一种改进的相机灵敏度测试系统
2017-07-31范新坤佟首峰宋延嵩张艺蓝
范新坤,张 磊,佟首峰,宋延嵩,江 伦,张艺蓝
(长春理工大学空地激光通信技术国防重点学科实验室,吉林 长春 130022)
一种改进的相机灵敏度测试系统
范新坤,张 磊,佟首峰,宋延嵩,江 伦,张艺蓝
(长春理工大学空地激光通信技术国防重点学科实验室,吉林 长春 130022)
空间激光通信系统以激光为载体进行数据传输,由于大气信道干扰、剧烈平台扰动、强烈大气附面层等不利影响,使得捕获探测器接收到的光斑信号非常微弱,影响通信链路的建立,对捕获探测器的灵敏度测量有助于分析和评价捕获链路建立的最远距离。在充分分析捕获链路功率的基础上搭建实验系统,用扫描振镜及CCD相机完成对其灵敏度测试实验。实验表明:当曝光时间为2ms和0.2ms时,相机的探测能力分别为-80.83dBm和-72.43dBm。在极限探测灵敏度下,选用高斯拟合算法进行激光光斑中心的定位计算,结果表明该算法定位精度可达0.01pixel,并且具有良好的稳定性。
探测灵敏度;高斯拟合;亚像素定位;激光通信
0 引 言
在空间激光通信捕获、瞄睢和跟踪(acquisition pointing and tracking,APT)系统中,粗、精探测器的探测精度决定着整个系统的跟踪精度[1]。电荷耦合元件(charge coupled device,CCD)作为一种图像传感器,能够方便给出目标图像中的光强数值和光斑图像的位置信息,常用在信标光(束散角为mrad量级)的探测中[2-3]。光斑图像在CCD靶面上所占的面积越大,即像素数越多,光斑的定位精度也就越高。理想条件下CCD探测到的信标光斑为圆光斑,但是在大气信道干扰、剧烈平台扰动、强烈大气附面层等不利影响下[4],探测器接收到的光斑信号功率和形状不断变化,完成快速捕获、精密跟踪和可靠通信的过程,其难度非常大。为了提高跟踪精度,需要对接收单元的探测能力进行测试,进而分析出其灵敏度。