基于生物反射模型的四足机器人坡面运动控制与越障研究
2017-07-26罗庆生李华师
葛 卓 罗庆生 贾 燕 李华师
(1北京理工大学机电学院, 北京 100081)(2北京理工大学机械与车辆学院, 北京 100081)
基于生物反射模型的四足机器人坡面运动控制与越障研究
葛 卓1罗庆生1贾 燕2李华师2
(1北京理工大学机电学院, 北京 100081)(2北京理工大学机械与车辆学院, 北京 100081)
为了提高四足机器人在包含坡面和障碍物等复杂地形中的运动能力与环境自适应能力,在对四足机器人基本步态研究的基础上,利用生物节律运动和反射控制机理,对四足机器人的适应性行走控制模型进行了研究.建立了适用于四足机器人坡面运动以及越障运动的前庭反射和屈肌反射数学模型,根据该数学模型构建的生物反射控制器与机器人膝、髋关节CPG控制网络有机融合,构成了协调性好、整体性高的控制系统.通过Adams/Matlab联合仿真,验证了所提出控制模型的可行性与有效性.该模型能够有效地使前膝后肘式四足机器人流畅、平稳地完成上下坡运动,并具备自适应越障运动能力.
四足机器人;中枢模式发生器;生物反射模型;复杂地形
四足机器人既有优于双足机器人的平稳性又避免了六足机器人机构的冗余性和复杂性.目前常见的多足机器人运动控制方法有3种[1-2]:基于模型的方法、基于行为的方法和基于中枢模式发生器(central pattern generator, CPG)的生物控制方法.文献[3-5]分别用足端轨迹规划、模型控制、在线学习等方法,使机器人具备一定复杂地形运动能力.Gehring等[6]基于逆动力学方法对一种小型四足机器人的坡面全向运动进行了研究,针对一定的坡面角度进行了支撑相躯干控制和摆动相足端轨迹的优化,实现了机器人坡面Trot步态运动.相比于其他控制方法,基于CPG的生物控制方法借鉴自然界动物的运动控制机理,可有效提高机器人运动的稳定性和环境适应性,特别在协调多自由度运动方面具有独特的优越性.Fukuoka等[7]利用CPG控制策略实现了机器狗Tekken基本步态下的平地行走,并引入了多种反馈信息与CPG网络融合,可以适应未知环境.EPFL Cheetah机器人[8-9]利用CPG网络输出控制髋关节,通过腱绳传动实现膝关节和踝关节的联动,控制策略较为简单.Arena等[10]以CPG作为底层运动控制器,设计了上层姿势控制体系,实现了对适应地形的实时速度和前足越障的控制.Zhang等[11-12]利用改进型CPG网络模型使振荡器的输出更适合于机器人的运动控制,实现了机器人Biosbot上下坡、姿势稳定调节等动作.Vonsek等[13]基于CPG网络驱动模块化机器人产生多种步态,并能够感知所接触到的障碍物.目前很多研究是对动物运动机理的部分模拟,对高层调节、生物反射及其与CPG的融合的研究较少,因而机器人的环境自适应能力不高,很多研究侧重于在时间域应用CPG模型,没有充分利用生物CPG的耦合特性.
本文借鉴动物典型的反射行为和反射机理,对用于实现机器人坡面运动的前庭反射和用于实现机器人越障功能的屈肌反射进行研究,构建了一种用于提高四足机器人环境适应性的生物反射控制模型.为有效发挥反射对CPG输出信号的调节作用,研究了反射模型与CPG控制系统以及反射模型之间的融合方法.通过联合仿真实验验证了控制算法的可行性和有效性,实现了机器人在包含坡面和障碍物的复杂环境中的稳定行走.
1 四足机器人仿生控制策略设计与控制器建模
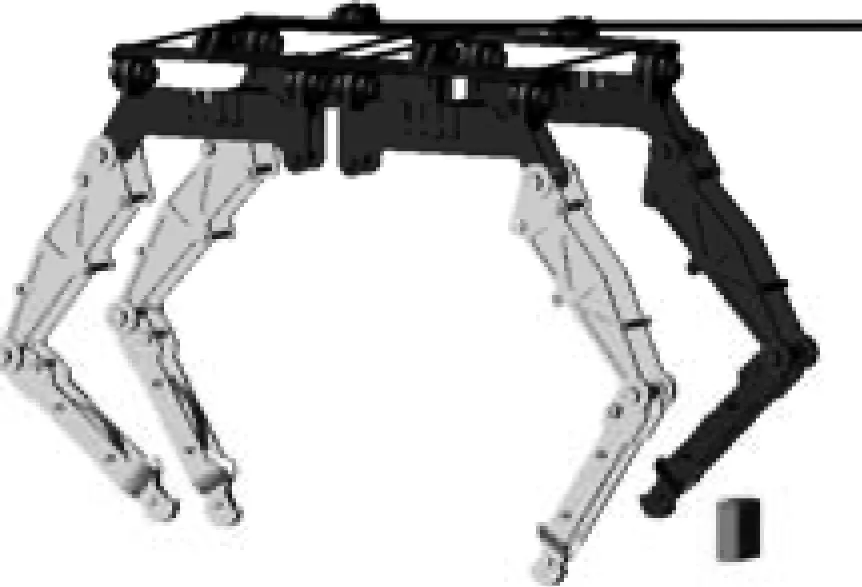
本文以实验室所研制的四足机器人为研究平台,机器人虚拟样机如图1所示.机器人采用两腿节的结构形式,关节配置方式为前后对称分布的前膝后肘式,每条腿具有3个自由度,分别为髋关节处的侧摆、髋关节前后转动以及膝关节前后转动.机器人整体长0.9 m,宽0.4 m,上、下腿节长度均为0.4 m,自重90 kg.
