一种新型弱耦合三平移并联机器人机构及其运动学分析
2017-07-20戴志明刘晓飞沈惠平朱小蓉何宝祥
朱 伟 戴志明 刘晓飞 沈惠平 朱小蓉 何宝祥
常州大学机械工程学院,常州, 213164
一种新型弱耦合三平移并联机器人机构及其运动学分析
朱 伟 戴志明 刘晓飞 沈惠平 朱小蓉 何宝祥
常州大学机械工程学院,常州, 213164
提出一种弱耦合2RRPaR+PPaP三平移操作机器人机构,分析了机构的自由度及拓扑结构特征;推导了机构的正逆解方程以及速度、加速度模型,根据速度雅可比矩阵,分析了机构的奇异位置;根据机构的逆解方程和主要约束,采用三维极坐标边界搜索法绘制了机构的工作空间三维实体图和截面图;由ADAMS三维模型仿真和运动正解方程计算所得的位移、速度、加速度曲线基本一致,验证了运动方程的正确性。该机构解耦性好、结构简单、运动灵活,在纵向移动方向上具有部分解耦和工作空间大的优点,适合用作生产线自动操作手机构。
弱耦合;并联机械;三平移;运动学分析
0 引言
在食品加工、零件装配、医药生产等轻工行业生产线中,普遍存在着诸如分拣、拾取以及贴标等大量重复性工作,通常需要高效、快速的自动化机械手代替人工进行操作。这类机械手通常要求具备速度快、精度高、操作灵活等特点,同时,在沿输送带运动方向上,机械手的移动速度应比其他方向更快、工作空间更大[1]。
目前,用于生产线操作的并联机器人大多采用对称型三平移机构,其中最具代表性的当属CLAVEL[2]发明的Delta机器人,该机械手采用三条对称布置的球面平行四边形结构混合支链R-(SS)2,末端执行器可实现高速三维平移运动。KRUT等[3]和NABAT等[4]发明的由4条R-(SS)2混合支链构成的I4机构和Par4,黄田等[5]发明的由4条R-R-(RR)2-R混合支链构成的CrossⅣ机构,均可实现三平移一转动高速运动。近年来,出现了多种对称型三平移并联机构,如3-PUU、3-RRC[6-7]、3-UPU[6]、3-RRRPa[8](R表示转动副,P表示移动副,Pa表示4R平行四边形机构,C表示圆柱副)等拓扑结构形式,这类机构对称性好、结构简单、运动灵活,但也存在耦合性强、控制复杂等问题。而完全解耦的三平移并联机构种类较少,目前只有3-CPR[8]、3-PRRR[9]、3-PRR[10]等少数对称构型,但在高速运动操作方面并没有特别的优势。
根据前述生产线操作的具体特点,本文采用R-R-(RR)2-R混合支链设计一种新型弱耦合平面对称型三平移高速机器人机构,通过建立机构运动学方程并分析其工作空间、奇异位形等运动学性能,为机器人结构设计及工程应用提供理论基础。
1 机构设计与拓扑分析
设计2RRPaR+PPaP(下划线表示驱动副)三平移抓放机械手三维模型如图1所示。动静平台由3条主动支链连接,其中2条平面对称支链为RRPaR结构,支链转动副由电机驱动;中间支链为PPaP结构,上移动副通过同步带驱动,可实现机械手沿运输带纵向移动。

图1 三维模型Fig.1 3D model of the robot
机构原理简图见图2。在中间支链上移动副中心O点(初始位置和定平台中心重合)建立笛卡儿坐标系Oxyz,x轴平行于OA1方向,z轴竖直向上,根据右手定则确定y轴沿中间移动副导路方向。2条RRPaR对称支链中,Ai、Bi、Ci(i=1,2)处的转动副轴线均平行于y轴方向,4R平行四边形(Pa)中的R副轴线与Ci点处的转动副轴线垂直,该支链末端构件可实现三平移一转动运动。中间支链中,O点处移动副轴线沿y轴方向,E点处移动副平行于z轴,4R平行四边形中的R副轴线垂直于xz平面,该支链末端可实现三平移运动。

图2 机构原理图Fig.2 Schematic diagram of mechanism
根据方位特征理论[11],机构动平台中心P点的运动输出方位特征(POC)集为
式中,ν为机构的回路数,ν=2;t、r分别为移动和转动特征;Mbj为第j条支路末端构件的POC集。
可见,该机构可实现三平移运动输出,其运动特征取决于中间支链,这种支链称为恰约束支链[12-13]或方位特征支链[14]。另外,根据机构结构特征,机构沿y轴方向的移动取决于中间支链的驱动副移动范围,不受2条RRPaR支链的影响,因此该机构具有部分解耦的特点。
2 机构位置分析
2.1 位置逆解
根据图2中建立的坐标系,设2条对称支链RRPaR的驱动杆AiCi与x轴夹角分别为θ1、θ2,OAi和PBi的长度分别为a、b,l1、l2分别为AiCi杆和BiCi杆的长度。中间支链沿y轴的位移为s,动平台中心P点坐标为(xP,yP,zP)T,A1、A2点的位置坐标分别为A1=(a,0,0)T,A2=(-a,0,0)T,则Bi点、Ci点的坐标分别表示为
根据BiCi杆杆长约束条件
‖Ci-Bi‖=l2
(1)
可得运动方程为
(2)
根据式(2),整理可得
Gi1sinθi+Gi2cosθi+Gi3=0i=1,2
(3)
G11=2(a-b-xP)2l11G12=-2l2zP