文献[5]主要分析了激光对CCD的损伤,并对CCD靶面进行标定;文献[6]进行了星间跟踪精度的测试,搭建测试平台,并对APT系统参数分析;文献[7]通过对激光光斑的特性分析,设计了通过确定光斑的半径,实现对光斑的检测。
本文基于以上分析,提出利用标定的衰减片联合FPGA图像处理板实时处理进入到CCD视场中的微弱光斑[8],根据设计的光斑中心定位算法,确保在相机极限探测能力下能够捕获到光斑并进行实时的处理[9]。通过实验数据得出,当曝光时间分别为2ms和0.2 ms时,相机的极限探测能力分别为-80.83 dBm和-72.43dBm,完全满足空间激光通信系统捕获探测器接收到的光信噪比为7时,信标探测器所接收到的功率。
1 相机参数
为了实现对相机灵敏度的测试,选用Photonfocus公司生产的MV-D1024E-40型号的相机并搭建实验平台进行灵敏度的测试。通过实验数据分析出该相机对微弱光斑的探测能力[10],对开展空间激光通信中捕获单元的研究以及评价捕获链路建立的最远距离提供有价值的数据参考[11]。相机的主要设计参数如表1所示。
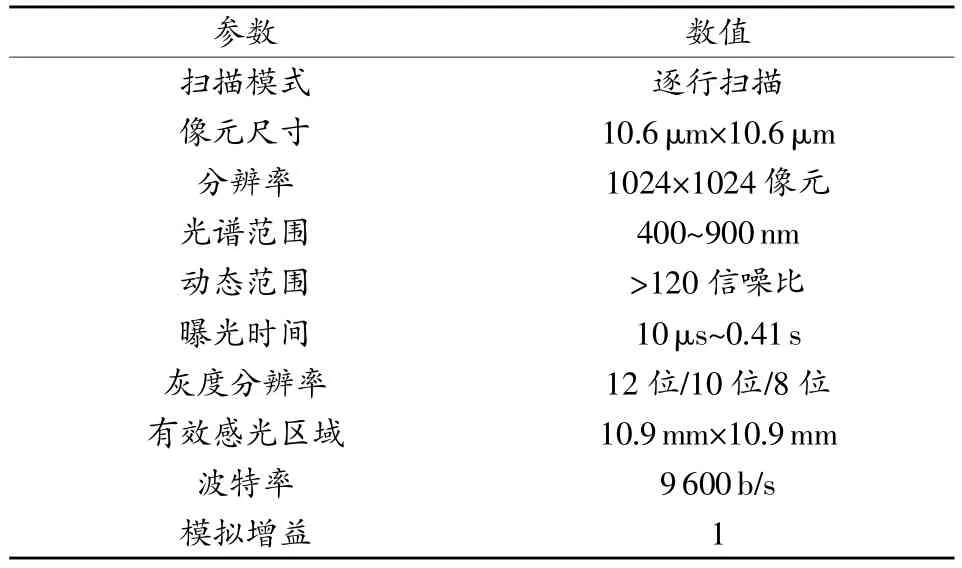
表1 相机参数
2 衰减片的标定
在进行灵敏度测试时,为了防止相机产生光饱和或者激光光斑能量过大而被打坏,在光路中采用衰减片将激光光强衰减到CCD相机可探测饱和光强以下,可探测灵敏度光强以上。
衰减片的标定光路如图1所示,整个标定实验在室内夜晚环境下进行,避免强背景光的影响。激光器选用波长为808nm的半导体激光器,功率可调。标定的具体步骤为:1)搭建好光路,开启激光器,并调节功率大小,使光斑在监视器中的状态是稳定并可被捕获到;2)把光功率计放入图1所示的位置,并记录此时的示数为P1;3)在上述步骤不变的情况下,移除衰减片后读取示数为P2;4)重复以上步骤,多次记录P1,P2的数据,测试数据如表2所示。