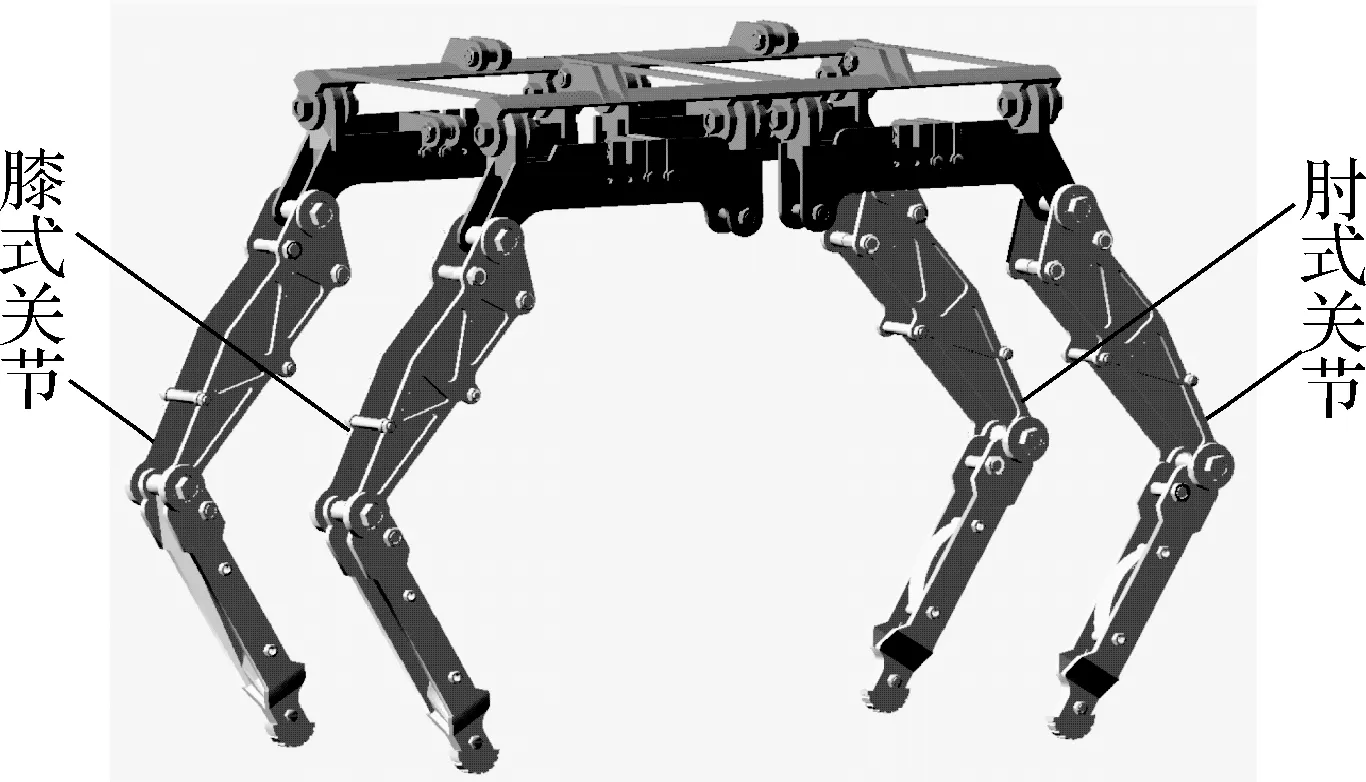
图1 四足机器人虚拟样机模型
1.1 CPG网络模型
CPG是动物节律运动的中心控制单元,负责产生节律运动信号.采用CPG控制方法对机器人进行步态控制的首要步骤是建立CPG模型,产生稳定节律输出的关节控制信号.多个振荡单元通过相位耦合构成CPG网络,改变网络的拓扑结构可以改变振荡信号的输出模式,从而实现多种步态.
仿照生物控制的原理,四足机器人不同步态下各腿之间的相位关系是通过各相应CPG单元间的相互抑制作用实现的,在CPG网络中反映为加权矩阵Kij.根据确定的机械模型方案与控制策略,建立如图2所示的CPG网络结构.图中,xi,yi为第i个CPG单元中相互耦合的2个变量,下标1~4分别代表1~4号振荡器,xi输出髋关节控制信号,yi输出膝关节控制信号.LF, RF, LH, RH分别代表左前、右前、左后以及右后腿,H和K分别表示髋关节和膝关节,加权矩阵Kij中的元素kij表示第j个振荡器对第i个振荡器的连接权重.
