防空高炮对RAM弹类目标跟踪射击可行性分析
2017-08-01王海宁刘序旻张瑶瑶
王海宁,刘序旻,张瑶瑶,王 军
(1.南京理工大学自动化学院, 南京 210094; 2.中国船舶工业集团公司 第708研究所, 上海 200011;3.中国酒泉卫星发射中心, 甘肃 酒泉 732750)
防空高炮对RAM弹类目标跟踪射击可行性分析
王海宁1,刘序旻2,张瑶瑶3,王 军1
(1.南京理工大学自动化学院, 南京 210094; 2.中国船舶工业集团公司 第708研究所, 上海 200011;3.中国酒泉卫星发射中心, 甘肃 酒泉 732750)
根据弹箭外弹道方程生成RAM类弹的实际飞行轨迹,针对不同速度RAM弹类目标类抛物线飞行轨迹特性,从防空高炮提前跟踪角速度方面考虑,给出了防空高炮随动系统无法及时跟踪RAM类弹目标的射击死区。射击死区受RAM类弹目标的飞行速度与航迹捷径影响,高炮容易出现提前方位角跟踪角速度上的射击死区。
防空高炮; RAM类弹; 提前跟踪角速度; 射击死区
zone
现阶段RAM类弹(火箭弹、迫击炮弹、榴弹的总称)正成为军事落后国家或者武装分子对付西方发达国家军队的强有力武器。如何对付这些粗糙的低成本武器,正成为伊拉克,以色列等国最关心的军事问题。本文从防空高炮随动系统跟踪射击可行性角度出发,分析了采用防空高炮反RAM类弹射击可行性。
对于防空高炮随动系统跟踪射击可行性的研究,文献[1-6]给出了将跟踪目标假定为匀速直线飞行时的研究方法。对于跟踪目标为RAM类弹,其类抛物线的弹道轨迹特点跟踪射击可行性的研究,未见相关文献。现今RAM类弹在弹形、弹壳材料以及药筒内发射药的改进使RAM类弹的初速比过去有了很大的提升,因此需要进行防空高炮对于飞行速度为300~1 500 m/s的RAM类弹射击可行性分析。