图1 衰减片标定
根据测试数据求取平均值,得到衰减片的平均衰减值为-32.33dB。在相机灵敏度测试中,将用-32.33dB作为衰减片的固定衰减值。
3 实验过程
3.1 测试实验平台
为了完成相机灵敏度的测试,在室内搭建测试平台(如图2所示),其主要由发射和接收2个部分组成。发射系统由激光器、准直器、透镜、扫描振镜、反射镜、滤波片、衰减片构成;接收系统由CCD相机、FPGA图像处理板、监视器、计算机等部分构成[12]。激光从发射端射出,准直器对光束进行整形并输出平行光;在透镜的作用下使平行光聚焦,滤波片滤除反射后的杂光,使已经衰减过的光束在相机得到较好的光斑图像。相机通过Camera Link接口将光斑图像数据传输到FPGA图像处理板中,在监视器中显示光斑的坐标及捕获状态。计算机通过改变驱动电压,实现振镜的偏转,调整光斑在相机中的成像位置,并记录保存下光斑图像,以便后续分析处理。
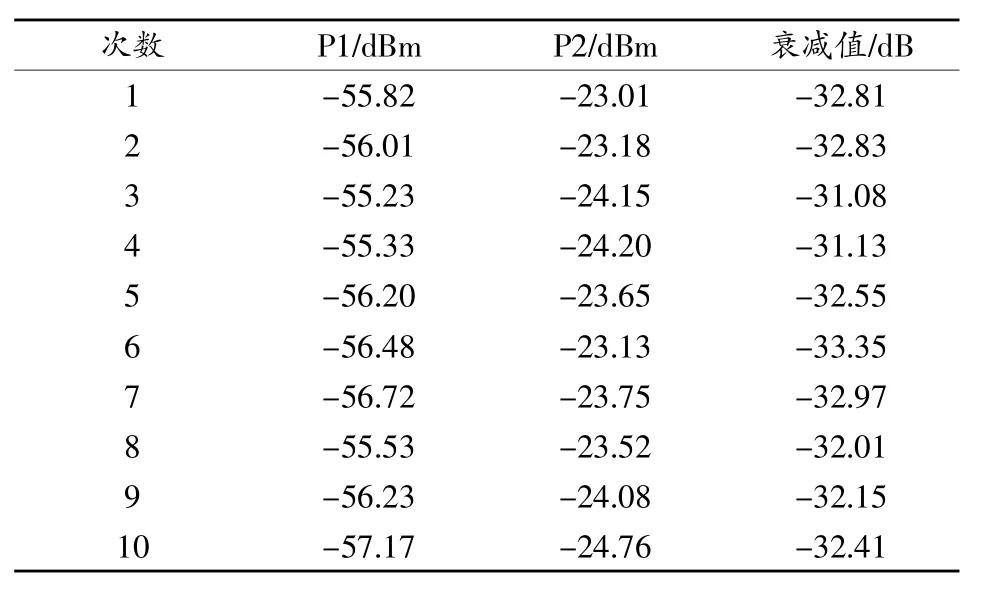
表2 衰减片测试数据
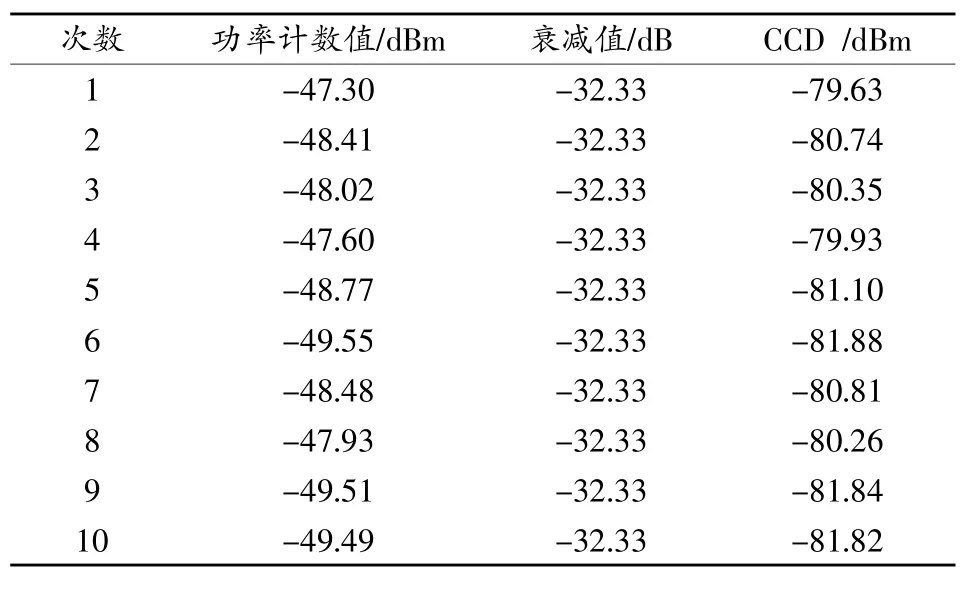
表3 粗跟踪测试数据
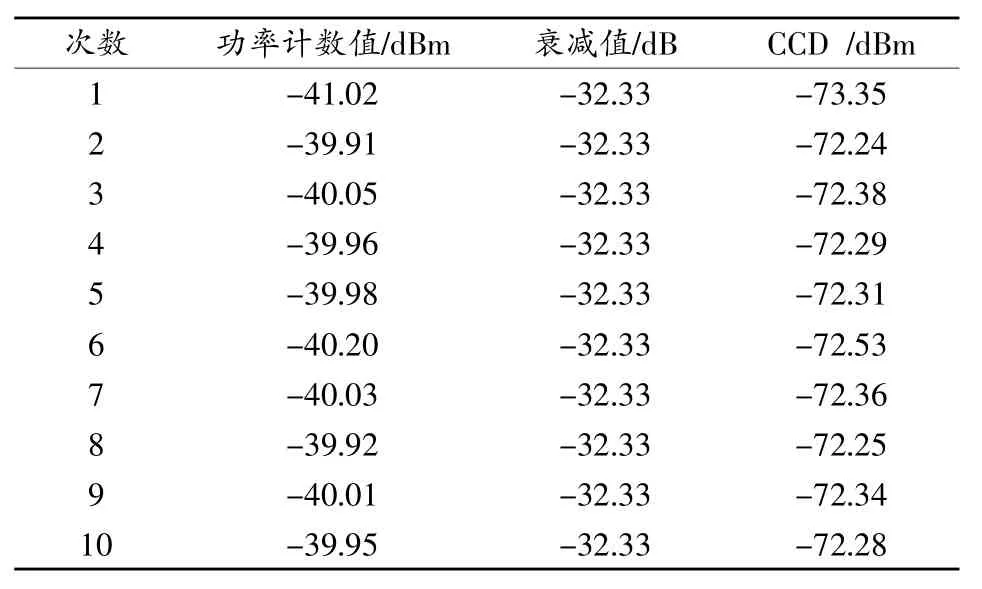
表4 精跟踪测试数据
3.2 实验结果与分析
在测试实验平台搭建完后,不断降低激光器的输出功率,直到光功率计示数低于-50dBm;移走光功率计,用CCD相机接收衰减后的光束;调整激光功率,待到CCD光斑检测临界点时,再次放入光功率计并读取示数,即可根据标定关系得出CCD灵敏度。通过调整曝光时间,获取较好的光斑图像分别进行粗、精跟踪实验。测试数据如表3、表4所示。
1)当曝光时间为2ms时,进行粗跟踪实验。
根据测试结果,求得相机靶面的平均接收功率值为-80.83dBm。
2)当曝光时间为0.2ms时,进行精跟踪实验。