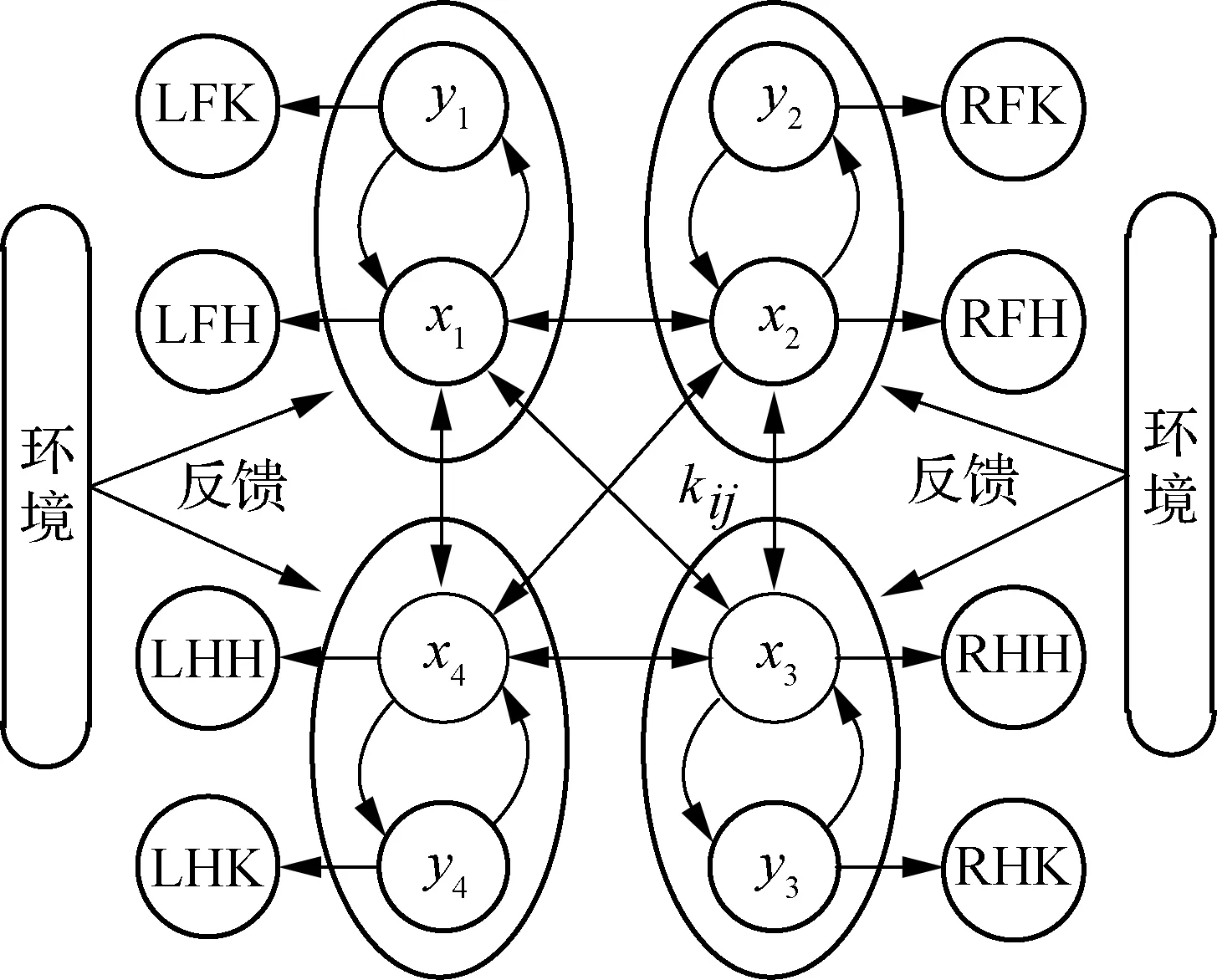
图2 CPG网络结构图
本文以Hopf振荡器作为CPG单元模型,根据所研究的前庭反射与屈膝反射的特点,构建一种引入反馈项的CPG单元模型:
(1)

1.2 髋关节和膝关节控制模型
根据CPG网络输出特性与机器人被控关节特性分析,CPG网络的输出x可以直接用于髋关节控制,而需要对输出y作一定的改变以控制膝关节.当髋关节角度处于上升区间时,膝式结构膝关节角度在平衡位置以下变化,而肘式结构膝关节角度在平衡位置以上变化.将振荡器输出y的幅值乘以一比例系数,从而获得膝关节幅值,得到的具有反馈项的控制模型如下:
(2)
式中,c=AK/AH,AK,AH分别为膝关节和髋关节幅值;Ψ为膝式结构和肘式结构的标志系数.
(3)
图3 机器人腿部关节运动幅值计算示意图
2 前庭反射与屈肌反射的生物机理
根据仿生学研究[7],由CPG产生的节律运动信号可使生物在平地上实现稳定的行走,而通过各种生物反射可以实现复杂路面的自适应性运动.实现四足机器人的后坡面运动和越障运动,所涉及到的2类生物反射为:前庭反射及屈肌反射.当动物在坡面运动时,由前庭器官等检测到躯体角度的变化,通过前庭反射调节四肢伸肌与屈肌,调节重心位置以使身体维持一个相对稳定的姿势.动物在行走过程中下腿节碰到障碍物,屈肌反射控制膝关节回退一定角度,使腿节与障碍物分离,再通过状态判断完成其他动作.基于动物屈肌反射动作特点得到建立反射控制模型的准则为:① 屈肌反射只在受到刺激的肢体上发生,不影响其他肢体运动;② 反射动作在当前摆动相内完成;③ 在摆动相的不同阶段,屈肌反射的动作并不相同.