G21=2(a-b+xP)2l21G22=-2l21zP
由此可求解机构的逆解方程为
(4)
2.2 位置正解
已知支链驱动杆输入分别为θ1、θ2,中间支链沿y轴位移为s,则式(2)可转化为如下形式:
(5)
i=1,2
E1=b-a-l1cosθ1E2=a-b+l1cosθ2
Fi=l1sinθi
由于式(5)为二元二次方程组,可求得机构的正解方程如下:
(6)
该机构由于耦合度低,故可以求得正解的连续方程,且x、z方向的运动只与机构支链的输入角度有关,y方向的运动只取决于中间支链的移动,均有利于机构的轨迹规划与控制程序的简化。
3 速度、加速度分析
3.1 速度分析

式(2)两边同时对时间求导,整理后,可得速度方程:
(7)
Jq11=1
Jq22=(xP-a+b-l1cosθ1)l1sinθ1+
(zP-l1sinθ1)l1cosθ1
Jq33=(xP+a-b+l1cosθ2)l1sinθ2+
(zP-l1sinθ2)l1cosθ2
若JX非奇异,则

(8)
J=(JX)-1Jq
式中,J为机构雅可比矩阵。
若Jq非奇异,则
(9)
J-1=(Jq)-1JX
式(8)、式(9)分别为机构速度的正反解方程。
3.2 加速度分析
对式(7)两边求导,整理得
(10)



若JX非奇异,则
(11)
若Jq非奇异,则
(12)
式(11)、式(12)分别为机构加速度的正反解方程。
4 奇异分析
机构的奇异状态可通过速度雅可比矩阵JX和Jq进行判断。
4.1 逆解奇异
机构逆解奇异发生的条件为
(13)
根据式(7),对应Jq22=0或Jq33=0,整理后得
(14)
或
(15)
由式(14)对应的机构平面位置如图3a所示,此时,B2C2与B1B2共线;当式(14)、式(15)均满足,则机构平面位置如图3b所示,B2C2、B1B2、B1C1均共线,此时,机构无法承受竖直方向的载荷,从而失去控制。由图3结构可知,当l1>l2时,有可能发生这种奇异,若要避免这种奇异,设计时要使l1 (a)满足式(14)的机构平面位置 (b)满足式(14)、式(15)的机构平面位置图3 逆解奇异Fig.3 Singular of inverse solution 4.2 正解奇异 机构正解奇异发生的条件为 (16) 根据式(16)整理后可得 (xP-b+a)sinθ2+zPcosθ2=0 (17) 式(17)化简、整理后可得 (18) 此时机构到达工作空间边缘位置,AiCi与BiCi拉直共线(图4a)或重叠共线(图4b)。 当det(JX)=0,det(Jq)=0时,则可能出现正解奇异和反解奇异的混合情况,称为混合奇异。此外,为了描述方便,文中仅将RRPaR支链中平行四边形简化为BiCi杆进行分析,而平行四边形闭合支链本身也会出现奇异位形,文献[15]对此作了详细描述,这里不再赘述。 工作空间的约束包括杆长约束和角度约束。 (a)AiCi与BiCi拉直共线 (b)AiCi与BiCi重叠共线图4 正解奇异Fig.4 Singular of forward solution 本机构主要包括驱动角度约束和移动杆长约束,约束条件可以表示为 (19) qmax=l2cosαi 式中,θmax、θmin为驱动角最大值、最小值;qmax为沿y轴移动的单向最大距离;αi为支链中平行四边形所夹锐角。 考虑到中间支链对机构运动的约束,根据OE杆长约束条件,可得 (20) 式中,l3为OE杆杆长;l4为PE杆杆长。 由于生产线中沿运输带方向(即沿y轴方向)需要较大的工作空间,尽管沿y轴方向的移动具有解耦性,但根据式(19),其移动范围s受到l2长度的限制,因此BiCi杆长应取较大值。同时考虑机构的对称性以及转动副的实际运动能力,设定机构的几何参数如表1所示。选择动平台中心P点作为参考点,根据机构的有效可达空间,搜索高度h区间设定为[0, -800] mm。 表1 机构参数 通过极坐标搜索法对机构工作空间进行搜索,所得工作空间如图5所示。图5a为三维工作空间实体图,显示本机构可达工作空间范围较大,连续性较好。由于机构的两条RRPaR支链对称布置,因此工作空间形状是一个关于xz平面完全对称的空间体,投影如图5b、图5c、图5d所示。对工作空间图形沿y轴方向进行剖层分析,当y=0时,截面图显示无空洞,如图5e所示。随着y轴沿正方向移动,截面形状向x轴两端以及z轴正方向扩大,可见机构的工作空间连续性良好,表示在此平面内,动平台参考点P可到达该平面范围内的任意位置,如图5f所示。当y=300 mm以上时,机构z轴方向上可达最低点明显上升,表面工作空间到达极限位置,图形开始逐步收敛,如图5g、图5h所示。机构在y轴负方向运动空间形状与正方向一致,关于xz平面对称。 (a)三维图 (b)xy投影图 (c)xz投影图 (d)yz投影图 (e)y=0 (f) y=200 mm (g)y=300 mm (h)y=450 mm图5 工作空间Fig.5 Workspace of the mechanism 可见,机构的工作空间在所给定参数范围内具有良好的连续性,沿y轴方向的工作空间主要取决于l2及沿y轴移动的距离,l2越大,工作空间越大,且该机构的工作空间具有良好的对称性。 