基于RBF-ARX模型的倒立摆系统的预测控制∗
2017-08-01刘丽丽左继红吴军廖娟娟
刘丽丽 左继红 吴军 廖娟娟
(1.中南大学信息科学与工程学院长沙410083)(2.湖南铁道职业技术学院株洲412001)
基于RBF-ARX模型的倒立摆系统的预测控制∗
刘丽丽1,2左继红1,2吴军1廖娟娟1
(1.中南大学信息科学与工程学院长沙410083)(2.湖南铁道职业技术学院株洲412001)
针对倒立摆系统的高阶次、非线性和强耦合特性,导致难以建立准确的数学模型,针对这个难题,提出了基于RBF-ARX模型的预测控制算法。该建模方法结合了线性自回归模型和高斯径向基函数的理论,通常用于构建非线性系统的模型。预测控制算法采取RBF-ARX模型多步向前预测输出,并反馈到输入端,根据参考轨迹进行校正,使误差最小。该法首先构建倒立摆系统的RBF-ARX模型结构,然后辨识并优化模型参数。基于此模型采取预测控制算法控制倒立摆系统,最后通过仿真控制效果验证了该方法的可行性和有效性。
倒立摆系统;RBF-ARX模型;预测控制
Class NumberTP391.9
1 引言
倒立摆系统是一个多变量、高阶次和强耦合非线性系统,一直是自动控制领域研究的热点和难点问题[1]。可以用其验证控制策略对非线性系统的控制效果,广泛应用于自动化领域,对其研究具有重要的理论价值和工程参考价值。目前对倒立摆系统的研究主要集中在建模和控制策略方面。建模多采用拉格朗日法或牛顿-欧拉法,此类建模通过研究倒立摆系统运动机理,不考虑倒立摆运动过程中空气阻力及各种摩擦力,利用物理、化学和数学知识,构建系统输入-输出状态关系。这种建模方法忽视客观存在的非线性因素,导致模型不够精确。目前对倒立摆系统控制方法的研究有经典的PID控制,通过运动机理构建系统动力学模型,线性化处理得到系统状态输出方程,利用PID控制理论实现控制[2]。也有学者通过状态输出方程,采取状态反馈理论和Kalman滤波相结合的方法[3],实现倒立摆系统的控制。采取模糊控制理论,根据倒立摆运动输出定义模糊集合和隶属函数等,并构建模糊规则[4],实现倒立摆系统的闭环模糊控制。采取神经网络理论控制倒立摆系统[5]。
2 倒立摆控制系统
本文研究的倒立摆系统由固高公司生产,实验平台主要包括倒立摆本体、电控柜、运控卡、及PC机,系统框图如图1所示。

图1倒立摆实验平台结构框图
倒立摆本体主要包含:基座、交流伺服电机、同步带、摆杆、角度编码器和限位开关等。电控柜主要由I/O接口板、电源开关、指示灯等构成。PC机和固高运动控制卡构成控制平台。倒立摆控制系统硬件框图如图2所示。运控卡控制伺服电机,通过同步带控制小车在导轨上往返运动。光电编码器1反馈小车的位移信息,光电编码器2反馈摆杆的角度信息给运控卡。PC机读取运控卡中实时数据信息,通过一定的控制策略得到电机的目标输出扭矩,并发指令给运控卡,最终控制电机按照目标扭矩转动,带动小车运动,并保持摆杆处于平衡状态。
3 倒立摆系统的RBF-ARX模型
3.1 RBF-ARX模型简介
RBF-ARX模型是一个全局状态下的非线性模型,它结合了线性自回归(Auto-Regressive eXoge⁃nous,ARX)模型和高斯径向基函数(Radial Basis Function,RBF),适用于非线性系统的建模,实际上是将非线性过程局部线性化处理,将非线性过程划分成无数个局部线性区间,每个区间可用线性ARX模型表示。采用神经网络RBF逼近非线性模型中依存于时变工作点的函数型系数,这样RBF-ARX模型可以描述非线性系统在任意工作点处的动态非线性特征。
3.2 倒立摆系统的RBF-ARX模型结构
针对1输入2输出的倒立摆系统,其RBF-ARX模型结构如式(1)所示:
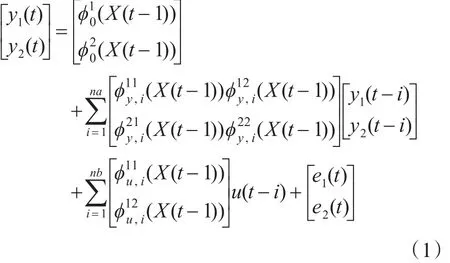
其中,