3 四足机器人生物反射模型的建立
3.1 前庭反射模型
本文研究的前庭反射模型适用于四足机器人在无倾覆的小坡度情况下运动,对于前膝后肘式的四足机器人腿部关节配置,引入前庭反射后,上坡运动时前腿的髋关节平衡位置角度增大,后腿的髋关节平衡位置角度也增大,膝关节平衡位置相对于同腿的髋关节作反向等角度变化,前腿收缩、后腿伸展;下坡运动时,前腿的髋关节平衡位置角度减小,后腿的髋关节平衡位置角度也减小,膝关节平衡位置仍反向等角度变化,前腿伸展、后腿收缩.建立前庭反射的控制模型,在上下坡时对各腿膝髋关节的平衡位置进行调节:当反馈项为正值时,CPG输出曲线上移,平衡位置增大;当反馈项为负值时,CPG输出曲线下移,平衡位置减小.当机器人从平面运动到坡面上后,机体与坡面保持平行,机体传感器获得的俯仰角即为坡度角α.将α代入反馈项中,得到反馈项表达式为
(4)
定义Δα为引入前庭反射后,机器人机体根据坡度信号由坡面平行姿态改变为前庭反射姿态之间的相对姿态角变量,根据文献[2],四足机器人实现坡面运动的充分条件是Δα=k1α,k1≈0.24.记上下坡过程中,位于下方的腿的平衡位置变化角度为Δθ,位于上方的腿的平衡位置变化角度为Δη,则引入前庭反射后,四足机器人坡面运动时各关节平衡位置的角度变化如表1所示.
表1 各关节上下坡平衡位置变化角度
对躯体的相对姿势角Δα与关节平衡位置变化角度Δθ、Δη的关系进行推导,可得到前庭反射模型:

(5)
式中,l0为机身长度;k2由拟合曲线获得,k2≈2.26.
3.2 屈肌反射模型
膝式结构的摆动前相屈肌反射
(6)
膝式结构的摆动后相屈肌反射
(7)
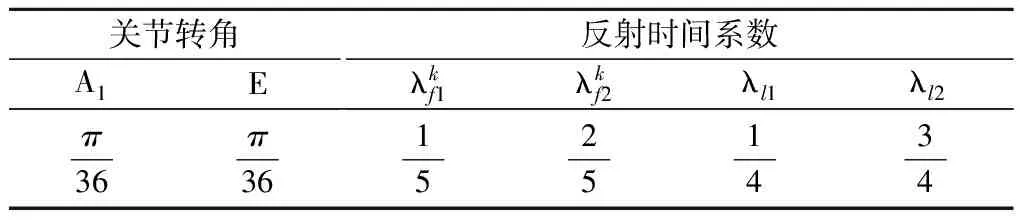
表2 膝式结构屈肌反射模型参数
3.3 生物反射模型与CPG模型的融合
将坡面角度作为反馈量,利用前庭反射模型求出膝髋关节平衡位置的变化角度Δθ和Δη,针对上下坡分别引入前后腿CPG单元的反馈项,在CPG内部各单元相互作用后,输出控制信号的平衡位置按设定发生改变,实现前庭反射与CPG模型的融合.屈肌反射通过改变反射腿的CPG输出信号完成越障动作.在反射触发前,CPG模型正常输出关节控制信号;力传感器检测到触障后,将此刻CPG模型输出值作为屈肌反射模型的参数进行运算,输出反射信号;反射完成后CPG模型恢复关节控制信号的正常输出.从而CPG模型、前庭反射模型和屈肌反射模型形成了一个整体,控制系统模型框图如图4所示.
