上甑机器人在白酒固态蒸馏中的应用现状与探讨
2017-07-31张贵宇庹先国汤科元彭英杰
张贵宇,庹先国,李 杉,陈 林,汤科元,彭英杰
(1.四川理工学院自动化与信息工程学院,四川自贡 643000;2.人工智能四川省重点实验室,四川自贡 643000;3.四川理工学院物理与电子工程学院,四川自贡 643000)
上甑机器人在白酒固态蒸馏中的应用现状与探讨
张贵宇1,2,庹先国1,2,李 杉1,陈 林1,汤科元3,彭英杰3
(1.四川理工学院自动化与信息工程学院,四川自贡 643000;2.人工智能四川省重点实验室,四川自贡 643000;3.四川理工学院物理与电子工程学院,四川自贡 643000)
机器人上甑是白酒生产自动化发展中难度较大的环节,抖动式机器人和旋转式机器人是当前两类主流上甑机器人,本文介绍了两类上甑机器人的结构组成及其工作原理,并针对“探气上甑,均撒匀铺”的工艺要求探讨了两类机器人在“铺料”工艺上的优缺点,以及“探气”工艺上的不足。最后,根据探讨的不足之处,对上甑机器人未来的研究方向提出了个人见解,并对其在未来白酒生产中的重要意义进行了展望。
上甑机器人,探气,铺料
中国白酒是世界六大蒸馏酒之一,固态蒸馏是中国白酒独有的酿造工艺,也是我国劳动人民的智慧结晶[1-2]。固态蒸馏是将粮谷类作物通过发酵后所得到的酒醅装入甑桶内,通过甑桶蒸馏来提取酒醅颗粒内部的乙醇和各类风味物质的过程[3]。“生香靠发酵,提香靠蒸馏”是白酒酿造精髓的总结,可见,蒸馏是酿造好酒的关键工艺环节,而蒸馏的好坏关键又在于上甑工艺的优劣[4-6]。
上甑是将酒醅装入甑桶的过程,传统上甑方法由酿酒师傅用撮箕将酒醅一层一层地铺在甑桶内,且必须满足“探气上甑,均撒匀铺”的工艺要求[7],以实现产酒、提香的最优。在人工操作模式下,劳动强度大、工作环境差,且酒质和产酒率因人而异。为了改善这一生产现状,近些年来部分酿酒企业开始尝试将机器人技术引入到上甑环节,抖动式、旋转式上甑机器人为应用较广泛的两类机器人。
然而在实际生产中,机器人上甑存在着探气不准、铺料不均等问题,直接影响酒质和产酒率。针对这些问题,本文结合在某白酒企业自动化生产线的工作经历,对当前市场上应用较多的抖动式上甑机器人和旋转式机器人展开了应用性研究,并剖析了其问题产生的原因。
1 探气上甑,均撒匀铺
1.1 理论依据
白酒蒸馏本质上是一个传质传热的过程。酒醅在蒸汽加热作用下,其内部物质不断逸出,从而在甑桶内形成浓度、温度和压力梯度,因此产生分子扩散,使酒精等物质从低甑位流向高甑位[8-9]。传质过程可用如下菲克扩散方程表示:
式(1)
1.2 现实生产工艺
“探气上甑”是当甑桶内的物料表面呈现少量白色雾状酒气时再铺上一层冷料的操作。该工艺方法在避免跑汽的前提下,可最大程度通过蒸汽加热表层酒醅,从而在铺上冷料后得到尽可能大的温差。因此,“探气上甑”的优势在于可以形成料层间的最大dT,提高酒精和香味物质的馏出[10],但该方法依靠人工经验判断易造成跑汽现象。
“均撒匀铺”是上甑铺料的工艺要求,达到轻、松、匀、薄、平、缓[11]。“轻、松、缓”意在增加酒醅之间的疏松度,以营造良好的蒸馏环境;“匀、薄、平”意在减小dZ,增大温度梯度,提高酒醅内部物质的馏出量。
在实际人工生产过程中,不可避免的会出现铺料不均的情况,从而引起“跑汽”或“压汽”现象。针对跑汽点应及时进行补料处理;应对压汽点,要先去除部分物料,以引导蒸汽尽快向该点运动,见气后再回填物料[12]。可见,人工操作标准不统一、酒质和产酒率差异大,鉴于此,机械化、自动化、智能化蒸馏已成为白酒生产的必然趋势[13-14]。
2 上甑机器人的应用
通过对国内几家大型白酒企业的调研,上甑操作多采用抖动式和旋转式上甑机器人。
2.1 抖动式上甑机器人
如图1所示,抖动式上甑机器人基于通用六自由度工业机器人设计,机械臂末端加装料斗,通过料斗的抖动实现上甑铺料。
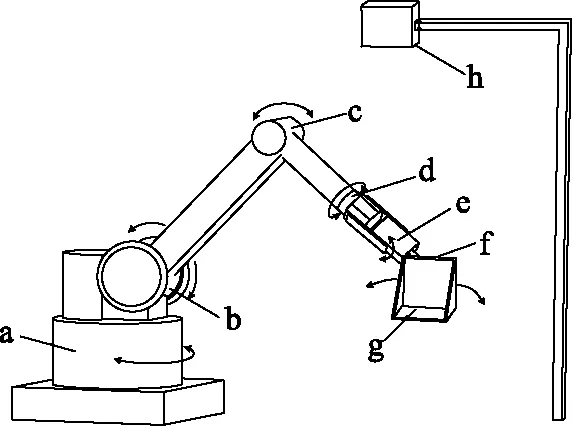
图1 抖动式上甑机器人结构示意图Fig.1 Schematic diagram of the structure of vibratory steamer-feeding robot注:a~f:机器人活动关节;g:盛料斗;h:红外热成像仪。
抖动式上甑机器人将甑桶平面划分为多个区域分别进行铺料[15],每斗酒醅恰好满足一个区域的铺料需求,如图2所示。
