基于K值分析的路面坑槽面积自动测量
2017-08-01秦忠义
秦 忠 义
(山西公路局长治公路分局,山西 长治 046011)
基于K值分析的路面坑槽面积自动测量
秦 忠 义
(山西公路局长治公路分局,山西 长治 046011)
采用K值分析对路面坑槽面积进行自动计算,通过图像灰度阈值计算,对坑槽特征进行了提取,同时通过像素点数量计算实现面积测量,结果表明该方法具有较高精度,为同类工程提供参考。
路面检测,K值分析,坑槽,灰度阈值
0 引言
坑槽类破损是路面常见病害之一,也是评价路面状况指数(PCI)的重要组成部分,其中评价坑槽对路面性能的衰减作用是通过将坑槽面积来进行衡量的[1-3]。因此,路面坑槽面积进行快速、准确的测量对指导路面的养护、管理及维修具有重要意义[4-6]。
目前采用的人工测量法具有工作量大、精确度低等弊端,与日益增长的公路养护需求不符。因此,国内外诸多学者致力于开发更快、更精确的裂缝检测系统,并且已经取得了较大进展。日本的Komatsu[7]系统使用摄像机进行数据采集,并使用微处理器进行图像处理,初步实现了智能坑槽检测,但该系统只能于夜间工作。美国的阿肯色州大学研制出了一套实时路面坑槽测量系统“数字公路数据车(DHDV)”[8]能够在较高速度下进行路面裂缝的数据采集、识别与分类,但该系统需要超级计算机的辅助,对硬件的要求很高。Bursanescu[9]采用激光传感器对路面进行连续扫描,绘制路表三维可视图,通过对该图处理分析可获得坑槽破损信息,虽然图像不受路面阴影干扰,但缺点是数据量大,对硬件设备要求高。上述方法虽然能进行坑槽面积计算,但是由于识别精度、硬件条件等因素,在工程中未广泛使用。
因此,本文以K值分析为技术手段,通过采集的道路坑槽图片来识别道路坑槽面积。通过图像灰度阈值计算进行坑槽特征提取,同时通过像素点数量计算实现面积测量,实现了坑槽面积的批量自动识别计算。
1 K值分析
1.1 图像采集
在本研究中,图像中坑槽面积与实际面积的比例为1∶4,坑槽图像采集时镜头与路面保持垂直,镜头到路面的距离固定保持不变,图像采集设备参数如图1所示。如图1所示获得的图像尺寸为4096×4096像素点。为便于后续计算和分析,将4096×4096像素点的图像分割为256张256×256像素点的图像,后续坑槽面积计算将各部分面积相加即为坑槽面积。
1.2K均值聚类分析
数码照相机采集到的原始图像为JPEG格式的RGB图像,其中包含色彩信息,对于裂缝特征而言,色彩信息不但没有积极作用还会使图像内感兴趣区域的提取与识别难度增大。考虑到计算机硬件条件限制,去除了原始图像的色彩信息并储存为bmp格式的灰度图像。
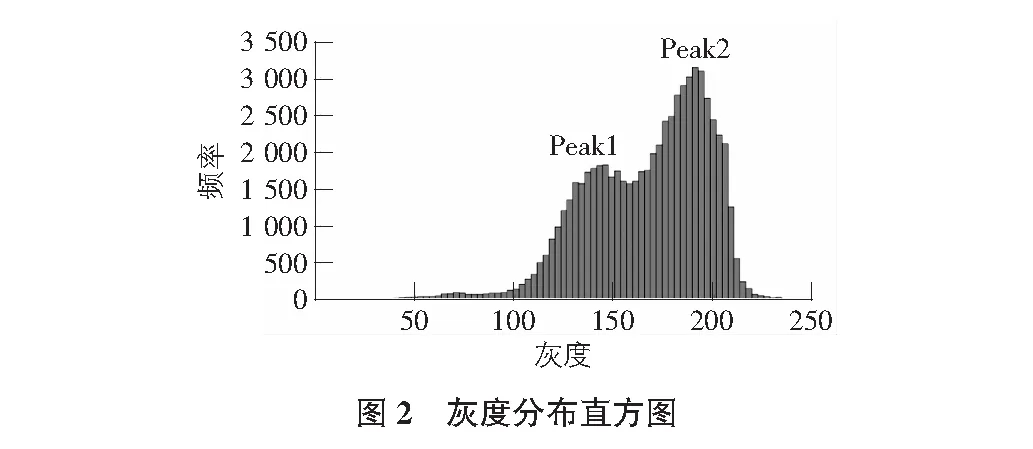
坑槽和平整路面在灰度图中的灰度值存在显著差异,利用灰度值差异来进行裂缝特征预提取是可行的。采用MATLAB软件绘制具有代表性的100张坑槽图像的灰度分布直方图,图2显示其中五张坑槽图像的1张灰度分布直方图。直方图中均出现两处明显波峰Peak1和Peak2。一般认为,以各个波峰作为聚类中心的灰度可作为各组分的灰度范围[10-14]。100张灰度分布直方图值进行K均值聚类分析,获得第一波峰聚类中心平均值为80.59,第二波峰聚类中心平均值为151.81,确定各组分表征形态,给出各组分灰度范围,坑槽50.05~110.14,路面110.14~250。
1.3 特征提取
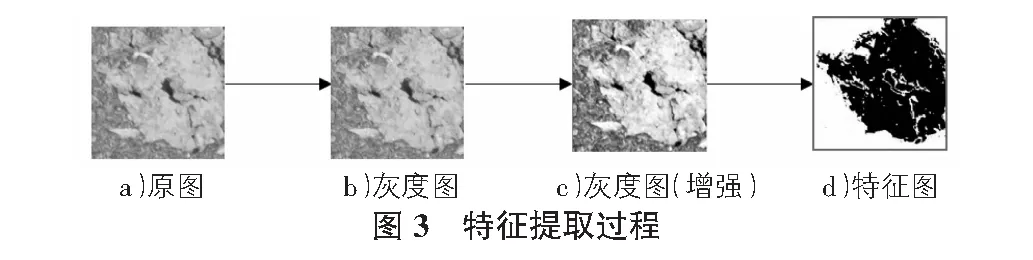
对1.2中的灰度图进行特征提取,目的是保证图像中仅表现出坑槽形态和尺寸等基本特征,步骤如下:
1)缩减灰度范围,突出了坑槽形态和形状等基本要素,其结果见图3c);2)输入灰度范围50.05~110.14,对图像进行划分,其结果见图3d);3)坑槽图像保存。
图3a),图3d)对比可见,该灰度阈值下的组分划分细节表达清晰,未改变坑槽面积等基本要素,因此可采用该灰度阈值作为批量特征提取的依据。
2 结果与讨论
本文采集了山西省境内四条高速公路的坑槽类病害图像,采集过程保证图像中坑槽面积与实际面积的比例为1∶4,坑槽图像采集时镜头与路面保持垂直,镜头到路面的距离固定保持不变。对采集到的图像进行K值分析和特征提取,之后依据像素点的数量反算坑槽面积。最后将算法计算结果和实际路面检测结果进行分析,部分结果如表1所示。结果表明K值分析的误差率控制在10%以内,完全符合我国公路路面检测的需求[15]。同时K值分析大幅减少了检测需要的时间,减少人工测量的主观性干扰,在未来的自动化检测中具有较高的运用价值。

表1 K值聚类分析部分结果

3 结语
本文采用K值分析对路面坑槽面积的自动计算。通过图像灰度阈值计算进行坑槽特征提取,同时通过像素点数量计算实现面积测量,可得出如下结论:
1)实现了自动路面坑槽面积自动测量算法的实现。路面坑槽检测图像被作为样本进行特征处理。通过图像采集,K值聚类分析和特征提取可以批量进行坑槽长度测量,结果表明K值分析的坑槽面积计算准确率为94.36%,最大长度误差为10 mm2,基本满足工程要求。
