基于颜色识别的智能搬运机器人的设计
2017-07-24郑永涛叶仕通
郑永涛,叶仕通,张 钊
(1.广东工业大学 华立学院,广东 广州511325;2.深圳视爵光旭电子有限公司 广东 深圳518108)
基于颜色识别的智能搬运机器人的设计
郑永涛1,叶仕通1,张 钊2
(1.广东工业大学 华立学院,广东 广州511325;2.深圳视爵光旭电子有限公司 广东 深圳518108)
文中研究基于颜色识别技术进行智能搬运机器人的设计。搬运机器人系统以STM32芯片为控制核心,利用无线通讯模块与控制中心通讯,联合颜色传感器、机械臂以及载物小车组成自动引导搬运机器人系统,实现对码垛小型柱状物料以及不同颜色物体的搬运。通过智能分拣、搬运,以降低生产过程中对人工的使用,同时提高生产效率。
智能搬运机器人;机械手;传感;无线通讯
智能机器人涉及动力系统、传感检测、机械设计以及人工智能等多方面知识,独特地成为一门综合学科。在现实生活中,智能机器人扮演的角色也越来越多,如机械焊接、农场管理、道路交通应用等。基于颜色识别的智能搬运机器人,实现了利用传感器采集模块采集信息、无线通信传导信息、单片机控制核心处理命令的一体化功能[1],使用方便,工作效率高,成本低,对生产应用具有重大意义。
1 系统设计
1.1 系统组成
系统采用STM32单片机作为核心控制模块,完成对执行机构的控制和信息的处理;颜色传感器和机械手分别实现对目标物体的识别和获取、释放;超声波传感器和直流电机分别为运载体提供避障和动力;采用无线通信对整个系统实时监控实现自动控制[2-4]。系统总体结构设计如下:

图1 系统总体结构设计图
1.2 系统硬件设计
根据方案设计和要求,系统可分为单片机控制模块、超声波避障模块、颜色传感器模块、电机驱动模块、机械手控制模块、无线通讯与显示模块、电源模块共7个模块电路。
1.2.1 单片机主控
STM32F103ZET6单片机具有集成度高、功耗控制杰出和实时性能优异的优点。内部集成2通道12位D/A,12通道DMA控制器以及多达112个快速I/ O端口,强干扰场合。单片机最小系统组成(包括I/O接口、晶振、复位电路等)作为系统的核心控制部分,主要完成对颜色传感器和超声波避障数据的采集和显示,通过内部处理实现对电机和机械手的驱动工作。
1.2.2 超声波避障模块设计
超声波避障选择HC-SR04模块进行对障碍物的检测,通过检测的距离对比系统设定的安全距离判定是否启动自动避障动作[5-6]。模块中采用IO触发测距,自动发送8个40 khz的方波,自动检测是否有信号返回;若有信号返回,通过IO输出一高电平,高电平持续的时间就是超声波从发射到返回的时间,测试距离采用[7]:
测试距离=(高电平时间*声速(340M/S))/2,测试距离由STM32核心控制器程序运算实现。
1.2.3 颜色传感器模块设计
专用颜色识别传感器采用以TCS3200D芯片为核心,具有数字兼容接口的RGB彩色光/频率转换器,内部由硅光电二极管阵列和一个电流/频率转换器集成,通过测试输出的频率便可获知RGB颜色的值。颜色传感器模块电路主要由TCS3200D芯片和白色LED阵列组成,通过电源接口供电,数据接口与核心控制器进行连接通信,通过程序算法分离RGB三基色,查表识别[8]。
1.2.4 电机模块设计
作为智能搬运机器人的动力源,考虑搬运车车体、各传感器模块、搬运目标等的重量、电机自重以及工作电压、控制方式等因素,选择RF-370直流减速电机作为搬运机器人的驱动电机,以提高搬运机器人的稳定性。采用差速驱动模式,最大扭力可达4 kg/cm。