1 RAM类弹目标弹道轨迹仿真
要精确的建立RAM类弹的理论弹道方程需要考虑各种因素的影响,如:气压、气温、科式惯性力、风的分布、作用在弹箭上的空气动力、弹、弹的质量分布等。上述有些影响因素在RAM类弹实际飞行过程中的影响很小,如科式惯性力,有些因素在标准条件下不需要考虑或可以忽略,为了便于分析,本文研究标准条件下弹箭质心运动方程组及其弹道特性。文献[7]给出了标准条件下弹箭质心运动方程组:
(1)
通过上述标准条件下弹箭质心运动方程组可以得到RAM类弹在标准条件下的仿真弹道轨迹,并且假定:火炮与火箭弹发射器位于坐标原点处,射角为45°,射击方向沿X轴正向,文献[8-10]给出了迫击炮弹、榴弹、火箭弹的飞行速度。RAM类弹标准条件下的弹道轨迹仿真如图1、图2、图3所示。
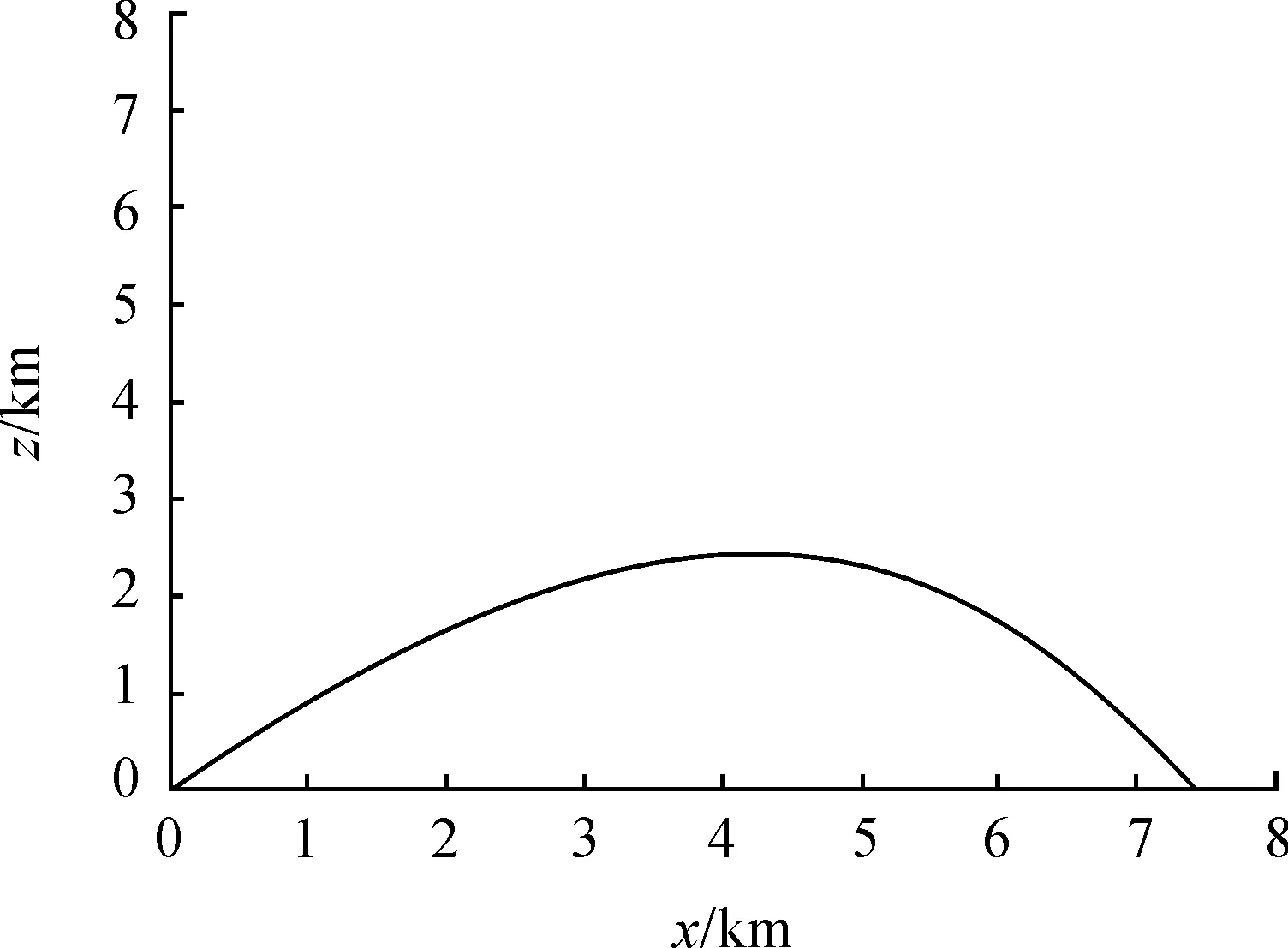
图1 迫击炮弹初速为300 m/s时的弹道轨迹

图2 榴弹初速为900 m/s时实际弹道轨迹
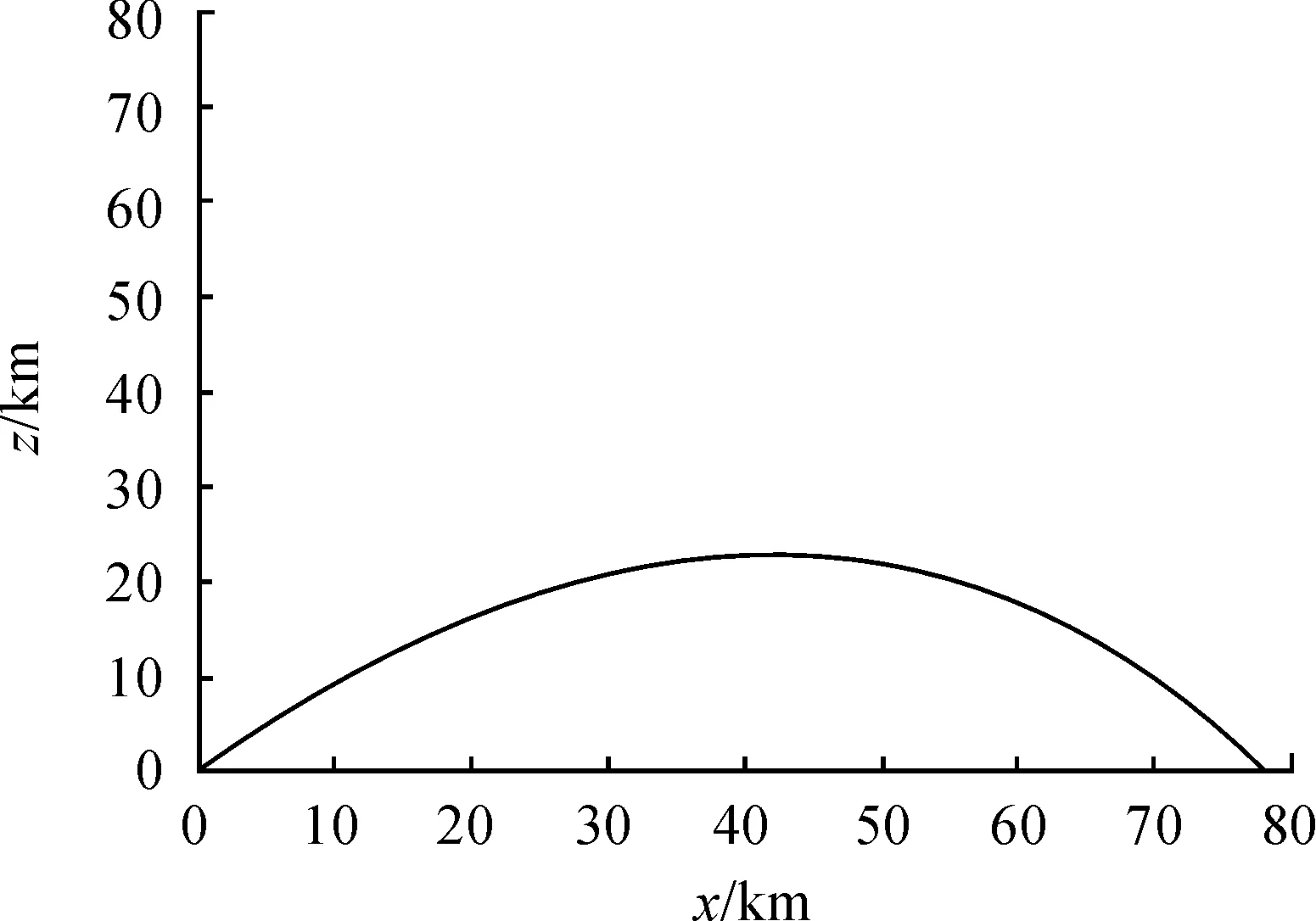
图3 火箭弹最大速度为1 000 m/s时实际弹道轨迹
2 防空高炮随动系统跟踪可行性研究
2.1 防空高炮提前跟踪角速度数学推导
本文从防空高炮提前跟踪角速度来分析防空高炮对于飞行速度为300~1 500 m/s的RAM类弹目标的射击可行性,为了使分析得到简化,假定RAM类弹目标沿与X轴平行的逆向来袭,防空高炮的炮口位于坐标原点处,具体如图4所示。
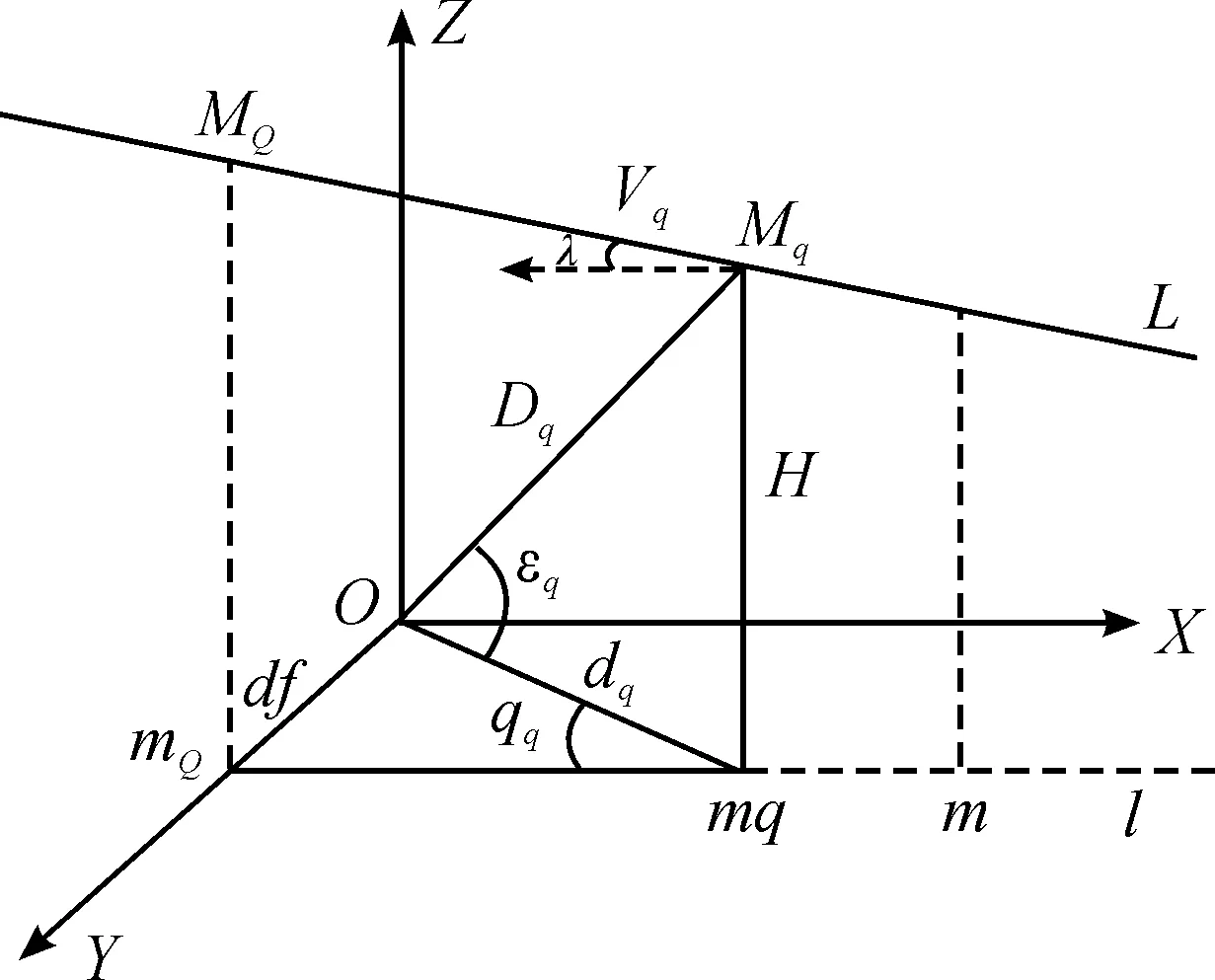
图4 确定目标的提前点坐标
