水上运动船舶的检测与跟踪∗
2017-08-01蔡丹段先华高海壮
蔡丹 段先华 高海壮
(江苏科技大学计算机科学与工程学院镇江212003)
水上运动船舶的检测与跟踪∗
蔡丹 段先华 高海壮
(江苏科技大学计算机科学与工程学院镇江212003)
文章在混合高斯模型的基础上,对更新率做了进一步的改进,以解决目前对海上运动船舶检测不足的问题。文章的基本思想是首先用一种改进的混合高斯模型对运动的船舶进行检测,然后采用Kalman滤波与Camshift相结合的方法分析前者检测的结果,实现船舶的跟踪。在跟踪过程中,先通过Kalman滤波进行预测,然后在此基础上采用Camshift进行位置的搜索。通过这样的方式,不仅提高了模型的自适应性,而且提高了跟踪船舶的速度和准确度。
混合高斯模型;Kalman预测;Camshift
Class NumberTP391
1 引言
随着全球经济的发展,国际海运行业欣欣向荣。但由于水上环境的特殊性和复杂性,航海行业中经常发生船舶相撞、船桥相撞等事故,导致了巨大财产的损失和人员的伤亡。如何避免船舶相撞、船桥相撞成为人们研究的热点[1]。如果在事故发生前预先统计水面运动船舶数量信息、描述其航行迹象,就能更好的调度航行的船舶,避免灾害事故的发生[2~3]。
20世纪以来,随着计算机技术的发展,数字图像处理技术逐渐有了更加广泛的应用,如车牌的定位,人脸、指纹识别自动导航系统等领域。由于受光照、风以及水面波浪等复杂而多变坏境的影响,自然环境下拍摄的水上运动船舶的视频序列不可避免的带有噪声、不规则运动纹理等,这就给船舶的检测和稳定跟踪增加了难度。针对这一问题,本文提出了改进的检测和跟踪方法。本文主要分两个模块:第一模块是以Stauffer[2~4]提出的自适应混合高斯模型[5~6]作为基础,提出改变自适应更新率。第二个模块是将Camshift[7]搜索模型和kala⁃man[7]滤波预测模型相组合用以提高船舶的跟踪速度及准确度。整个实验过程如图1所示。

图1实验流程图
2 改进的混合高斯的水面目标检测
本文选择使用混合高斯模型,但是传统的混合高斯模型不适用于本文实验的场景,因为本文的背景不干净且存在运动目标,所以在经典的混合高斯模型的基础上进行了改进。
2.1 混合高斯模型算法
混合高斯模型算法的基本思想是:对图像中的每个像素点定义K(3-5)个高斯分布模型,然后随着场景的变化,按照一定规律实时更新各个高斯模型的参数。将权值从大到小进行排序,认为前B个模型权值最大的是背景;在对运动物体检测时,将当前图像的像素点与B个高斯模型匹配[10],只要它与B个高斯模型中的任一模型匹配,则认为是背景,反之则是前景。混合高斯模型的整个工作流程图如图2。

图2混合高斯算法流程图
2.1.1 背景建模
{X1,X2,…,Xt}为某一像素点在t时间段内的像素值的集合。那么该像素点出现的概率如式(1):

式中:ωi,t为第i个高斯模型在t时刻的权重;η(Xi,μi,t,Σi,t)为第i个高斯模型在t时刻的概率密度函数如式(2):

2.1.2 背景更新和目标的检测
对高斯模型进行初始化之后,随着场景的变化,需要对均值、方差、权值三个参数进行实时的更新。详细的算法流程如下:
1)将当前图像的每个像素点与K个高斯模型进行匹配,如果满足式(3)则匹配,否则不匹配。

2)如果匹配,则与之对应的高斯模型的权值ωi,t、均值μi,t、方差σ2i,t进行更新。如果不匹配,均值和方差不变,各参数更新公式如下

3)如果1)中没有任何高斯模型匹配,那么增加一个新的高斯分布,然后将权值最小的高斯模型替换掉,否则会超过K个模型。
4)K个高斯模型的权值更新后,将权重大的、方差小的高斯模型从大到小排序,选择前B个权值大的作为背景模型。B满足下列式(8):

5)目标检测时,将当前帧的像素点与B个背景模型进行匹配判断,如果k个高斯模型中任一个高斯模型满足式(9),则标记为该像素点为背景;否则为前景。

2.2 混合高斯模型的改进
本文通过结合多篇文章,对混合高斯模型进行改进,使之适应海上这一特定场景,并且能够更加准确检测运动的船舶。更新率α(0≤α≤1)的大小对混合高斯模型的实现有很大的影响,它决定了背景的更新率。当α的取值较大时,背景建模比较快,但背景中有目标出现时不能更好地抑制噪声。当α的取值较小时,背景更新比较慢,但能够很好地抑制噪声。因此,对于水面特定的场景,α的取值要综合考虑背景更新率和噪声的抑制。式(10)给出了α的取值,前N帧用自适应更新速率来匹配模型,主要是为了快速地建立背景模型;N帧后更新率为α1,主要目的是更好地抑制噪声。
α取值公式如下所示:

表1和图3很好地验证式(10)。实验采用视频流背景为晃动的树叶,其分辨率为252*288,设置高斯模型数K=4,更新率分别设置为0.01,0.04,0.06,0.08,0.1。建模所需的帧数如表1。
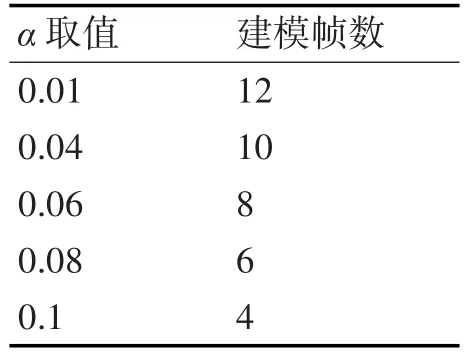
表1 不同更新率建模速度比较
通过上表数据可以看出,当α=0.01时,建模需要12帧;而α=0.1时,建模只需要4帧;由此可知,当α的值越大,建模的速度越快,抑制噪声的能力越差。但是随着运动目标人走进来,不同α的取值对检测效果影响如图3。

图3不同更新率对检测目标的结果
3 基于Kalman滤波的Camshift水上运动目标跟踪
3.1 Camshift算法
Camshaft算法是在Meanshift算法的基础上,对其目标跟踪做了进一步的改进,能够自适应地调整搜索框的大小。基本思想是通过计算搜索窗口颜色概率分布图的零阶矩阵和一阶矩阵得到质心的位置(xc,yc):


然后将搜索窗口的中心位置移动到质心的位置,判断中心位置质心的位置距离是否在预设的阈值范围之内,如果不在范围之内的话则重新计算搜索窗口的质心,直至在范围之内;如果在范围内则进入下一帧图像进行目标搜索。对于下一帧图像设置的新的搜索窗口的位置和尺寸是基于当前图像的窗口的质心位置。
3.2 Kalman滤波
Kalman滤波是一种计算量小、实时性高的递推算法,能够相对准确地预估运动目标的位置。Kalman滤波的系统状态方程和观测方程分别为式(15~16):

其中:Xk,Xk-1是不同时刻的状态变量,Ak,k-1是状态变化矩阵,Hk是观测矩阵,V、W分别是状态和观测噪声矩阵。Kalman滤在当前图像帧中预测下一帧图像中运动目标的质心位置,然后进行搜索匹配,实现对目标的跟踪。
3.3 基于Kalman滤波的Camshift水上船舶跟踪
算法
水上运动目标的预测与跟踪,受光照、水面等方面的影响,使得每帧图片的背景不断变化。然而对于Camshift算法,在跟踪时容易丢失目标。针对Camshift算法的不足,本文提出一种将Kalman[4]滤波算法与Camshift跟踪算法相结合的算法,实现对水上运动船舶的实时跟踪。此算法是将颜色特征和运动特征相互结合,而且在跟踪的速度上也有所提高。从原理上讲,是将两个算法进行线性拟合:

式中,xt+1,t是Kalman滤波预测的t+1时刻的运动目标位置,Y为Camshift预测的运动目标位置,∂是比例因子。本实验在跟踪之前,将前面用混合高斯检测到的船舶运动目标截取下来,形成一个运动模板,计算这个模板的直方图并且归一化,将此直方图作为反向投影,计算出模板t时刻的质心,同时可以用Kalman预先估计t+1时刻目标的位置,然后以该位置为中心Camshift进行搜索。此算法提高了跟踪目标的准确度,缩小了目标位置的搜索范围。此算法的流程图如图4所示。

图4Kalman与Camshift
重复下面的步骤,即可得到下一帧图像中船舶的位置。
Step1:统计t时刻图像帧中目标的信息特征,选择目标搜索窗口并计算它的质心位置。
Step2:利用Kalman滤波对t+1时刻的位置进行预测yt+1。
Step3:以yt+1为搜索的中点,用Camshift搜索目标的准确位置yms。
Step4:较目标模型与yms的Bhattacharyya距离,如果距离小于某一个设定的阈值,则以yms为Kalman滤波的观测值并将它作为目标模型。否则,用Kalman滤波的观测值yt+1代替。
Step5:修正Kalman模型。
Step6:令t=t+1。重复step2、step3、step4、step5、step6。
4 实验结果与分析
本实验主要对这一段视频序列中的水上船舶进行检测与跟踪,其中对船舶检测是用改进的混合高斯模型方法实现的;对船舶的跟踪是将Kalman滤波和Camshift算法相结合实现的。
图5是用传统的混合高斯模型检测的结果,但是背景还存在前景的阴影,前景运动船舶周围存在许多噪声,效果不是很好。
图6是用改进的混合高斯模型实现的,相比较图5,背景中不再存在前景的阴影,前后背景被清晰地分割出来,但是前景周围还是存在一些噪声。总的来说,改进后的混合高斯模型适应性更强,在水上相对复杂的背景下,可以很好地实现船舶的检测。

图6改进后检测
图7、图8分别是用Camshift和Kalman滤波与Camshift相结合实现的运动船舶的跟踪,此视频流分辨率是252*288,总共有202帧。