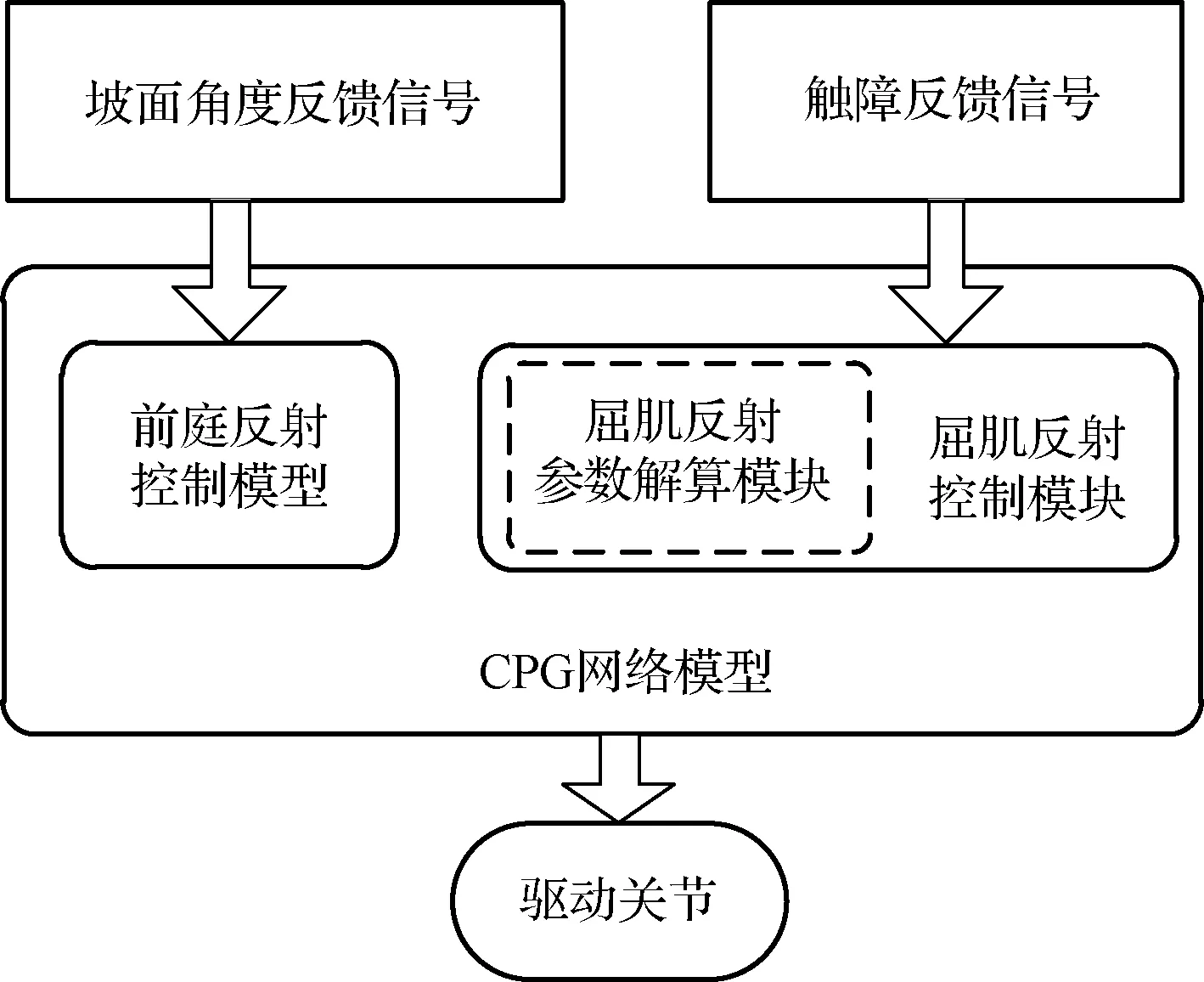
图4 生物反射控制系统模型框图
4 实验结果与讨论
基于Matlab/Simulink与ADAMS联合仿真方法对四足机器人在本文提出的生物反射模型控制器作用下的运动效果进行仿真验证.
4.1 坡面运动实验验证
在Trot步态下对前庭反射模型控制进行仿真,设定坡面角度12°,记录机器人质心在世界坐标系中竖直Y方向的运动.如图5所示,未引入前庭反射的机器人在13.77 s时由于重心过分靠后,前腿离地时向后倾倒;引入前庭反射后,机器人的运动稳定性得到改善,实现了稳定的爬坡运动.
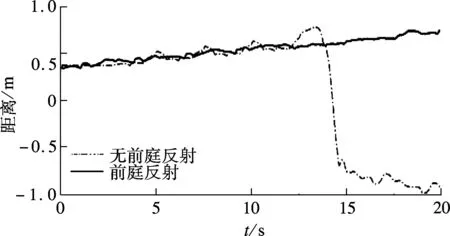
图5 机器人上坡运动Y方向质心运动轨迹
通过仿真实验对比可知,加入前庭反射的方法可以有效抑制机器人坡面运动产生的打滑;所设计的前庭反射模型不仅可使机器人顺利实现上下坡,且机器人重心上下波动较小,运动协调、平稳.
4.2 越障运动实验验证
在Trot步态下,分别对膝式结构摆动后相、肘式结构摆动前相的屈肌反射进行联合仿真验证.
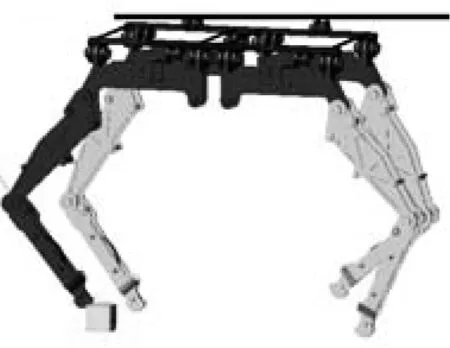
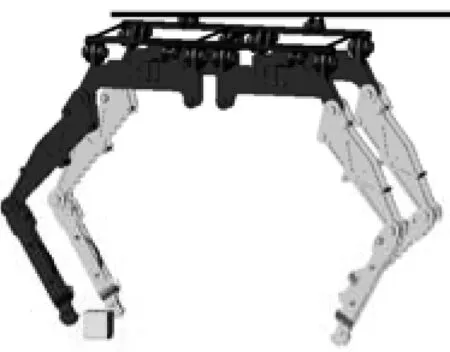
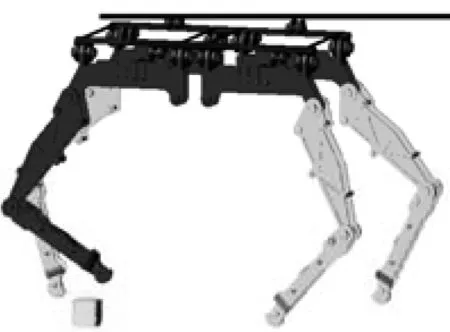
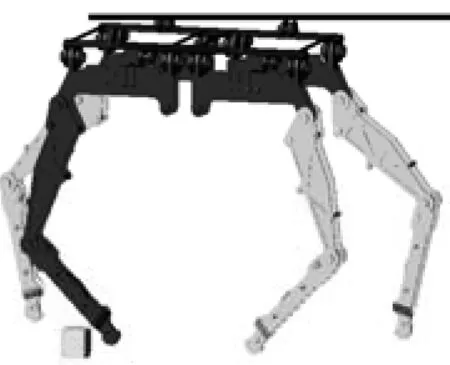
膝式结构腿在摆动后相发生屈肌反射的实验过程中,反射过程、各腿关节轨迹分别如图6和图7所示.根据仿真结果,腿部首先正常前摆,在触障后膝关节角度减小,髋关节角度不变, 完成避障动作.然后膝关节角度增大至平衡位置,髋关节角度回到输出的谷值完成落地动作,进入支撑相等待下一次摆动相.图7中,h1~h4分别为髋关节关节角度变化,k1~k4分别为膝关节的关节角度变化,下标1~4为图2所示腿部编号.