图4中,M为目标现在点的坐标,Mq为目标提前点的坐标,mq为目标提前点在水平面上的投影,Dq为炮口位置O到目标的斜距离,H为目标提前点高度,dq为目标提前点到炮口位置O在炮口水平面上的距离,dj为目标航迹捷径,它是炮口位置O至航路L在炮口水平面上的投影l的最短距离,lq为目标提前点在炮口水平面上的点到航迹捷径点的距离,εq为目标提前点高低角,vq为目标提前点处的速度矢量,qq航路角为vq在炮口水平面上的投影矢量与水平距离的夹角,λ倾斜角为vq与炮口水平面的夹角。
将图4中到目标提前点Mq部位放大,如图5。由图5计算提前点移动速度相应的提前角速度。
由图5可得:

(2)

(3)
式(2)、式(3)中,ωβq为提前方位角跟踪角速度,ωεq为提前高低角跟踪角速度,L为航路方向,Bq为与提前水平距离线相垂直并水平指向左方,Eq为在铅直面内与提前斜距离线相垂直并指向上方,文献[6]给出了cos〈L,Bq〉与cos〈L,Eq〉的计算公式:
cos〈L,Bq〉=cosλsinqq
(4)
cos〈L,Eq〉=cosλcosqqsinεq+sinλcosεq
(5)
故有:

(6)

(7)
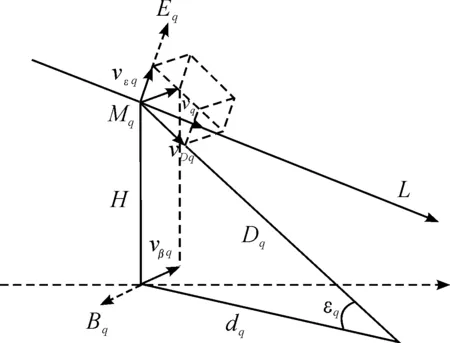
图5 提前点移动速度相应的提前角速度
2.2 提前角速度变化仿真结果
分析当火控雷达发现RAM类弹目标的起始速度分别为:300 m/s、600 m/s、900 m/s、1 200 m/s、1 500 m/s时,防空高炮提前方位角跟踪角速度ωβq与提前高低角跟踪角速度ωεq在不同航迹捷径dj下的变化情况,高炮的提前方位角最大跟踪角速度与提前高低角最大跟踪角速度为0.52 rad/s[1],跟踪过程发生在RAM类弹目标的下落段。
