永磁同步电机控制技术在城轨牵引系统中的应用
2017-08-02中车永济电机有限公司技术中心张瑞峰牛剑博
中车永济电机有限公司技术中心 王 彬 张瑞峰 牛剑博
永磁同步电机控制技术在城轨牵引系统中的应用
中车永济电机有限公司技术中心 王 彬 张瑞峰 牛剑博
为实现永磁同步电机全速度范围内的稳定运行,在额定速度以下采用最大转矩电流比(MTPA)控制策略,额定速度以上采用单电流调节器的弱磁控制策略。该控制方法实现了高精度转矩控制,扩宽了转速运行范围,直流母线电压利用率高。搭建了基于永磁同步电机的地铁试验平台,试验结果验证了本文所采用方法的有效性。
永磁同步电机;最大转矩电流比控制;弱磁控制
0 引言
城市轨道车辆具有客运量大、站间距离短、行车密度大的特点,其牵引系统性能直接决定车辆运行质量、运行安全及对能源的消耗。初期的城市轨道车辆牵引系统采用直流电机牵引系统,随着电力电子技术及相关矢量控制技术的进步,异步电机牵引系统广泛应用于城市轨道车辆牵引系统中。近些年,永磁同步电机凭借体积小、质量轻、功率密度大,功率因数高和效率高等优点受到广泛关注,而永磁材料成本的降低和性能的提高使永磁电机牵引系统得以在城市轨道车辆牵引系统应用[1-4]。
本文针对某地铁永磁同步电机牵引控制系统,对其矢量控制、弱磁控制和牵引系统结构进行分析研究。永磁同步电机在额定转速以内采用最大转矩电流比控制,在额定转速以上采用基于单Q轴电流调节器的弱磁控制。最后在地铁联调试验平台对180kW的永磁同步电机进行了试验,试验结果验证所采用方法的有效性。
1 永磁同步电机驱动控制技术
1.1 永磁同步电机数学模型及稳定工作点分析
永磁同步电机的稳态电压方程可表示为:

式中,Rs为定子电阻;ud,uq为d、q轴电压分量; id,iq为d、q轴电流分量;Ld,Lq为d、q轴电感分量;ωs为永磁同步电机同步角速度;ψf为永磁同步电机永磁体磁链幅值。
在电流id-iq平面上,永磁同步电机关键曲线轨迹如图1所示。图中深蓝色曲线为最大电流限制圆,棕红色曲线为等转矩曲线,绿色曲线为电压限制椭圆曲线,MTPA曲线为最大转矩电流比曲线,MTPV曲线为最大转矩电压曲线。全速度范围内,当电机转速低于额定转速时,采用恒转矩控制,电流工作点位于点A上;当电机转速高于额定转速时,采用恒功率控制,电流工作点位于曲线AF上。
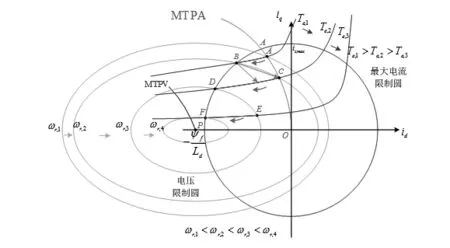
图1 电流平面上I P MS M关键曲线轨迹
额定转速以下时,当转矩变动时,电流工作点位于转矩曲线与MTPA的交点,如图中转矩曲线Te.1与Te.2和MTPA曲线的交点A’和C;额定转速以上时,恒转矩变转速工况,以转矩Te.1恒定、转速由ωr.1升速为ωr.2为例,电流工作点沿A’B曲线移动;额定转速以上时,恒转速变转矩工况,以转速ωr.2恒定、转矩由Te.1减小为Te.2为例,电流工作点沿曲线BC移动。
1.2 永磁同步电机MT P A控制
最大转矩电流比(MTPA)控制,即在给定转矩的情况下,最优配置交直轴电流分量,使定子电流最小,达到单位电流下电机输出转矩最大。最大转矩电流比控制可以减小电机铜耗,提高运行效率,从而使整个系统的控制得到优化。得到MTPA曲线的步骤如下:
1) 构造拉格朗日函数