根据测试结果,求得相机靶面的平均接收功率值为-72.43dBm。
本实验在暗环境下进行,通过测试相机所能探测到的微弱光斑信号来反映相机的灵敏度。实验验证,在相同增益的前提下,增加相机的曝光时间[13],CCD视场中接收到的光能量就会增加,进而产生更多的光子数,使得光斑信号的信噪比有所提升,相机的探测能力就会增加。
4 基于FPGA的光斑识别技术
FPGA由于设计的灵活性高、功能强大、容量大、集成度高等特点,广泛应用在图像处理以及复杂算法的实现过程[14]。本实验选用Xilinx公司的Spartan-3E系列XC3S1200E型号的FPGA实现光斑滤波、行列计数、光斑提取、光斑中心判决、脱靶量输出和图像显示等功能,图3是FPGA实现整个功能的流程图[15]。
在连接FPGA图像处理板的Camera Link接口中选用了Base模式下的A端口进行图像数据的传输,通过接收到的4位图像使能信号来实现图像的采集与显示[16]。4位图像使能信号分别为LVAL(行有效信号)、FVAL(帧有效信号)、DVAL(数据有效信号)和 Spare(保留位)。
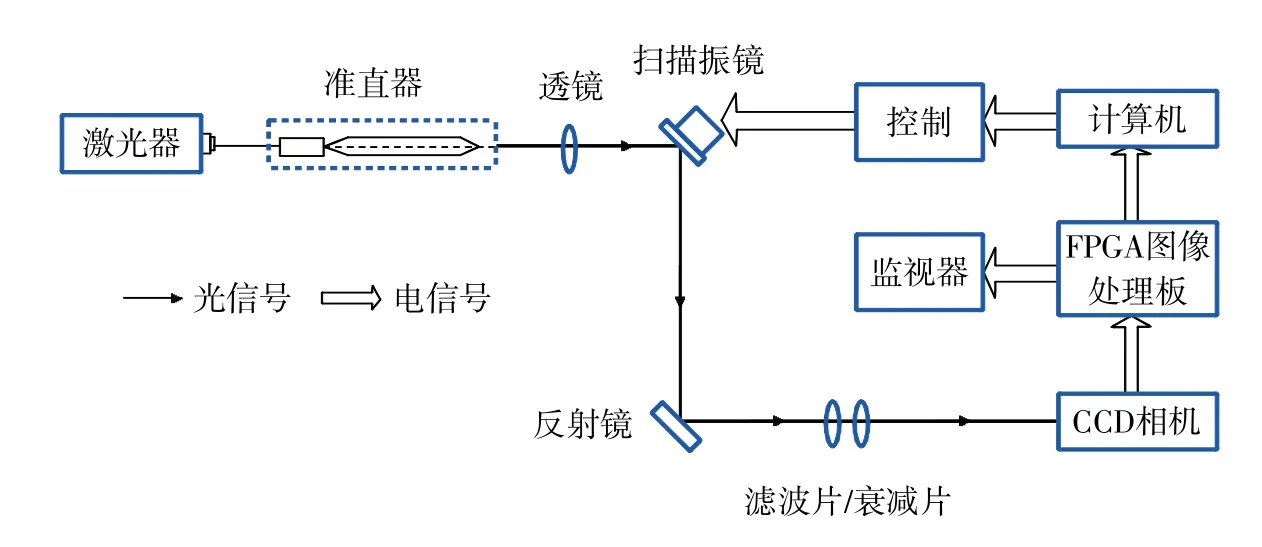
图2 实验系统组成框图
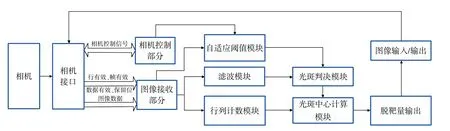
图3 图像处理算法流程图
4.1 自适应阈值二值化
激光光斑的灰度值比图像背景的灰度值要高,而且灰度值的变化比较剧烈[17]。在进行光斑检测的时候,由于光子噪声和读出噪声的干扰,接收到的光斑图像会存在一些孤立的亮点,影响确定真实光斑的位置。为了避免噪声对结果的影响,采用自适应阈值法,根据激光光斑的变化进行自适应选取最优阈值,减小随机误差,提高光斑的分割性能[18]。但是该算法在进行光斑中心计算时需要在短时间内解析一帧图像的所有像素信息[19],对于处理器的计算能力要求较高。
自适应阈值的计算公式可表示为

式中:T——自适应阈值的计算结果;