防空高炮由于提前跟踪角速度大于提前最大跟踪角速度而出现的射击死界对应于lq上的区域为:沿提前跟踪角速度与提前最大跟踪角速度的交点作与纵轴的平行线,该线与横轴的相交点为目标航路上的射击死界边界点。
1) 高炮提前方位角跟踪角速度仿真变化情况如图6:
①dj=100 m时,提前方位角跟踪角速度随lq的变化曲线如图6(a)。
②dj=500 m时,提前方位角跟踪角速度随lq的变化曲线如图6(b)。
③dj=1 000 m时,提前方位角跟踪角速度随lq的变化曲线如6(c)。
由上述仿真结果可得:同一航迹捷径下,RAM类弹目标的速度越快,高炮的提前方位角跟踪角速度越大,对应于lq上的射击死界范围越大;同一速度下,dj越大,高炮的提前方位角跟踪角速度越小,对应于lq上的射击死界范围越小。
2) 高炮提前高低角跟踪角速度仿真变化情况如图7:
①dj=0 m时,提前高低角跟踪角速度随lq的变化曲线如图7(a)。
②dj=200 m时,提前高低角跟踪角速度随lq的变化曲线如图7(b)。
③ dj=400 m时,提前高低角跟踪角速度随lq的变化曲线如图7(c)。

图6 高炮提前方位角跟踪角速度仿真变化情况

图7 高炮提前高低角跟踪角速度仿真变化情况
由上述仿真结果可得:同一航迹捷径下,RAM类弹目标的速度越快,高炮的提前高低角跟踪角速度越大,对应于lq上的射击死界范围越大;同一速度下,dj越大,高炮的提前高低角跟踪角速度越小,对应与lq上的射击死界范围越小。并且可以得出防空高炮对RAM类弹目标进行射击时,更容易出现提前方位角跟踪角速度上的射击死区。
对于高炮提前高低角跟踪角速度仿真结果中图形出现关于lq=0不对称的原因,可以从RAM类弹目标类抛物线飞行轨迹的特点与高低角计算公式得出。针对RAM类弹目标类抛物线飞行轨迹的特点,当弹道方程解耦到各个坐标轴上如式(1)所示时,RAM类弹目标在Z轴上受重力加速度的影响导致其下落速度不断增大,假定dj=200 m一定时,对于不同起始速度,高低角εq随lq的变化规律如图8所示。