2)通过灰度处理,图像中坑槽的形状、几何尺寸等重要特征被保留。同时大量无用的信息,如外界阴影、路面纹理等被除去,提高了坑槽面积测量的精度。
3)通过K值聚类分析给出了沥青路面坑槽提取过程中各组分的灰度参考值,坑槽50.05~110.14,路面110.14~250。
4)本文设计的K值分析仅针对了山西省AC-16的沥青路面,未来应对不同材料路面进行K值分析,进一步验证算法的准确性。
[1] 田耀刚,延丽丽,陈长征,等.材料模量对沥青路面坑槽修补结构力学性能影响分析[J].武汉理工大学学报,2013(11):58-62.
[2] 郝尧生,刘兴东.高速公路沥青路面坑槽病害成因与处治[J].中外公路,2012(3):118-120.
[3] 刘海苹,杨 扬,董希斌.冷补沥青混合料在路面坑槽修补中的运用[J].森林工程,2006(2):36-38.
[4] 茅 荃.沥青混凝土路面坑槽修补技术研究[J].公路,2004(10):158-163.
[5] 康敬东,孙祖望.沥青混凝土路面坑槽修补机理分析[J].公路,2003(12):112-115.
[6] 申爱琴.路面坑槽形成原因的力学分析[J].西安公路交通大学学报,1995(1):12-15,85.
[7] Toshihiko Fukuhara,Keiji Terada,Makoto Nagao,etc..Automatic Pavement-Distress-Survey System [J].Journal of Transportation Engineering,1990,116(3):280-286.
[8] Wenting Luo,Lin Li,Kelvin.C.P.Wang.Automated pavement horizontal curve measurement methods based on inertial measurement unit and 3D profiling data[J].Journal of Traffic and Transportation Engineering (English Edition),2016,3(2):137-145.
[9] Liviu Bursanescu,Francois Blais.Automated pavement distress data collection and analysis:a 3-D approach[J].Digital Identity Management,1997,13(2):1-11.
[10] Della Bona,.Three-dimensional finite element modelling of all-ceramic restorations based on micro-CT[J].Journal of Dentistry,2013,41(5):412-419.
[11] 王敬贵,亢 庆,邝高明,等.尖山河小流域土壤可蚀性K值空间变异研究[J].生态环境学报,2014(4):555-560.
[12] 史东梅,陈正发,蒋光毅,等.紫色丘陵区几种土壤可蚀性K值估算方法的比较[J].北京林业大学学报,2012(1):32-38.
[13] 张金池,李海东,林 杰,等.基于小流域尺度的土壤可蚀性K值空间变异[J].生态学报,2008(5):2199-2206.
[14] 杨善林,李永森,胡笑旋,等.K-MEANS算法中的K值优化问题研究[J].系统工程理论与实践,2006(2):97-101.
The automatic measurement of pavement pit area based onKvalue analysis
Qin Zhongyi
(ChangzhiHighwayBranch,ShanxiHighwayBureau,Changzhi046011,China)
This paper made automatically calculation to pavement pit area using theKvalue analysis, through the image gray threshold calculation, extracted the pit characteristics, at the same time, through the quantity calculation of pixel points to achieve the area measurement, the results showed that this method had good accuracy, provided reference for similar engineering.
pavement detection,Kvalue analysis, pit, gray threshold
1009-6825(2017)18-0139-02
2017-03-29
秦忠义(1977- ),男,工程师
U416.2
A