式(1)中y1(t)、y2(t)分别是小车的位移量和摆杆的角度,u(t-i)是电机输出电压,na,nb表示模型阶次;m为非线性环节数。e1(t),e2(t)为白噪声干扰项。

式(2)中Zk=(zk,1,zk,2,…,zk,nx)T;j=1,2;p,q,b=1,2;a=1;nx=dim{X(t-1)}为X(t-1)列向量的维数,λikj(k=1,…,m;i=y,u;j=1,2)是缩放比例因子:(k=1,2,…,m;j=1,2),Z(k=1,2,…,m;j=1)是RBF网络的中心;||.||2代表矢量的2-范数。ϕ0j,和(p,q,b=1,2;a=1)是依存于系统状态变化的模型系数,和p,q,b=1,2; a=1;i=0,1,…,max(na,nb);k=0,1,…,m)为线性权系数。
式(2)中的X(t-1)的选择主要取决于倒立摆系统非线性的因素,可以是输出序列,或是输入序列,或是二者组合。在倒立摆系统运行过程中,非线性因素主要表现在摆杆的角度上,故X(t-1)选择式(3)所示的输出信号y2(t)序列。

其中kd是系统的最大延时。
3.3 模型参数辨识
RBF-ARX模型参数辨识主要包括参数估算和阶次选取。因经典的非线性参数辨识方法计算量大,故本文采用一种快速收敛的结构化非线性参数优化策略(SNPOM)[6]来离线估算。SNPOM采用线性LSM[7](线性最小二乘法)和LMM[8](列文伯格-马夸尔特法)相结合辨识RBF-ARX的模型参数。
SNPOM离线估算的方法是把参数划分成线性和非线性参数,在非线性子空间中寻优方法类似于LMM,在线性子空间寻优采用LSM。这种优化方法步骤如下:
1)分类参数
将模型参数分成线性参数

非线性参数

令:

模型(1)可化为

2)寻优问题
首先确定模型阶次,m一般选取1或2。采用AIC信息准则方法确定na,nb:

式(8)中V为模型残差,N为采集数据个数,d为非线性和线性参数个数之和。针对本文研究对象,线性参数个数为2(m+1)(2*na+nb+1),非线性参数个数为2m(1+nx)。循环计算使上式AIC最小时的na,nb,即为所求模型阶次。
寻优目标函数定义为[1]


寻优问题就是计算

通过上述方法,可辨识得到倒立摆系统RBF-ARX模型的参数。实践证明,该辨识方法具有收敛快速,精度高等显著特点。
3.4 参数辨识结果分析
通过AIC方法计算得到na=5,nb=5,nX=3。采用SNPOM参数寻优法来优化参数,优化过程如图2所示,从图2可看出在11步时参数已经达到最优状态,表明SNPOM法收敛速度快。

图2RBF-ARX模型参数优化过程
为了检验RBF-ARX模型的建模精度,比较系统在全局区间运行时模型输出与系统实际输出,并计算两者间的误差及其相关函数。模型输出误差如图3所示,误差的相关函数如图4所示。
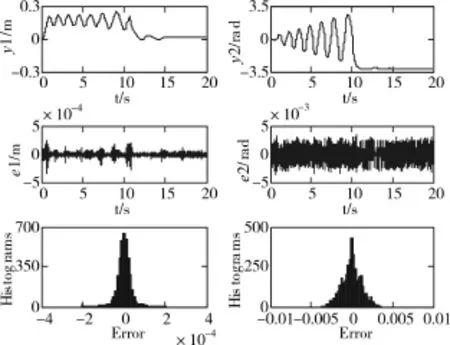
图3RBF-ARX模型预测输出及误差

图4RBF-ARX模型预测误差的相关函数
显然,全局区间内RBF-ARX模型输出与实际输出之间的误差比较小,近似白噪声,表明该建模方法能较好描述系统在全局区间内的动态非线性特征。
4 基于RBF-ARX模型的预测控制器的设计
4.1 控制器设计框图
基于RBF-ARX模型设计系统预测控制器,采用闭环输出预测控制算法,算法设计框图如图5所示。RBF-ARX模型局部处理成线性化的ARX模型。采取二次规划策略计算控制器的最优预测输出,并计算与系统实际输出之间的误差,并将误差反馈给输入端,并依据参考轨迹校正,使系统预测输出接近参考轨迹,优化目标函数,计算出控制量用于控制系统[9]。
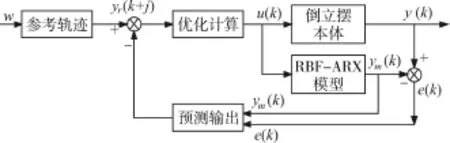
图5RBF-ARX模型下预测控制器设计框图
4.2 基于RBF-ARX模型的预测控制算法
基于RBF-ARX模型的预测控制算法,采用矢量和矩阵表示,先定义:

其中N为预测时域,Nu为控制时域,Yr(t)是期望输出序列[10],定义

优化问题是

将式(12)带入式(13),消去常数项,式(13)所示的优化问题可转化成:

式(14)所示优化问题可以用二次规划求解。实践表明,若不考虑输出,只考虑输入限制,可以不使用二次规划,并可得到控制量u(t)如下式[11]4.3预测控制结果分析

通过仿真实验,检验预测控制算法的控制效果,为方便实际应用,尽量减少计算量,要求N和Nu尽可能小。设定采样周期5ms,基于RBF-ARX模型预测控制器(RBF-ARX MPC)的预测时域长度N取5,控制时域长度Nu取2。仿真控制效果如图6~10所示。

图6基于RBF-ARX预测控制输出y1效果
从图6可看出基于RBF-ARX预测控制中y1在1s内稳定到参考输出,响应迅速,稳定后误差也比较小。图7显示基于RBF-ARX预测控制中输出y2角度值,响应快,稍有震荡和超调。
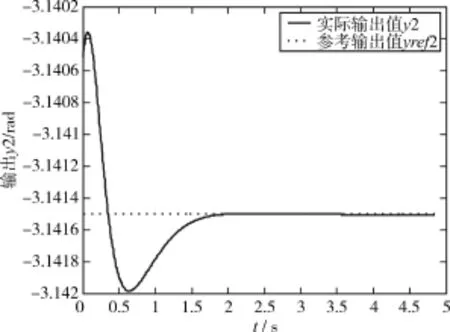
图7基于RBF-ARX预测控制输出y2效果
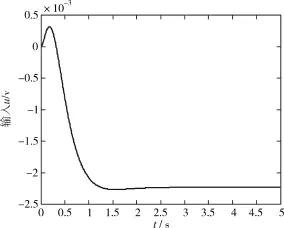
图8基于RBF-ARX预测控制输入u曲线图
从图8看出,预测控制输入电压u在很短时间内基本达到稳定状态,证明基于RBF-ARX预测控制对倒立摆系统控制是可行的,并且控制效果优良。
为进一步验证基于RBF-ARX模型预测控制的控制效果,比较倒立摆在稳摆阶段局部和全局工作区间内的系统实际输出与模型预测输出,并计算两者之间的局部误差和全局的平均误差。