图8 防空高炮高低角随lq的变化
由图8可得,防空高炮高低角在航后(lq=0~-1.5×104m)的变化范围要大于航前(lq=0~1.5×104m)的变化范围,由于仿真时对目标航前与航后的跟踪时间相同,因此高炮航后提前高低角角速度应大于其航前提前高低角角速度,并且这种现象对于做类抛物线飞行的目标影响更为显著,故出现提前高低角角速度仿真结果中图形关于lq=0不对称现象。
对于提前高低角角速度仿真结果中图形在dj为零与非零时不一致,可以从qq的定义与取值范围以及式(7)给出解答:航路角qq为目标提前点速度矢量在炮口水平面上的投影向量与水平距离的夹角,它的变化范围是0°~180°:
① 当qq<90°时,目标临近飞行;
② 当qq>90°时,目标远离飞行;
③ 当目标过顶飞行时,航前qq≡0°,航后qq≡180°。
由此可知当dj=0时,即目标过顶飞行,在航前与航后存在航路角qq跳变的过程,结合式(7)可得其值会在lq=0处出现跳变。
3 结论
防空高炮在对RAM类弹目标进行跟踪射击时,建议防空高炮采用拦阻射击方式,射击死区对应于lq上的区域范围受RAM类弹目标的飞行速度与航迹捷径影响:同一航迹捷径下,RAM类弹目标的速度越快对应于lq上的射击死界范围越大;同一速度下,dj越大对应与lq上的射击死界范围越小。由仿真结果,防空高炮容易出现提前方位角跟踪角速度上的射击死区。
[1] 李银伢,陈黎,戚国庆,等.高炮对超高速目标射击死界与射击时限的研究[J].兵工学报, 2009,30(6):663-667.