肘式结构腿在摆动前相发生屈肌反射的实验过程中,反射过程、关节轨迹分别如图8、图9所示.根据仿真结果,腿部首先正常前摆,在触障后足端先回退避障,然后抬高、前移越障,最后落地进入支撑相,越过障碍之后进入正常的迈步步态.
(a) 腿部正常前摆
(b) 发生触障
(c) 完成避障反射动作
(d) 避障后足端落地
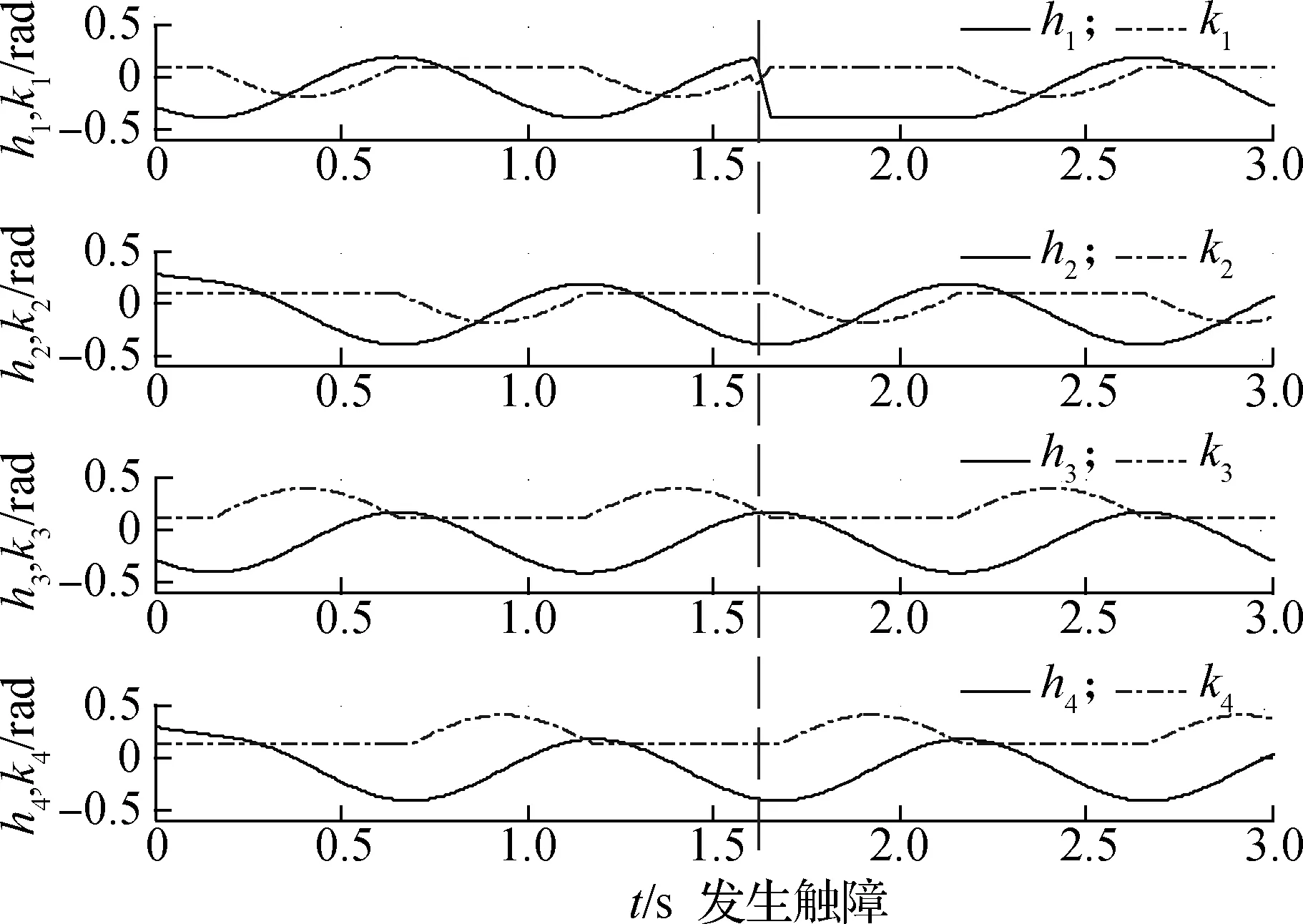
图7 膝式结构摆动后相屈肌反射过程关节角度
(a) 摆动前相发生触障
(b) 足端回退避障
(c) 完成越障动作
(d) 越障后足端落地
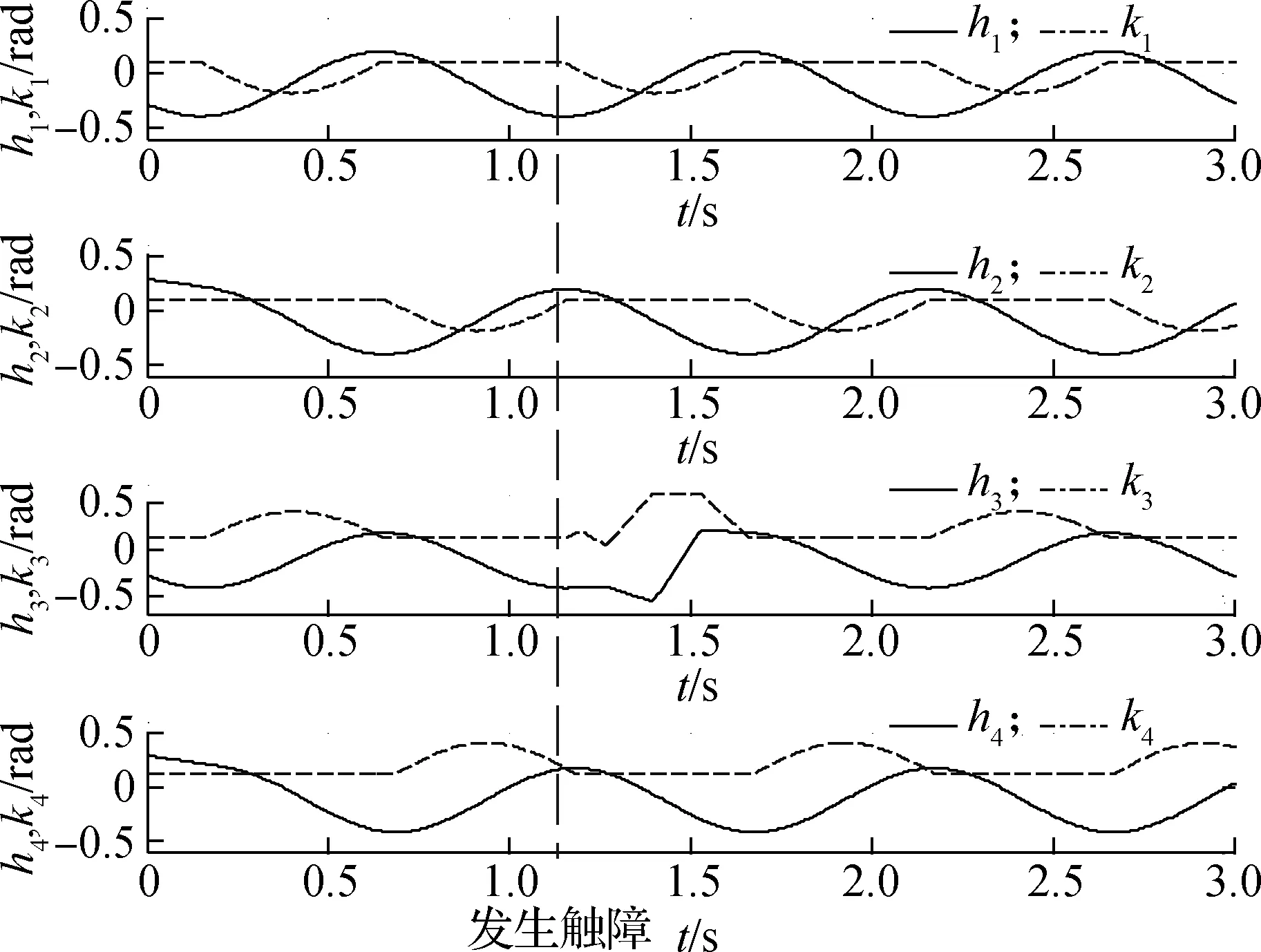
图9 肘式结构摆动前相屈肌反射过程关节角度
仿真过程与结果均与控制模型的期望一致,并且只有反射腿发生了屈肌反射,对其他腿的运动未造成影响,体现了所建立的屈肌反射模型对越障动作规划的可行性与有效性.
5 结论
1) 本文针对四足机器人的坡面运动和越障运动控制问题,通过分析生物反射机理,构造了一种具有反馈项的四足机器人CPG网络控制模型.
2) 针对四足机器人坡面运动,建立了用于调节机器人姿态的前庭反射模型,能够有效维持机器人坡面运动时机身的稳定;针对四足机器人越障运动,对机器人不同腿部关节配置、不同摆动相下的越障或回落动作进行了规划,建立了屈肌反射模型;并实现了CPG网络模型与生物反射模型之间的融合.
3) 通过联合仿真实验,验证了所构建的生物反射控制模型的可行性与有效性,该控制模型能够提高机器人复杂地形的运动能力.由于没有考虑弹性与减震、关节控制力矩、能耗等问题,控制模型与实际情况还存在一定的差距,同时需要对更多反射模型,如踏空反射等进行研究,以使四足机器人可适应更为复杂的地形.
