基于A R M的飞机导航测距仪L D B-1 0 2监控系统
2017-08-02宁波机场与物流发展集团有限公司陈增杰
宁波机场与物流发展集团有限公司 陈增杰
基于A R M的飞机导航测距仪L D B-1 0 2监控系统
宁波机场与物流发展集团有限公司 陈增杰
本文针对测距仪LDB102监控数据辅助输入输出接口,设计了以ARM7核心的LPC2103芯片进行采集、传输、接收、显示处理,数据传输采用FSK编码的电缆及串口数据转光信号的两种通信方式。该远程监控系统得到了良好应用。
导航设备;远程监控通信;ARM;FSK
0.引言
飞机导航测距仪是一种目前广泛应用的测距设备(以下简称DME),DME设备的作用是提供飞机与地面导航台站的距离,基本原理为通过电磁波传播时间差来测量距离。下滑设备配套的DME设备一般放置在无人值守的导航台站,提供飞机着陆的距离指示。若由于设备故障信息反馈不及时,会引起空中交通安全和航班正点率,因此必须建立可靠的远程监控系统,尤其需保证安全稳定的数据传输通信方式。
1.监控系统的结构及原理
针对上述情况,结合导航台的实际情况,本文给出了实现导航设备测距仪(LDB-102)监控系统的方法,该系统通过光缆或电话线缆建立通信,保障对导航设备DME的控制和监视。导航设备DME(LDB-102)监控系统构成如图1。

图1 导航设备D ME辅助监控系统构成图
导航设备DME(LDB-102)监控系统由导航台和远程监控中心两部分组成。在导航台的下位机主要负责:1、针对导航设备DME(LDB-102),进行状态信号(工作模式、发射状态、电源状态、电池状态等)的采集、控制信号传递;2、针对上位机,进行数据通信。远程监控中心由上位机和监视计算机组成。上位机负责电缆的数据传输、负责向监视计算机传送数据、进行控制信号(开机、主备机切换、关机)的采集、状态信号的显示以及在设备告警时发出声光报警等。监视计算机负责接收数据,保存数据到数据库系统,并在软件界面进行状态显示,以及设备告警时发送短信息至技术人员手机。
此次通过电缆传输的数据信号以频移键控FSK方式进行。FSK(Frequency-shift keying):频移键控,就是用数字信号去调制载波的频率,是信息传输中使用得较成熟的一种调制方式。它是利用基带数字信号离散取值特点去键控载波频率以传递信息的一种数字调制技术。最常见的是用两个频率承载二进制1和0的双频FSK系统,它的主要优点是∶ 实现起来较容易,抗噪声与抗衰减的性能较好,在中低速数据传输中得到了广泛的应用。
2.监控系统的硬件
2.1 监视控计算机系统
现在的计算机性能在处理速度和稳定度上都达到了较好的水平,所以监视计算机用一般的PC机来建立。发送告警短信息的GSM MODEM器件采用华为GTM900 无线模块,此器件是一款三频段 GSM/ GPRS无线模块,它支持标准的 AT命令及增强 AT 命令,提供丰富的语音和数据业务等功能,是数据传输等各种应用的理想解决方案。
2.2 上位机
上位机以ARM7为核心的LPC2103作为中央处理器,包括串口电平转换电路、FSK编码传输电路、状态显示电路、声光告警电路、设备控制电路。LPC2103做串行口的TTL电平需要经过转换才能与RS232接口进行通信,电平转换采用MAX232芯片来实现。电路的FSK编码使用TCM3105芯片进行调制解调。
LPC2103是一个基于16/32位ARM7 TDMI-S CPU的微控制器,并带有32KB的嵌入高速FLASH存储器,128位宽度的存储器接口和独特的加速结构使32位代码能够在最大时钟速率下运行,较小的封装和很低的功耗使LPC2103特别适合于通信网关和协议转换,它内置了宽范围的串行通信接口(2个UART、SPI、SSP和2个I2C)和8KB的片内SRAM[1]。

图2 芯片L P C 2 1 0 3的外围电路及串口电平转换电路
TCM3105芯片是美国TEXASINSTRUMENTS公司生产的单片CMOS工艺的Modem,符合CCITT V.23和BELL202标准,内含基本的调制解调、定时、载波检测,以及群延时均衡等[2],可工作于全双工方式,广泛应用于中、低速数据通信。