图7Camshift跟踪

图8Kalman+Camshift跟踪
图7中的四帧是Camshift的跟踪效果图,目标的有些部分没有跟踪到。
图8是采用Kalman滤波和Camshift相结合实现的跟踪效果,相比较图8的跟踪效可以看出,其满足实时跟踪的要求。从跟踪过程中,可以看出第二种算在跟踪时速度较快,表2是两种算法平均每帧跟踪的时间比较。

表2 两种算法的时间比较
5 结语
在对船舶检测过程中,本文提出了一种改进的混合高斯模型算法,从而能够准确提取出运动的船舶,同时利用Camshifth与Kalman滤波方法进行船舶的跟踪,满足了实时跟踪的要求。实验结果表明:对于水上这种复杂的背景,本文提出的算法适应性强,能实现实时性。但是仍然存在局限性,在目标检测时,前景目标的分割仍存在一些噪点,还有待改进。对于跟踪算法,当水上出现的目标颜色相近时,目标跟踪可靠性降低,所以对于内河背景下船舶的跟踪此算法还得进一步完善。
[1]唐志强.混合高斯模型的船舶侵限检测系统研究[D].南京:南京大学,2015. TANG Zhiqiang.Vessel invasion detection system limited the gaussian mixture model research[D].Nanjing:Nan⁃jing University,2015.
[2]姚会,苏松志,王丽,等.基于改进的混合高斯模型的运动目标检测方法[J].厦门大学学报:自然科学版,2008,47(4):505-510. YAO Hui,SU Zhisong,WANG Li.Moving object detection based on improved gaussian mixture model method[J]. Journal of Xiamen University:Natural Science Edition,2008,47(4):505-510.
[3]闫钧华,贺大雷.基于Kalman预测器的改进的CAMShift目标跟踪[J].中国惯性学报,2015(4):198-215. YAN Junhua,HE Dalei.Based on Kalman predictor of im⁃proved CAMShift tracking[J].Chinese Journal of Inertia. 2015(4):198-215.
[4]吴琦颖,李翠华.一种新颖的海上运动目标实时监测方法[J].计算机工程与应用,2014,43(14):213-216. WU Qiying,LI Cuihua.A novel maritime moving target re⁃al-time monitoring method[J].Computer Engineering and Application,2014,43(14):213-216.
[5]冈萨雷斯,伍兹.数字图像处理[M].阮秋琦译.北京:电子工业出版社,2007. GANG Saleisi,WU zi.Digital image processing[M]. Qiu-qiruantranslation.Beijing:ElectronicIndustry Press,2007.
[6]直芳,王运琼,朱敏.数字图像处理与分析[M].北京:清华大学出版社,2006. ZHI Fang,WANG Yunqiong,ZHU Min.Digital image pro⁃cessing and analysis[M].Beijing:tsinghua university press,2006.
[7]翟卫欣,程承旗.基于Kalman滤波的Camshift运动跟踪算法[J].北京大学学报(自然科学版),2015(5):165-182. ZHA Weixin,CHENG Chengqi.Camshift tracking algo⁃rithm based on Kalman filter[J].Journal of Beijing univer⁃sity(natural science edition),2015(5):165-182.
[8]Viola P,Jones M.Robust real-time object detection[J]. International Journal of Computer Vision,2001.
[9]Wang Zhenshu.Bian,Shaorun,Lei Ming.Feature extrac⁃tion and classification of load dynamic characteristics based on lifting wavelet packet transform in power system load modeling[J].International Journal of Electrical Pow⁃er and Energy Systems,2014(5):213-246.
[10]Jiang Enyuan,Wang Enyuan.Analysis of Abnormal Vehi⁃cle Behavior Based on Trajectory Fitting[C]//Proceed⁃ings of 2015 Workshop 11,2015.
Detection and Tracking of Moving Target of Aquatic Vessels
CAI DanDUAN XianhuaGAO Haizhuang
(School of Computer Science and Engineering,Jiangsu University of Science and Technology,Zhenjiang212003)
Based on the Gaussian mixture model and aim at to solve the shortage of detection at present,this paper main idea is using improved gaussian mixture model to detectact target and then adopting the method of combining Kalman filter prediction and Camshift search algorithm.During tracing,first the movement of the target is predicted by using the Kalman filter,and based on this the position is searched by using the Camshift.At last,the results of the experiment apply in detection and tracking of aquatic vessels.Not only the adaptability of the model is improved,and moving target tracking speed and accuracy are improved further.
Gaussian mixture mode,Kalman filter prediction,Camshift
TP391
10.3969/j.issn.1672-9722.2017.07.016
2017年1月4日,
2017年2月17日
“江苏高校高技术船舶协同创新中心/江苏科技大学海洋装备研究院”(编号:HZ2016021)资助。
蔡丹,女,硕士,研究方向:电子对抗、图像处理、模式识别等。段先华,男,博士,教授,研究方向:电子对抗、图像处理、模式识别等。高海壮,男,硕士研究生,研究方向:电子对抗、图像处理、模式识别等。