Ravg——一帧图像的灰度平均值;
k——常数,一般取值为5~15;
σ——光斑图像灰度的均方差。
设激光光斑图像为f,大小为m×n,图像在像素点(i,j)的灰度值为 f(i,j),则有:
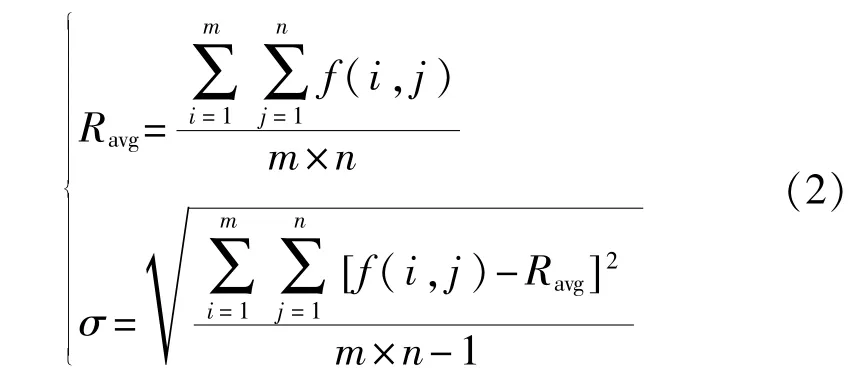
根据光斑图像的灰度,选取最优的k值确定阈值大小进行背景与光斑图像的分割,计算公式为

4.2 亚像素级光斑中心计算
对光斑图像进行滤波和二值化之后,实现了对光斑的提取。本实验中选用的相机像元尺寸为10.6μm×10.6μm,在进行光斑中心提取过程中,仅凭单个像素的空间分辨率无法满足检测精度的要求,这就需要对CCD进行亚像素细分[20]。
目前,最常用的亚像素算法有重心法、曲线拟合、径向基函数插值法、密度函数估算法等。考虑到在硬件实际处理的复杂性和实时性,选用高斯曲线拟合定位算法,对经过预处理后的光斑图像进行亚像素光斑的定位计算[21]。
对激光光斑而言,其能量分布满足高斯分布函数[22-23],高斯曲线表达式可表示为

式中:T0——峰值参数,且I0为光斑在探测器上的总
x0、y0——光斑的中心位置;
σx、σy——激光光斑分别沿x,y方向上光强分布的标准差。
对式(4)两端取对数,展开后可得到:
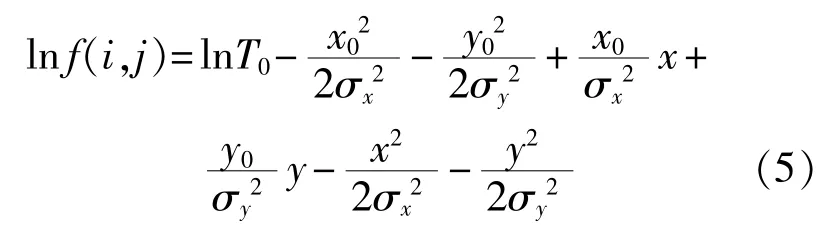
由最小二乘拟合算法计算出所有残差的平方和并求取极小值,将拟合的极值点(x0,y0)作为光斑的中心位置。
通过以上算法,可以精确地计算出光斑的中心坐标,保证在进行灵敏度实验时不会由于光斑能量的微弱而无法确定是否捕获到的问题,提高了测试的准确性。为了验证本文算法对光斑的定位精度,在实验过程中,通过调整振镜的方位得到20帧光斑图像,并用Matlab对固定阈值质心算法、自适应阈值质心算法、高斯拟合算法进行仿真。
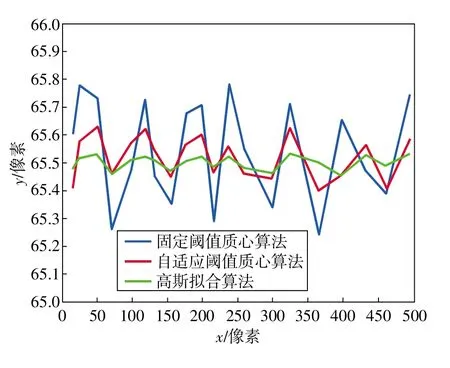