设定机构的结构参数如表1所示,驱动输入按下式给定的函数: (21) 根据上述运动正解方程(式(6)、式(8)、式(11)),采用MATLAB编程分别求解位移、速度、加速度曲线。为了验证运动数学模型的正确性,采用同样参数在ADAMS环境中建立机构的三维仿真模型。 由于沿y轴方向的输入s是解耦的,对其他方向的运动不产生影响,因此这里只绘制了x轴、z轴方向运动输出曲线。经仿真,可得机构位置正解的运动曲线如图6所示。图6a、图6b分别为x轴、z轴方向的位移曲线,图6c、图6d为速度曲线,图6e、图6f为加速度曲线。图中,实线表示由ADAMS三维模型所得的运动曲线,而虚线表示由上述推导的机构正解运动方程所得曲线。由图6可知,两者所得运动曲线基本一致,从而验证了上述所建立的位移、速度、加速度运动正解方程的正确性。 (1)根据生产线用操作手的工作特点,设计了一种2-RRPaR+PPaP三平移弱耦合并联机器人机构,该机构具有对称性好、结构简单、控制方便、运动灵活快速的特点。 (2)以机构杆长为约束条件,建立了机构的运动正反解方程。根据速度雅可比矩阵,分析了机构的正解奇异和反解奇异情况,为机构参数设计提供了参考。 (3)采用极坐标搜索法,绘制了机构工作空间的三维图形及其剖层图,表明机构的工作空间连续,沿y轴方向具有较大的工作空间,满足生产线工作的实际需求。 (a)动平台沿x轴方向位移 (b)动平台沿z轴方向位移 (c)动平台沿x轴方向速度 (d)动平台沿z轴方向速度 (e)动平台沿x轴方向加速度 (f)动平台沿z轴方向加速度图6 运动学分析曲线Fig.6 Curves of kinematics analysis (4)分别根据运动方程和三维仿真模型绘制了机构的位移、速度、加速度曲线,二者高度接近,表明了所建立的运动学方程的正确性。 [1] RYNALDO, ZANOTELE, HEMERLY, et al. Structural Synthesis, Dynamic Modeling and Analysis of a 3-DOF Asymmetric Parallel Mechanism [C]// 13th World Congress in Mechanism and Machine Science. Guanajuato, México,2011:19-25. [2] CLAVEL R A. Fast Robot with Parallel Geometry [C]// Proceedings of 8th International Symposium on Industrial Robots. Sydney, 1988:90-100. [3] KRUT S, BENOIT M, OTA H, et al. I4: A New Parallel Mechanism for SCARA Motions[C]// Proceedings of the IEEE International Conference on Robotics and Automation. Taibei, China: IEEE, 2003: 1875-1880. [4] NABAT V, COMPANY O, KRUTS, et al. Par4: Very High Speed Parallel Robot for Pick-and-place[C]// Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. New York: IEEE, 2005:1202-1207. [5] 黄田,赵学满,梅江平,等. 一种具有三维平动一维转动的并联机构:中国,ZL201220007884.X[P]. 2012-11-14. HUANG Tian ,ZHAO Xueman,MEI Jiangping, et al. A Parallel Mechanism with Three Translations and One Rotations: China,ZL201220007884.X[P]2012-11-14. [6] 尹小琴,马履中. 三平移并联机构3-RRC的工作空间分析[J]. 中国机械工程, 2003, 14(18):1531-1532 YIN Xiaoqin, MA Lüzhong. Workspace Analysis of a 3-DOF Translation Parallel Mechanism of 3-RRC[J]. China Mechanical Engineering, 2003, 14(18):1531-1532 [7] 尹小琴,杨启志,马履中,等.3-RRC 并联机构的变拓扑结构及其特性分析[J]. 