表1 T C M3 1 0 5工作模式设置表
系统中设置的FSK编解码工作模式如表1所示,TRS、TXR1和TXR2设置为低电平,即通信波特率为1200的全双工方式,频率1300HZ和2100HZ分别代表“1”、“0”进行编解码。有源滤波器由LM324组成,功能是放大有效信号,过滤无用信号。在电路中采用T1变压器和C7、C8电容,起到隔离直流成分、耦合交流信号功能。具体电路实现如图3所示。
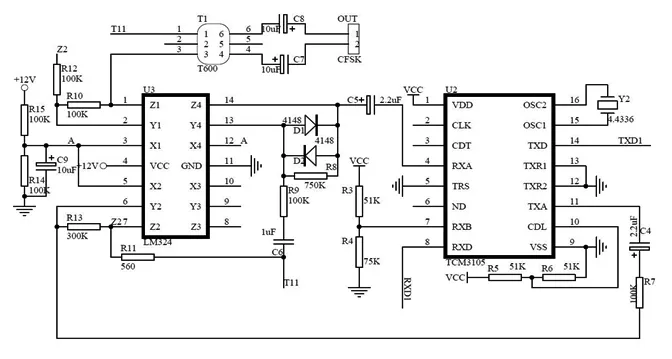
图3 编解码通信电路
2.3 下位机
根据系统功能需要,下位机同样使用LPC2103作为中央处理器,包括串口电平转换电路、FSK编码传输电路、状态采集电路、设备控制信号传输电路。
在信号采集电路中用光电耦合器P521进行电气隔离,采集到的信号通过LPC2103来进行处理。控制设备的接口电路同样通过光电耦合器进行电气隔离和信号放大。串行口的电平转换电路与上位机相同,采用MAX232芯片来实现。
3.程序设计
3.1 下位机的程序实现
在设计中,LPC2103开发选择Keil uVision3平台的编译环境。它是一款集成开发环境,由KeilSoftware公司所推出,拥有灵活的源代码、功能导航器、模板编辑等功能,丰富的配置向导功能以及高速的启动代码和配置文件生成能力。下位机LPC2103的程序流程如图4所示:
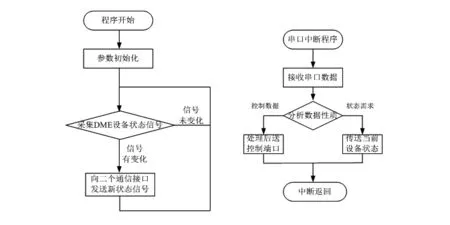
图4 下位机程序流程示意图
下位机的程序有两部分组成:①主程序执行DME设备状态信号的采集分析;②串口中断程序则实时监视串口接收的数据,根据通信的协议判断接收的数据为控制设备的数据还是要求传送当前设备状态的请求信号。对于控制设备的数据则经过转换处理后传送控制信号发送至控制端口;对于请求获取当前设备状态的信号则传送当前DME设备状态。
3.2 上位机软件实现
远程监控中心的LPC2103程序设计与下位机相似,主程序执行设备开关机或转换机控制信号的采集,并以FSK编码方式进行通信。在中断接收程序中,把下位机传送的状态数据通过串口发送至PC机,并体现到LED显示电路,必要时发出声光报警。
3.3 监视计算机软件系统
在PC机上运行的监视软件,采用VC++.NET编程语言开发。软件启动时首先发送信息与下位机进行连接,并显示监视系统主界面。在监视系统主界面视图中,显示当前设备状态和设备历史记录视图。当监视系统收到设备告警信息后,调整设备状态显示界面同时保存记录至ORACLE数据库,发出声音告警,并且通过监控中心的GSM MODEM发送短信息到技术人员手机。短信息告警通知,由监视软件向GSM MODEM使用AT指令来发送。
4.结语
本系统实现了对导航设备DME(LDB-102)的实时监控。在通信方式上采用光缆和电缆两种传输路径,使得监控系统的数据传输通道互为主备。此监控系统经过实践检验,运行基本稳定可靠,通信距离达五公里以上。同时利用GSM MODEM的短信息功能, 使系统在设备告警时自动发送告警短信息给技术员的功能,大大提高了工作效率,减少了人工逐个电话通知的工作量。
[1]周立功.LPC2101_2102_2103中文指南[EB/OL]. http://www.zlgmcu.com,2009(3).
[2]房灿新,张尔杨.基于单片机的低成本远程监控系统[J].信息化研究,2002,28 (7):17-19.