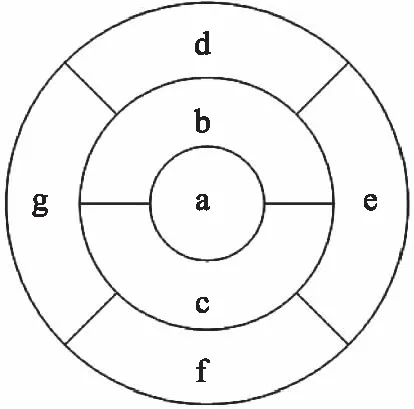
图2 铺料区域分布Fig.2 Area distribution of filling material
通用型工业机器人需配备独立的物料传送装置,将酒醅传送至机器人的运动范围内。每完成一个区域的铺料,料斗需移动至物料传送装置处接料,再移动至下一个区域铺料,依此往复完成甑桶整个平面的铺料操作。其铺料流程如图3所示。

图3 抖动式上甑机器人铺料流程图Fig.3 Flow chart of filling material with the vibratory steamer-feeding robot
2.2 旋转式上甑机器人
如图4所示,旋转式上甑机器人针对上甑工艺而设计,主要由进料口、内置物料传送装置和出料口、升降机构、旋转机构、摆臂机构组成[16]。其中,机械臂g内嵌物料传送装置,物料由进料口a传送至出料口f,再由出料口执行铺料操作;升降机构依据酒醅表层位置调整出料口高度;旋转机构实现出料口绕甑桶内部旋转,由摆臂机构调整旋转机构的旋转半径。
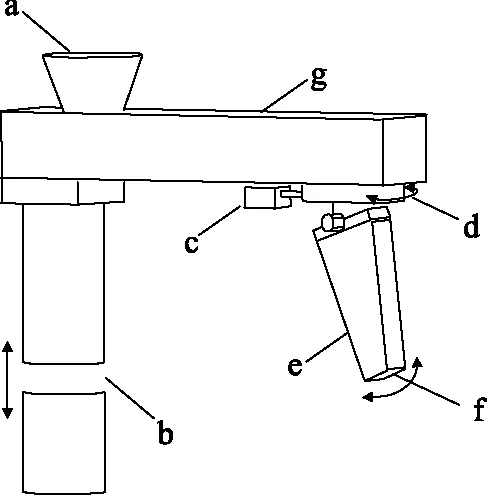
图4 旋转式上甑机器人结构示意图Fig.4 Schematic diagram of the structure of the rotary steamer-feeding robot
旋转式上甑机器人铺料流程如图5所示。
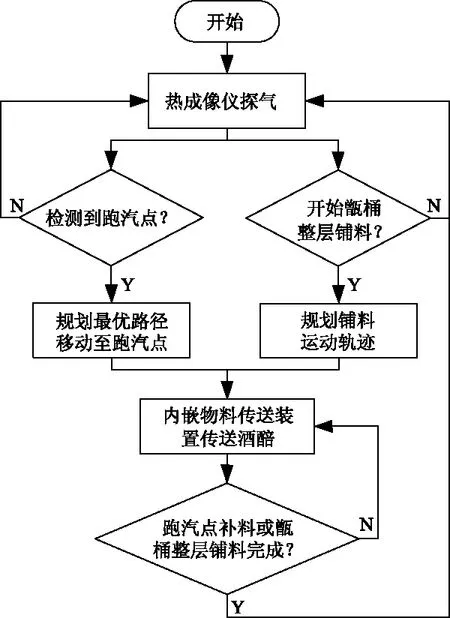
图5 旋转式上甑机器人铺料流程图Fig.5 Flow chart of filling material with the rotary steamer-feeding robot
3 上甑机器人生产工艺现状
3.1 机器人探气
3.1.1 红外热成像仪探气应用原理 以上两种上甑机器人均采用了红外热成像仪,通过监测酒醅表面温度来判断酒醅下方蒸汽上升高度。
程序设计上多采用如下方式,设定两个温度阈值f1、f2(f1 3.1.2 红外热成像探气的不足 首先,红外热成像技术主要检测物体表面的红外辐射能量,无法直接获取被测物体的内部温度分布状况[18-22],因此,学者通过热传导反问题来推算出物体内部的热源分布和热源强度[23-28]。但探汽的本质在于探测甑桶内蒸汽上升的高度,蒸汽上升高度又是蒸汽压力、物料松散度、物料温度、室温等多元因素的综合结果,因此,需要建立一个复杂的数学模型才能达到目的。李宏等在上甑机器人的设计中均采用了红外测温探汽方法[29-31],但并未阐明酒醅表面温度与蒸汽高度的确定关系,以及如何选取参考温度阈值。因此,能否仅仅通过红外热成像仪检测的单一温度参数来确定蒸汽的上升高度还需进一步研究论证。 另外,由于甑桶不锈钢材料的导热系数远大于酒醅的导热系数,因此,甑桶壁温度较高。为了避免引起上甑机器人的误判断,需要对甑桶壁进行屏蔽处理。然而正是由于甑桶壁的高温,极易引起蒸汽上升速度快而出现跑汽现象,即所谓的“甑边效应”[32]。针对该问题张良栋等在不锈钢甑桶内壁嵌入一层木片以改善甑边效应[33],但木片会吸收酒醅中的物质成分,其中的淀粉、糖等物质易引起木片表面发霉,由此又引入了食品卫生问题。 目前,在白酒自动化生产研究中,“探气上甑”监测方法研究还处于相对落后的地位。 3.2 机器人铺料 3.2.1 抖动式上甑机器人铺料方法探讨 抖动式上甑机器人采用间断性、抖动式铺料方式,优势在于抖动式铺料基本可以满足轻、松、匀、平、缓的工艺要求;间断性铺料方法为“接料—铺料—接料”循环往复的运动过程,其不足之处表现在:首先,当物料表面出现多点跑汽现象时,由于间断性铺料方式导致补料不及时,易造成酒损。另外,循环往复的运动存在轨迹重叠现象,易造成上甑时间延长,以及先铺的物料先受热,后铺的酒醅后受热等受热不均现象。随着铺料层数的增多,会进一步造成蒸汽上升的高度差,引起局部压汽现象,降低酒质、影响产酒率。 3.2.2 旋转式上甑机器人铺料方法探讨 旋转式上甑机器人出料口绕甑桶内部旋转,铺料平整度、松散度不及抖动式上甑机器人,料层剖面效果如图6所示。 