的综合型的技术学科—机器人学。作为机器人的核心部分,机器人控制技术也经历了经典控制技术、现代控制技术和智能控制技术的发展过程。机器人控制系统的设计,是一个典型的认识世界和改造世界的过程
微型机器人;控制
1 前言
随着世界科学的不断发展,传统的机器由于功能单一、很难胜任复杂工作的特点,因此越来越不能满足现代生产生活的需要,然而机器人的出现改变这一困境。机器人通过编程来设定多种行为,根据不同的编写程序组合可以独立完成很多复杂的工作任务,所以这就更加明确“自动化”的概念,传统的机器仅仅能在某一方面实现“刚性自动化”,机器人的出现实现了“柔性自动化”这一目标,产生了柔性生产工艺,利用计算机数控机床实现不同类型产品的小批量生产,所以机器人的出现,对于整个人类生产生活过程产生了巨大的改变,大大提高了生产效率。目前用于工业生产的机器人以第一代机器人为主,这种机器人在生产过程中扮演至关重要的角色,主要通过各种遥控器控制来进行操作。21世纪初期,为了进一步提高机器人的性能,在原来一代机器人的基础上安装了多种传感系统,例如温度传感系统、触觉传感系统等,目的是为了增强机器人对周围环境的感知能力,有了这些传感系统,机器人可以完成许多难度更高更复杂的工作任务,例如环境探测、精密仪器的安装与校核等任务都可以胜任,这就是第二代机器人的优势所在。近几年,随着生产力和科学技术的不断进步,人们对机器人的性能又有了更高的要求,比如利用机器人进行深水探测、外部空间探测活动,在救灾或者更加复杂危险的环境中能够独立排除险情,能够妥善处理环境中一些不可预测的事故。所以这就决定了目前机器人不只能拥有感知能力,而且还应该拥有超高的处理问题能力以及面对突发事故时拥有决策和处理能力,主要工作是根据所处的环境特点和工作任务独立制定出自身运行的方案,也就是让机器人“智能化”,就是通常我们所说的第三代机器人。随着机器人的大力发展,逐渐兴起了一门新兴学科---机器人学,主要是由计算机科学、机械电子学、信息控制科学等科学交叉而形成,目前是科学界非常前沿的一门学科,具有非常光明的发展前景。
2 微型机器人发展中面临的问题
(1)当前微型机器人的发展进程中,微型化驱动技术在此进程中占据着非常重要的地位,其水平的高低决定着微型机器人的发展水平,所以目前微型机器人开发研究的主要方向包括:降低耗能、简化结构、位移输出和力输出较大、线控性能优良、体积小,环境发生变化时响应时间少等方面。
(2)目前机器人的主要能源来自于电能,然而对于微型机器人来说,供电导线会对微型机器人的运动能力极为不利,尤其是在复杂的地形中非常不利于机器人的运动。所以要想改善微型机器人这一窘境,就必须对从无电缆微波能源和无线传输方面入手,与此同时开发研究体积小和储能大的微型电池。
(3)目前在核电、医疗、军事方面,使用微型机器人的一个非常重要的前提就是确保安全性和可靠性,其次还应当有在面临复杂环境中能够排除故障和正确解决问题的能力。
(4)微型机器人与普通机器人相比,并不仅仅是在体积上的缩小,还应当在微型驱动器和精加工技术方面的突破,同时还要求设计者在结构理论方面的创新,设计出更有利于微型机器人移动的方案。
(5)微型机器人应该具备能够独立完成某一项或者多项工作的能力,第一步工作就是机器人必须具备自身定位和环境的识别能力,研究视觉感应系统,提高机器人的图像处理效率,因此可以运用人工智能技术和神经网络等先进的技术来解决机器人独立工作的难题。
3 微型机器人的控制
机器人学是根据机器人技术的研究而产生的一门综合类学科,它包括了机械学、力学、计算机科学与技术、控制理论及控制工程、电子信息科学、人工智能、人类学等众多领域的科学。距离世界上第一台遥控机械手臂问世已经过去50多年,在这50多年中,随着计算机科学技术的发展、自动控制理论的行程以及工业生产的迫切需求,已经相继产生出来了三代机器人,分别是第一代可编程的示教型再现行机器人,第二代利用安装传感器具备一定自主能力的机器人,第三代为智能机器人。最初的机器人仅仅只能完成一些简单的抓取、放置、焊接等工作,然而如今开发出能够独立行走,能够进行语言交流并具备一定思维能力的智能机器人。
根据机器人控制技术的研究发展进程来看,这是一个由简单到复杂的发展过程,在某些方面也符合了马克思主义认识论,能够说明人类认识世界和改造世界是在实践的基础上的辩证统一。总而言之,机器人的发展历程在哲学方面具有很重要的现实意义,机器人技术是当代科学发展高新领域中非常重要的一门技术。为了以后机器人更好的研究和发展,科学界又形成了一门新的综合类型的学科一一机器人学。控制理论和技术是机器人学发展的核心技术,其也主要经历了经典控制技术、现代控制技术、智能控制技术三个阶段,因此从哲学的角度上看机器人的控制理论和技术也是一个非常典型的认识世界和改造世界过程。
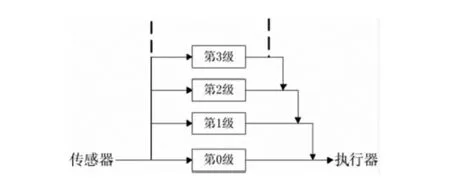
图1 层级归并控制系统
4 小结
从机器人控制的发展看来,它一方面受制于计算机硬件、传感器等的发展,另一方面也与计算机软件理论的发展息息相关。总体而言,它有一个从功能单一到多元,从针对特定硬件的软件到可移植的通用的机器人平台的发展趋势。而现在,机器人软件主要是以跨平台,分层控制,模块化,分布式,便于开发,便于软件复用为主要特点。关于机器人软件的发展可以总结所示。20世纪90年代Windows的出现带来了个人电脑的普及,相信随着机器人平台的统一化,机器人也会迎来一个繁荣发展的春天。
[1]罗怡.双压电薄膜细小管道机器人的研究[D].上海大学博士学位论文,2001.
[2]彭冬亮,吴铁军.微型机器人的模型及研究方向[J].科技通报,2003,19(1):6-9.
[3]张永顺.国外微型管内机器人的发展[J].机器人,2000,22(6):506-513.
[4]徐小云,颜国正,等.六足移动式微型仿生机器人的研究[J].机器人,2002,24(5):427-431.
[5]李勃,吴月华,等.基于压电陶瓷驱动的腹腔手术微型机器人[J].光学精密工程,2001,9(6):535-538.