图4 定位精度分析
从图4中可以看出,前两种算法对光斑中心的定位精度在0.1pixel,而高斯拟合算法的定位精度在0.01pixel,并且稳定性得到明显提高。对其原因进一步理论分析可以得出:1)固定阈值质心法由于采用固定阈值,造成在一帧图像中接近阈值的像素点被舍弃,使图像分布不均匀,计算结果产生较大的误差;2)采用自适应阈值后,根据每一帧图像灰度值的变化,自动选择合适的阈值,兼顾了图像各个像素的情况;3)高斯拟合算法处理的光斑是由标准高斯函数离散化后得到的,其光斑的灰度矩阵是按照高斯函数形式分布的,即使大气信道、噪声和背景光的干扰使光斑产生闪烁、破碎、散斑效应等,通过拟合也可以得到比固定阈值质心算法更高的定位精度。
5 结束语
空间激光通信接收探测器的灵敏度是APT系统中的重要性能指标之一,在空间激光通信链路功率分析的基础上,搭建实验平台,实现对相机的灵敏度测试。在微弱光斑信号条件下,利用亚像素细分技术,提高了光斑定位精度。
[1] 佟首峰,刘云清,姜会林.自由空间激光通信系统APT粗跟踪链路功率分析[J].红外与激光工程,2006,35(3):322-325.
[2]王家乐.基于光斑图像的激光能量密度分布测量技术[D].长春:长春理工大学,2013.
[3]韩成,白宝兴,杨华民,等.空地激光通信跟踪精度主要外界影响因素研究[J].光子学报,2010,39(1):89-94.
[4]宋延嵩,常帅,佟首峰,等.航空激光通信系统的特性分析及机载激光通信试验[J].中国激光,2016,43(12):215-226.
[5]王世勇.激光对CCD探测器干扰损伤的研究及模糊评估[D].长春:中国科学院研究生院(长春光学精密机械与物理研究所),2002.
[6] 胡渝.星间光通信跟踪精度测试[D].成都:电子科技大学,2006.
[7]张爱丽.强天空背景光条件下空间激光通信系统的光斑检测技术研究[D].长春:长春理工大学,2011.