References)
[1]Kimura H, Fukuoka Y, Cohen A H. Biologically inspired adaptive walking of a quadruped robot[J].PhilosophicalTransactionsoftheRoyalSocietyA:Mathematical,PhysicalandEngineeringSciences, 2007, 365(1850): 153-170. DOI:10.1098/rsta.2006.1919.
[2]张秀丽. 四足机器人节律运动及环境适应性的生物控制研究[D]. 北京: 清华大学精密仪器与机械学系, 2004.
[3]Shkolnik A, Levashov M, Manchester I R, et al. Bounding on rough terrain with the LittleDog robot[J].TheInternationalJournalofRoboticsResearch, 2011, 30(2): 192-215. DOI:10.1177/0278364910388315.
[4]Kolter J Z, Ng A Y. The Stanford LittleDog: A learning and rapid replanning approach to quadruped locomotion[J].TheInternationalJournalofRoboticsResearch, 2011, 30(2): 150-174. DOI:10.1177/0278364910390537.
[5]Zucker M, Ratliff N, Stolle M, et al. Optimization and learning for rough terrain legged locomotion[J].TheInternationalJournalofRoboticsResearch, 2011, 30(2): 175-191. DOI:10.1177/0278364910392608.
[6]Gehring C, Bellicoso C D, Coros S, et al. Dynamic trotting on slopes for quadrupedal robots[C]//IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems. Hamburg, Germany, 2015: 5129-5135. DOI: 10.1109/IROS.2015.7354099.
[7]Fukuoka Y, Kimura H. Adaptive dynamic walking of a quadruped robot on irregular terrain based on biological concepts[J].TheInternationalJournalofRoboticsResearch, 2003, 22(3): 187-202. DOI:10.1177/0278364903022003004.
[8]Spröwitz A, Tuleu A, Vespignani M, et al. Towards dynamic trot gait locomotion: Design, control, and experiments with Cheetah-cub, a compliant quadruped robot[J].TheInternationalJournalofRoboticsResearch, 2013, 32(8): 932-950. DOI: 10.1177/0278364913489205.
[9]Heim S W, Ajallooeian M, Eckert P, et al. On designing an active tail for body-pitch control in legged robots via decoupling of control objectives[C]//AssistiveRobotics:Proceedingsofthe18thInternationalConferenceonCLAWAR2015. Hangzhou, China, 2015:256-264.
[10]Arena P, Fortuna L, Frasca M, et al. Learning anticipation via spiking networks: Application to navigation control[J].IEEETransactionsonNeuralNetworks, 2009, 20(2): 202-216. DOI: 10.1109/TNN.2008.2005134.
[11]Zhang X L, E M C. Adaptive walking of a quadrupedal robot based on layered biological reflexes[J].ChineseJournalofMechanicalEngineering, 2012, 25(4): 654-664. DOI: 10.3901/CJME.2012.04.654.
[12]鄂明成, 刘虎, 张秀丽, 等. 一种粗糙地形下四足仿生机器人的柔顺步态生成方法[J]. 机器人, 2014,36(5): 584-591. DOI:10.13973/j.cnki.robot.2014.0584. E Mingcheng, Liu Hu, Zhang Xiuli, et al. Compliant gait generation for a quadruped bionic robot walking on rough terrains[J].Robot, 2014, 36(5): 584-591. DOI:10.13973/j.cnki.robot.2014.0584.(in Chinese)
Study on quadruped robot ramp-trotting and obstacle-crossing based on biological reflex model
Ge Zhuo1Luo Qingsheng1Jia Yan2Li Huashi2
(1School of Mechatronical Engineering, Beijing Institute of Technology, Beijing 100081, China) (2School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, China)
To improve the locomotion ability and terrain adaptive ability of a quadruped robot through complex terrains including ramps and obstacles, based on the study of quadruped robot basic gaits, a biomimetic adaptive control model for the quadruped robot is studied with the mechanisms regarding animals’ rhythmic locomotion and reflex control. The mathematical models of vestibular and flexor reflexes are established to realize trotting on a ramp and obstacle crossing. Reflex controllers derived from the aforementioned mathematical models are integrated with the central pattern generator (CPG) networks of knee and hip joints of the robot, so that a control system is created with good coordination and high degree of integrity. By co-simulation of Adams and Matlab, the feasibility and effectiveness of both the vestibular reflex model and the flexor reflex model are verified. Under the control of such control model, the quadruped robot with all outward knee joints can stably trot uphill or downhill and adaptively achieve obstacle avoidance and crossing.
quadruped robot; central pattern generator (CPG); biological reflex model; rough terrain
10.3969/j.issn.1001-0505.2017.04.012.
2017-02-17. 作者简介: 葛卓(1988—),男,博士生;罗庆生(联系人),男,博士,教授,博士生导师, luoqsh@bit.edu.cn.
国家部委预研基金资助项目(40401060305).
葛卓,罗庆生,贾燕,等.基于生物反射模型的四足机器人坡面运动控制与越障研究[J].东南大学学报(自然科学版),2017,47(4):697-702.
10.3969/j.issn.1001-0505.2017.04.012.
TP242.6
A
1001-0505(2017)04-0697-06