基于RF-370直流减速电机与机器人整体考虑,采用单片L298N的H桥芯片实现双路电机的驱动,最大输出驱动电流4A,7.2 V/6 A锂电池直接输出驱动电机,控制芯片对驱动芯片5,7,10,12脚输入控制电平来控制电机的转动;EnA,EnB接控制使能端,控制电机的停转。通过PWM调速方式可使电机输入使能脉冲宽度按要求变化,实现小车的前进、后退、左转、右转、停止、调速的工作[10]。
1.2.5 机械手模块设计
充分考虑搬运机器人性能,数字舵机反应更快,变速过程也更迅速、柔和;能在任意脉冲段或者任意角度中进行锁死,从而提供更大的固定力量。设计中使用MG996R数字舵机,最大拉力可达15 kg/cm,共使用3个舵机组成3自由度的机械手。
对数字舵机的控制,主要采用单片机产生的脉冲信号,即PWM信号来控制。单片机系统的控制信号的变化依靠硬件计数,受外界干扰较小、工作可靠,在脉冲宽度调节方面可实现微秒级变化。通过控制3个舵机实现三自由度机械手的控制[11]。
1.2.6 通信与显示模块设计
无线通信主要采用NRF24L01无线收发器 (包括:频率发生器、增强型 Schock Burst TM模式控制器、功率放大器、晶体放大器、调制器和解调器)。它具有高速率、多频点、低功耗的优点。通过对输出功率频道选择和协议的设置可以实现低电流待机。显示方面,主要通过NRF24L01无线模块实现机器人与PC机之间进行通信,从而将机器人工作状态体现在PC机显示屏上[12]。而智能搬运机器人自身搭载LCD12864字符型液晶用于实现机械手对搬运目标识别的计数、实现对工作现场环境变化的信息提示。
1.2.7 电源模块设计
除直接使用锂电池驱动直流减速电机外,其余均采用集成稳压器LM2596提供稳压电压。主要有为单片机提供正常工作的5 V直流电压;为机械手模块的数字舵机提供正常工作的7.2 V直流电压。
2 系统软件设计
在系统软件设计中,主要分析了系统整体的软件设计思路以及搬运目标颜色识别的软件设计思路。
2.1 系统整体软件设计思路
进行系统程序设计时,主要根据智能搬运机器人工作流程进行程序的编写[13-16]。系统软件主要包括主控模块,控制模块和检测模块3部分。系统主要实现:采集引导路径数据、提取里面引导信息、确定搬运设备自身的位置和寻找搬运目标位置、识别搬运目标、机械臂获取搬运目标、目标的搬运与堆放、搬运目标的计数以及工作现场环境的监控。软件流程图如图2所示。
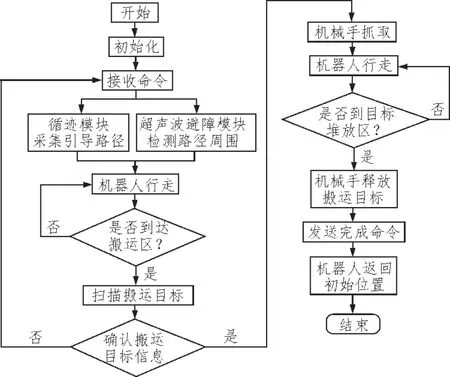
图2 系统整体软件设计流程图
2.2 搬运目标颜色识别软件设计
本设计利用TCS3200D颜色传感器模块对搬运目标进行识别[9]。首先需要对传感器模块进行初始化,即进行白平衡设置;然后通过传感器探头对搬运目标进行反射光线信息的接收;最后经过程序进行三基色分离,通过RGB三基色表格查表获取正确的颜色。该软件程序流程图如图3所示。
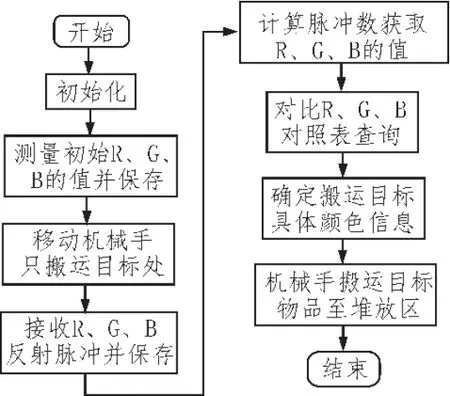
图3 搬运目标颜色识别软件设计流程图
3 结 论
基于颜色识别的智能搬运机器人系统通过系统软件和控制电路协调工作,通过采集颜色传感器数据识别确认搬运目标,利用机械手获取与释放,运载体通过超声波等传感器自动避开障碍物进行路径的优化选择,最终将搬运目标释放到目的地。实验测试结果表明,该系统性能稳定,易于操作,成本低,在工业自动化中可广泛采用。
[1]范新南,苏丽媛,郭建甲.多传感器信息融合综述[J].河海大学常州分校学报,2005,19(1):1-4.