[2] 魏朝阳,臧文利,江金龙.高炮对任意速度目标极限射击死界的研究[J].兵工学报,2008,29(11):1296-1302.
[3] 薄煜明,郭治,杜国平,等.高炮与防空导弹在近程防空反导中的互补性[J].兵工学报,2002,23(2):164-165.
[4] 王艳霞,郭治,张贤椿,等.高射的禁止射击区域[J].火力与指挥控制,2009,34(5):28-30.
[5] 郭治.现代火控理论[M].北京:国防工业出版社,1996.
[6] 薄煜明,郭治,钱龙军,等.现代火控理论与应用基础[M].北京:科学出版社,2012.
[7] 韩子鹏.弹箭外弹道学[M].北京:北京理工大学出版社,2014.
[8] 高敏,张强.迫击炮弹外弹道辨识方法[J].探测与控制学报,2003,25(1):7-10.
[9] 周全,曲玉琨,钟良海,等.某新型榴弹炮火控系统效能分析[J].四川兵工学报,2010,31(10):22-24.
[10]张明星,黄晓霞.国外远程制导火箭弹技术现状与趋势[J].四川兵工学报,2013,34(7):59-63.
(责任编辑 周江川)
Tracking Feasibility Analysis of Antiaircraft Gun Against the Projectile of RAM
WANG Haining1, LIU Xumin1, ZHANG Yaoyao3, WANG Jun1
(1.School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China; 2.China State Shipbuilding Corporation 708thResearch Institute, Shanghai 200011, China; 3.China Jiuquan Satellite Launch Center, Jiuquan 732750, China)
Based on the trajectory equation of projectile and rocket, the actual flight trajectory of RAM projectile is generated. Aiming at the characteristics of parabolic flight trajectory of RAM projectile with different velocities, and from advance tracking angular velocity of antiaircraft gun, this paper gave the shooting dead zone of antiaircraft gun servo system and the shooting dead zone that cannot be timely tracking the projectile of RAM. The influence of the flight speed and the short path of RAM projectile on the shooting dead zone and the gun is more prone to advance azimuth tracking angular velocity on the shooting dead zone.
antiaircraft gun; the projectile of RAM; advance tracking angular velocity; shooting dead
10.11809/scbgxb2017.07.021
2017-03-15;
2017-04-20
十三五装备预先研究基金项目(30101040204);上海航天科技创新基金项目
王海宁(1991—),男,硕士研究生,主要从事毁伤效能分析研究。
format:WANG Haining, LIU Xumin, ZHANG Yaoyao, et al.Tracking Feasibility Analysis of Antiaircraft Gun Against the Projectile of RAM [J].Journal of Ordnance Equipment Engineering,2017(7):94-97.
TJ35
A
2096-2304(2017)07-0094-04
本文引用格式:王海宁,刘序旻,张瑶瑶,等.防空高炮对RAM弹类目标跟踪射击可行性分析[J].兵器装备工程学报,2017(7):94-97.