图6 酒醅剖面效果图Fig.6 The effect drawing of the section of fermented grains 该机器人的优点在于:内嵌的物料传送装置使机器人实现了连续性铺料,相比抖动式上甑机器人,运动轨迹更加合理,提高了对跑汽点补料的响应速度。 而缺点也比较明显:在铺料方面,由于物料是自上而下滑落,当出料口较低时,易造成物料堆积,物料表层凹凸不平;当出料口较高时,由于重力作用易造成物料挤压成块,以上不足均会造成受热不均,影响酒质和产酒率; 表1 抖动式和旋转式上甑机器人性能对比Table 1 Performance comparison of vibratory steamer-filling robot and rotary steamer-filling robot 注:表1仅限本文中两类上甑机器人做对比。在食品卫生方面,由于采用了内嵌式履带传送物料,物料容易粘黏在机器人内部,不宜清理,随时间的延长导致霉变,严重影响食品卫生安全。 自动化、智能化生产已成为白酒行业发展的必然趋势,而“探气上甑”工艺是整个行业实现自动化最困难、最复杂的工艺环节之一,甚至部分白酒企业在推动自动化生产过程中,仍然在这两个工艺环节保留着人工操作[34-35]。因此,自动化上甑技术正处于不断探索和改进的发展阶段,距离人工工艺效果还存在一定的差距。 本文就目前应用较广泛的抖动式和旋转式上甑机器人展开探讨,阐述了其上甑工作原理及优缺点。二者均采用红外热成像探测酒醅表面温度,但其并不能直接反映蒸汽在酒醅中的位置信息,达不到准确探气的目的。除此之外,在铺料工艺和食品卫生等方面的性能对比如表1所示。 现有不足之处也正是今后自动化上甑应重点开展研究的方向之一,一是如何实现精准探气和精细化铺料,二者是密切相关、相互制约的,探气不准影响铺料决策,铺料不均影响蒸汽在酒醅中的运动,增加探气难度;二是要对机器人的铺料运动路径进行优化,提高响应速度,改善对上甑时间的把控,合理的上甑时间才能保证酒质和产酒量。 白酒蒸馏自动化上甑还有很多值得探讨和改进的技术难点,相信随着不断的深入研究,上甑机器人在白酒酿造中将会得到更加广泛的应用,推动白酒生产的标准化、统一化,为我国传统白酒的快速发展提供新动力。 [1]泸州老窖集团有限责任公司.泸型酒技艺大全[M].北京:中国轻工业出版社,2011. [2]焦二满,吴方星,栾峰,等.传统白酒酿造企业全厂综合自动化发展的思考[J].酿酒科技,2013,(5):117-121. [3]杨平,涂荣坤,钱志伟,等.甑桶醅层高度及结构设计对蒸馏效率及酒质的影响研究[J].酿酒科技2012,(10):94-98. [4]张家双,李彬,邢恩宏,等.固态蒸馏白酒的上甑自动化概述[J].酿酒,2016,43(5):79-82. [5]魏景俊,肖坤才,张伟花,等.“驿酒上甑八招式”对白酒蒸馏效果和白酒品质影响的研究[J].酿酒,2014,41(6):50-52. [6]林忠义,谭宏.控制上甑馏酒工序提高基酒产质量[J].酿酒科技,2009,(7):49-55. [7]李大和,李国红.上甑蒸馏技术与白酒产质量的关系[J].酿酒科技,2012,(1):65-69. [8]梁山,白酒蒸馏过程的系统动力学分析与控制策略研究[J].重庆大学学报,1997,20(2):33-37. [9]石为人,梁山,谢昭莉,等.白酒蒸馏操作过程特征知识的抽取[J].重庆大学学报,1998,21(4):117-122. [10]彭明启.甑桶蒸馏的探气上甑操作的科学内涵初探[J].酿酒科技,1991,(4):13-16. [11]张召刚,罗新杰.浅析大曲酒装甑操作“六字”原则[J].酿酒,2001,28(5):49. [12]王久增,刘诗全.固态白酒的装甑技巧[J].酿酒科技,1992,(2):18-21. [13]栗永清. 固态法白酒机械化的总结探索[J].酿酒科技,2010,(12):70-72. [14]李玉彤,齐士朋,邱利华,等.白酒机械化酿造研究进展与探讨[J]. 酿酒科技,2016,(10):82-84. [15]李宏,花勇.机械装甑布料控制系统PLC设计[J].食品与机械,2015,31(4):114-118. [16]武汉奋进智能机器有限公司.一种上甑机器人:中国:201610012949.2[P].2016-03-23. [17]朱梓清.装甑机器人运动规划的研究与应用[D].大连:大连理工大学,2015. [18]贾文抖,范春利,孙丰瑞,等.基于红外测温的内部点热源的识别[J].