[8] 陈小进.基于FPGA的图像跟踪系统的设计[D].南京:南京理工大学,2014.
[9] 陈毅强.卫星光通信中提高光斑定位精度方法研究[D].哈尔滨:哈尔滨工业大学,2015.
[10]李洁.激光光斑能量分布及中心定位的分析与研究[D].太原:中北大学,2015.
[11]姜会林.空间激光通信技术与系统[M].北京:国防工业出版社,2010:81-91.
[12]赵馨,宋延嵩,佟首峰,等.空间激光通信捕获、对准、跟踪系统动态演示实验[J].中国激光,2014(3):125-130.
[13]董发祥.一种基于高灵敏度CCD的微光相机设计[D].西安:中国科学院研究生院(西安光学精密机械研究所),2010.
[14]YAN B, SUN Y, DING F, et al.Design of CMOS image acquisition system based on FPGA[J].Applied Mechanics&Materials,2011,40(20):510-515.
[15]姜会林,江伦,宋延嵩,等.一点对多点同时空间激光通信光学跟瞄技术研究[J].中国激光,2015(4):142-150.
[16]TOMASI M, PUNDLIK S, LUO G.FPGA-DSP coprocessing for feature tracking in smart video sensors[J].Journal of Real-Time Image Processing,2014,11(4):1-17.
[17]王杰飞,刘洁瑜,赵晗,等.一种改进的激光光斑中心亚像素定位方法[J].激光技术,2015(4):476-479.
[18]唐冠群.几种激光光斑中心定位算法的比较[J].北京信息科技大学学报(自然科学版),2009,24(1):61-64.
[19]张树方,佟首峰,于笑楠,等.激光目标模拟系统光斑尺度控制单元研究[J].光电工程,2015(11):88-94.
[20]李一芒,盛磊,陈云善,等.高速激光光斑检测系统的设计与实现[J].激光技术,2015,39(4):533-536.
[21]SINHA S,ZHANG W.Low-power FPGA design using memoization-based approximate computing[J].IEEE Transactionson Very Large Scale Integration Systems,2016,24(8):2665-2678.
[22]张利群,李醒飞,王错,等.基于滑动边缘点的高斯拟合亚像素定位算法[J].计算机应用与软件,2016,33(1):190-194.
[23]王丽丽,胡中文,季杭馨.基于高斯拟合的激光光斑中心定位算法[J].应用光学,2012,33(5):985-990.
(编辑:商丹丹)
An improved testing system for camera sensitivity
FAN Xinkun, ZHANG Lei, TONG Shoufeng, SONG Yansong, JIANG Lun, ZHANG Yilan
(Defence Key Subject Laboratory of Aero and Ground Laser Communication Technology,Changchun University of Science and Technology,Changchun 130022,China)
Space laser communication system uses laser as the carrier for data transmission.Due to adverse effects such as atmospheric channel interference, violent platform disturbance and strong atmospheric boundary layer, the spot signal
by the capture detector is very weak,which affects the establishment of communication link.The sensitivity measurement of the capture detector helps to analyze and evaluate the furthest distance that the capture link is established.Based on the full analysis of the capture link power,the scanning galvanometer and CCD camera for testing system is set up,which can accomplish sensitivity test.The test results show that when the exposure time is 2ms and 0.2ms,detectivity of camera is-80.83dBm and-72.43 dBm respectively.In the limit detection sensitivity,the Gaussian fitting algorithm is used to locate the center of the laser spot.The results show that the locating precision of the algorithm can reach 0.01 pixel with a good stability.
detection sensitivity; Gaussian fitting; sub-pixel positioning; laser communication
A
1674-5124(2017)06-0065-05
10.11857/j.issn.1674-5124.2017.06.014
2016-10-28;
2016-12-20
国家高新技术研究发展计划“863计划”资助项目(2014AA701178)
范新坤(1990-),男,吉林长春市人,硕士,主要从事空间激光通信系统高精度激光光斑识别与检测技术研究。
张 磊(1982-),男,吉林长春市人,博士,主要从事复杂条件下目标的识别与检测技术研究。