[2]户硕.搬运机器人的设计与制作 [J].煤矿机械,2015,36(8):18-20.
[3]王登贵,于膑.基于MCU的智能搬运车控制系统设计与研究[J].煤矿机械,2014,35(5):215-218.
[4]蒋嵘,吴晨曦,蒋崢,等.一种智能寻迹与搬运机器人的控制系统设计[J].计算机测量与控制,2015,23(4):1209-1211.
[5]仇成群胡天云基于单片机的汽车防撞报警系统设计[J].现代制造工程,2010(12):119-122.
[6]朱宇,屈路,邱增凯,等.基于超声波传感器的智能车模型设计[J].实验室研究与探索,2013,32(1): 35-38.
[7]郭清.基于STC89C52的超声波测距防撞系统设计[J].仪表技术与传感器,2011(6):74-76.
[8]段志伟,高丙坤,宋金波.基于RGB颜色传感器的油品颜色检测系统设计[J].化工自动化及仪表,2013,40(8):982-985.
[9]高富强.基于RGB的颜色辨识系统设计[J].传感器与微系统,2012(10):84-87.
[10]李辉,郭文成,陈浩.基于STM32F107的搬运机器人电机控制系统设计[J].单片机与嵌入式系统运用,2012,4:36-38.
[11]何跃军,陈伟,刘先明.搬运机器人驱动系统的设计与实现[J].微特电机,2008(4):32-34.
[12]范逸之,陈立元.Visual Basic与RS-232串行通信控制(最新版).[M].北京:清华大学出版社,2002.
[13]郑剑春.机器人结构与程序设计[M].北京:清华大学出版社,2010.11.
[14]杜树青.基于Proteus和Keil C51的单片机设计与仿真[M].北京:电子工业出版社,2012.
[15]李伟光,许阳钊.一种搬运机器人控制系统的软件开发与研究[J].制造技术与机床,2010,4:84-87.
[16]白志刚.自动调节系统解析与PID整定[M].北京:化学工业出版社,2012.
[17]张伟,龚娇龙,张惠芳,等.基于视觉导航的变电站智能巡检机器人的研究[J].陕西电力,2015(6):63-66,74.
[18]丁思奎,李健.变电站巡检机器人在实际应用中存在的问题分析及解决方案[J].供用电,2016(1):80-82.
[19]刘越凡,叶海彬,刘凯.巡检机器人在500kV无人值守变电站的应用研究[J].供用电,2016(9):69-72.
[20]王欣.搬运机器人在钻杆生产线物料输送系统中的应用[J].工业仪表与自动化装置,2014(3):82-84.
Design color recognition based on intelligent transport robot
ZHENG Yong-tao1,YE Shi-tong1,ZHANG Zhao2
(1.Huali College,Guangdong University of Technology,Guangzhou 511325,China;2.Shenzhen Infiled Electronics Co.,LTD,Shenzhen 518108,China)
On the basis of the color recognition technology,this paper is about the design of intelligent transport robot.The transport robot system has the controlling core of STM32 chip which uses the wireless communication module and controlling center communication,associates the color sensor machine,manipulator arm with loading car to form an automatic handling robot guidance system for stacking small cylindrical objects of different colors and materials handling in order to reduce the utilization of labor in the process of production and improve the productivity by intelligent sorting and handling.
intelligent transport robot;manipulator;sensing;telecommunications
TN99
A
1674-6236(2017)10-0078-03
2016-05-06稿件编号:201605042
2014年度广东省大学生创新创业训练计划项目(201413656015)
郑永涛(1991—),男,广东汕头人,助理讲师。研究方向:电气工程及其自动化。