图9预测控制局部输出误差图
如图9,10,输出y1模型输出和实际输出误差在-0.035左右,除了控制算法外,也和倒立摆自身特性有关,倒立摆本体只有水平往返运动,摆杆才能获得动能稳定在平衡位置处。输出y2模型的预测输出能很好地拟合系统的实际输出值,稳态后误差也比较小。总体来看,倒立摆运行区间基于RBF-ARX模型的预测控制输出的误差比较小,模型预测输出能很好的吻合系统实际输出,控制精度高。
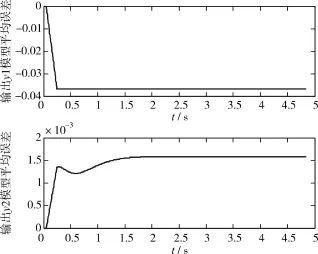
图10预测控制全局输出误差图
5 结语
针对不稳定、高阶次、非线性和强耦合的倒立摆系统,提出了基于RBF-ARX模型的预测控制算法。根据系统输入输出情况构建RBF-ARX模型,并采用SNPOM分类离线辨识及优化模型参数,基于该模型设计了系统预测控制器。仿真结果表明,模型预测输出能很好的拟合系统实际输出,两者之间的误差也比较小,验证了该方法在非线性系统建模和控制方面的可行性和有效性。
[1]J.A.K.Suykens,J.Vandewalle,B.De Moor,Optimal control by least squares support vector machines[J].Neural Net⁃works,2001,14:23-35.
[2]黄永宣.自动平衡倒置摆系统-一个有趣的经典控制理论教学实验装置[J].控制理论与应用,1987,4(3):92-95. HUANG Yongxuan.Automatic balance inversion sys⁃tem-an interesting teaching experimental device of classi⁃cal control theory[J].Control theory and application,1987,4(3):92-95.
[3]刘珊中,朱邦太,牛新闻.状态反馈控制在二级倒立摆平衡系统中的应用[J].洛阳工学院学报,1999,14(1):36-40. LIU Shanzhong,ZHU Bangtai,NIU Xinwen.The applica⁃tion of state feedback control in double inverted pendulum system[J].Journal of Luoyang institute of technology,1999,14(1):36-40.
[4]李士勇.模糊控制神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,1998:133-140. LI Shiyong.fuzzy control neural control and intelligent con⁃trol theory[M].Harbin:Press of Harbin institute of tech⁃nology,1998:133-140.
[5]蒋国飞,吴沧浦.基于Q学习算法和BP神经网络的倒立摆控制[J].自动化学报,1998,24(5):662-666. JIANG Guofei,WU Cangpu.Inverted pendulum control based on q-learning algorithm and BP neural network[J]. Acta automatica sinica,1998,24(5):662-666.
[6]Hui Peng,Tohru Ozaki,Valerie Haggan-Ozaki,Yukihi⁃ro Toyoda.A Parameter Optimization Method for Radial Basis Function Type Models[C]//IEEE Transactions on Neural Networks,MARCH,2003:432-438.
[7]苏迪前,饶立昌,柴天佑.自适应控制[M].沈阳:东北大学出版社,1993,12:23-35. SU Diqian,RAO Licang,CAI Tianyou.Adaptive control[M].Shenyang:Press of northeastern university,1993, 12:23-35.
[8]D.Marquart.An algorithm for least-squares estimation of nonlinear parameter[J].SIAM J Appl.Math.,1963,11(2):431-441.
[9]李翔,陈增强,袁著祉.基于神经网络的非线性前馈补偿广义预测自校正控制器51[J].南开大学学报,1999,32(2):51-55. LI Xiang,CHEN Zengqiang,YUAN Zhuzhi.Generalized predictive self-tuning controller 51 of nonlinear feedfor⁃ward compensation based on neural network[J].Journal of Nankai university,1999,32(2):51-55.
[10]王磊,戴冠中.基于BP算法的自适应模糊控制系统研究[J].控制理论与应用,1996,13(6):797-801. WANG Lei,DAI Guanzhong.Researth of adaptive fuzzy control system based on BP algorithm[J].Control theory and application,1996,13(6):797-801.
[11]Q.Wei,W.P.Dayawansa,W.S.Levine,Nonliner controller for an inverted pendulum having restricted travel,Auto⁃matica,1995,31(6):841-850.
Predictive Control for An Inverted Pendulum System Based on RBF-ARX Mode
LIU Lili1,2ZUO Jihong1,2WU Jun1LIAO Juanjuan1
(1.School of Information Science and Engineering,Central South University,Changsha410083)(2.College of Hunan Railway Professional Technology,Zhuzhou412001)
The Inverted Pendulum System which is high order,nonlinear and coupled with each other makes it difficult to es⁃tablish accurate mathematical model,for the problem,the design of predictive control algorithm based on RBF-ARX model were discussed.This modeling method is a combination model based on the theory of linear autoregressive(Auto-Regressive eXogenous,ARX)model and Gauss radial basis function(Radial Basis Function)neural network(RBF),it is used to construct the model of nonlinear system usually.Predictive control algorithm uses RBF-ARX model to predict multi-step's output forward,and feedback to the input in order to minimize the error according to the reference trajectory correction.The structure of the Inverted Pendulum System's RBF-ARX model is built firstly,then the model's parameters are identified and optimized.Take predictive control algo⁃rithm to control the inverted pendulum system based on this model,the simulation results verify the feasibility and validity of the method.
inverted pendulum system,RBF-ARX model,predictive control
TP391.9
10.3969/j.issn.1672-9722.2017.07.020
2017年1月7日,
2017年2月19日
2015年度湖南省教育厅科学研究资助项目“四旋翼飞行器的建模及控制策略的研究”(编号:15C0903);2015年度国家自然科学基金“抗参数横揺的欠驱动船舶航迹跟踪控制研究”(编号:61403045)资助。
刘丽丽,女,硕士研究生,工程师,研究方向:控制科学与工程等。左继红,男,硕士研究生,讲师,研究方向:控制科学与工程等。