其中λ为拉格朗日乘数;
2) 根据拉格朗日函数联立相应偏导数方程组

3) 求解参数λ,进而得到电流id和iq之间关系

通过公式(4)可以进一步得到电流id、iq和转矩Te的关系。
1.3 永磁同步电机弱磁控制
当永磁同步电机在高速运行时,只能通过调节定子电流中直轴去磁分量来维持高速运行时的电压平衡,实现弱磁扩速。图2为永磁同步电机单电流弱磁策略框图。
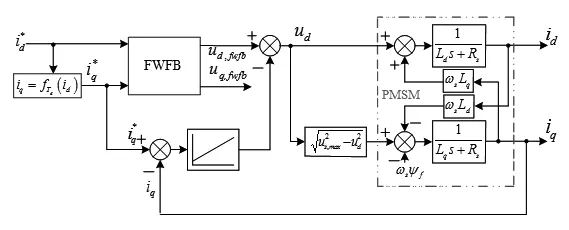
图2 永磁同步电机单电流弱磁策略框图
从图2可知,在单电流调节器弱磁控制下有三个控制环节,首先由调节出的电流指令通过前馈环节给定初始d、q轴电压;然后考虑到电机参数理论值与实际有一定偏差,系统有损耗及相关延时情况下,q轴电流无法进行稳定跟踪,通过加入q轴电流调节器进行相应误差补偿与提高其电流响应特性;最后,在弱磁工况的电压幅值限制条件下,依据之前环节调节出的d轴电压分解出q轴电压并通过硬件实现施加电压于电机端。
2 城轨永磁同步电机牵引系统结构
城轨永磁同步电机牵引变流器主电路如图3所示:
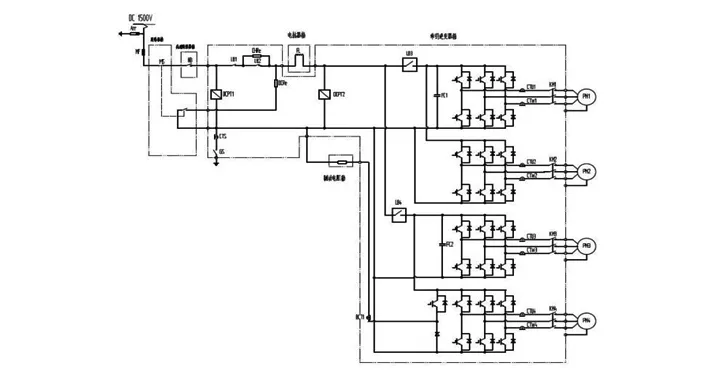
图3 变流器主电路
该牵引变流器同时控制4台永磁同步电机运行,变流器参数如表1所示:

表1 变流器参数
所控制的永磁同步电机额定功率180kW,额定电压AC1000V,额定电流116.4A,电机极数为8,额定转矩859.4N·m,额定频率133.3Hz,额定转速2000 r/min,最高转速4250r/min。
3 试验结果与分析
永磁同步电机全速度范围下牵引制动的试验波形如图4所示。
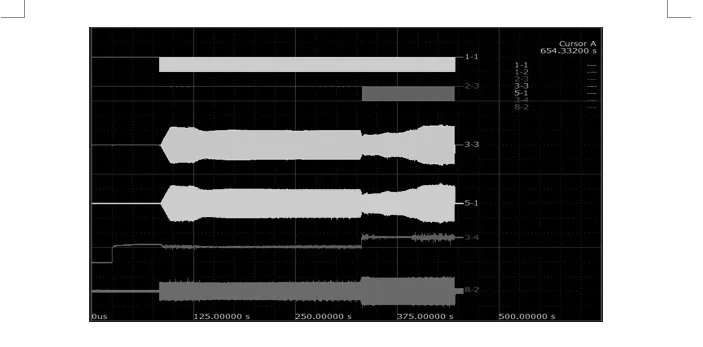
图4 永磁同步电机全速度范围运行波形
图4中,波形由上而下分别为逆变器脉冲、斩波脉冲、U相电流、V相电流、直流母线电压和线电压。电机由牵引状态转成制动状态时,母线电压升高,斩波模块开始运行。
4 结论
本文针对永磁同步电机牵引控制系统展开研究,设计出完整硬件平台,对永磁同步电机控制采用MTPA控制与单Q轴电流调节器弱磁控制结合的方法,实现永磁同步电机全速度范围内的稳定运行。试验结果验证了所采用方法的有效性。
[1]冯江华.轨道交通永磁同步牵引系统研究[J].机车电传动,2010,(05):15-21.
[2]王诗琦.基于TMS320F28335的永磁同步电机矢量控制系统设计[D].大连理工大学,2014.
[3]张伯泽,阮毅.内嵌式永磁同步电机最大转矩电流比控制研究[J].电机与控制应用,2015,(02): 13-15.
[4]罗德荣,杜超,黄守道,郭灯塔.SPMSM非线性调制 区域弱磁控制策略[J].微电机,2013,(09):44-48.
王彬(1978—),男,高级工程师,现从事大功率交流传动控制相关研究和管理工作。
山西省重点研发计划重点项目(201603D111003)。