红外与激光工程,2015,44(3):837-844. [19]Shi H,Zhang X,Sun F,et al. Inverse heat transfer algorithm for multi-phase interface detection of oil tank based on infrared imaging temperature measurement[J]. Infrared & Laser Engineering,2013,(S1):24-29. [20]E.M. Burghold,Y. Frekers,R. Kneer. Transient contact heat transfer measurements based on high-speed IR-thermography[J]. International Journal of Thermal Sciences,2017,115:169-175. [21]Muramatsu M,Nakasumi S,Harada Y,et al. Application of the inverse heat conduction analysis to the evaluation of defects in carbonfiber-reinforced plastics[J]. Mechanics of Composite Materials,2015,50(6):695-704. [22]吴玉鹏.红外热像仪智能数字监控系统的研究[J].中国高新技术企业,2014(16):24-26. [23]Maciejewska B,Strąk K,Piasecka M. The Solution of a Two-dimensional Inverse Heat Transfer Problem Using the Trefftz Method[J]. Procedia Engineering,2016,157:82-88. [24]Yang L,Wang Y,Liu H,et al. Infrared identification of internal overheating components inside an electric control cabinet by inverse heat transfer problem[J]. Proceedings of SPIE-The International Society for Optical Engineering,2014,9300(2):293-298. [25]Bozzoli F,Cattani L,Rainieri S. Effect of wall corrugation on local convective heat transfer in coiled tubes[J]. International Journal of Heat & Mass Transfer,2016,101:76-90. [26]Jancskar I. IR-image based inverse radiative heat transferproblem[J]. Pollack Periodica,2013,8(1):75-87. [28]Zhang Q,Lippmann S,Grasemann A,et al. Determination of temperature dependent thermophysical properties using an inverse method and an infrared line camera[J]. International Journal of Heat & Mass Transfer,2016,96:242-248. [29]李宏,马光喜.基于机器视觉的装甑布料系统设计[J].酿酒科技,2014,(12):73-75. [30]天津荣新佳科技有限公司.一种柔性撒料的智能上颤机器人:中国:201610475901.5[P].2016-09-07. [31]中国科学院自动化研究所.白酒全自动上甑机器人系统:中国:201511021408.8[P].2016-06-22. [32]李海龙,朱丽,张良,等.白酒蒸馏过程中甑边效应的热力学分析[J].酿酒科技,2009,(2):31-36. [33]张良栋,孟思栋,田建平,等.浓香型固态发酵白酒自动上出甑蒸馏装置研究[J]. 酿酒科技,2015,(12):82-85. [34]丁鹏飞,彭兵,谢国排.浓香型白酒酿造机械化研究与生产实践[J].酿酒,2013,41(3):28-31. [35]徐军,卢祖涛,赵之华,等.浓香型白酒酿造机械化设备的研究与实践[J].酿酒科技,2015,(4):85-87. 因本刊已被《中国知网》 (包括“中国知网”优先数字出版库) 独家全文收录,所以所付稿酬中 已包含该网站及光盘应付的稿酬。 Application status and study on steamer-filling robotin traditional distillation of Chinese liquor ZHANG Gui-yu1,2,TUO Xian-guo1,2,LI Shan1,CHEN Lin1,TANG Ke-yuan3,PENG Ying-jie3 (1.School of Automation & Information Engineering,Sichuan University of Science & Engineering,Zigong 643000,China;2.Artificial Intelligence Key Laboratory of Sichuan Province,Zigong 643000,China;3.School of Physics and Electronic Engineering Sichuan University of Science & Engineering,Zigong 643000,China) Steamer-filling with robot is one of the most difficult parts in the development of Chinese liquor production automation. Shaking robot and revolving robot is the two kinds of current mainstream steamer-filling robots. This paper introduced the structure and working principle of the two kinds of robots. The advantages and disadvantages in the “filling material” process,and the lack in “detecting steam” process of the two kinds of the robots were discussed with the “detecting steam for filling material,filling material evenly” process requirement. Furthermore,according to the shortcoming mentioned in the discussion,some personal views on the future research of the steamer-filling robot were put forward,and the significance of the robot in the future production of liquor was also forecasted . steamer-filling robot;detecting steam;filling material 2016-12-27 张贵宇(1987-),男,硕士,讲师,研究方向:白酒自动化、人工智能,E-mail:gyz_118@163.com。 四川省科技计划项目(2016SZ0074)。 TS261.3 A 1002-0306(2017)13-0216-05 10.13386/j.issn1002-0306.2017.13.041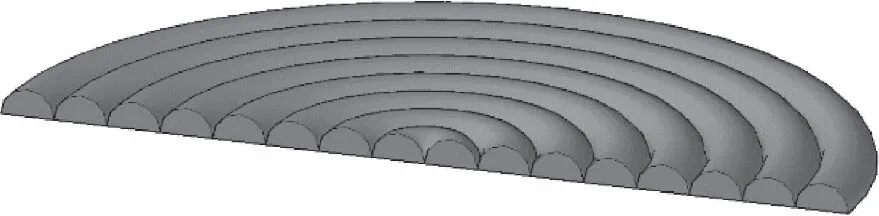

4 两类上甑机器人的探讨
5 上甑机器人的展望