中国机械工程, 2006, 17(24):2531-2534. YIN Xiaoqin,YANG Qizhi,MA Lüzhong. Variable Topological Structure of Parallel Mechanism 3 - RRC and Its Characteristic Analysis[J]. China Mechanical Engineering, 2006, 17(24):2531-2534. [8] 黄真,李秦川.三自由度移动并联机器人机构:中国,CN1311083[P]. 2001-09-05. HUANG Zhen,LI Qinchuan. Three Degrees of Freedom Mobile Parallel Robot Mechanism: China,CN1311083[P]. 2001-09-05. [9] KONG Xianwen, GOSSELIN C M. Type Synthesis of in Output Decoupled Parallel Manipulator[J]. Translations of the Canadian Society for Mechanical Engineering, 2004,28(2):185-196. [10] LI W M, GAO F, ZHANG J J, et al. A Decoupled Parallel Manipulator only with Revolute Joints[J]. Mechanism and Machine Theory, 2005,40(4):467-473. [11] 杨廷力. 机器人机构拓扑结构学[M]. 北京:机械工业出版社,2004. YANG Tingli. Robot Mechanism Topology[M]. Beijing: Machinery Industry Press,2004. [12] 黄田,李矇,吴孟丽,等. 可重构PKM模块的选型原则——理论与实践[J]. 机械工程学报, 2005, 41(8): 36-41. HUANG Tian, LI Meng, WU Mengli, et al. Criteria for Conceptual Design of Reconfigurable PKM Modules—Theory and Application[J]. Chinese Journal of Mechanical Engineering,2005,41(8):36-41. [13] 刘萍莉. 含有中间约束分支的三自由度并联机构综合与性质研究[D]. 秦皇岛:燕山大学, 2007. LIU Pingli. Study on the Synthesis and Properties of 3-DOF Parallel Mechanism with Intermediate Constraint Branches[D]. Qinhuangdao: Yanshan University,2007. [14] SHEN Huiping, YANG Liangjie, ZHU Xiaorong, et al. A Method for Structure Coupling-reducing of Parallel Mechanisms[C]// The 2015 International Conference on Intelligent Robotics and Applications. Portsmouth UK: 2015, 199-210. [15] 朱伟,耿林,许兆棠,等. 含4R回路并联机构奇异位置分析[J]. 机械传动,2016,40(3):17-22 ZHU Wei, GENG Lin, XU Zhaotang. Singular Position Analysis of Parallel Mechanism with 4R Circuit[J]. Journal of Mechanical Transmission, 2016,40(3):17-22 (编辑 王艳丽) A Novel Weak-coupling Three-translation Parallel Robot Mechanisms and Its Kinematics Analysis ZHU Wei DAI Zhiming LIU Xiaofei SHEN Huiping ZHU Xiaorong HE Baoxiang School of Mechanical Engineering, Changzhou University, Changzhou,Jiangsu,213016 A weak-coupling three-translation parallel robot mechanisms was introduced, which was composed of two RRPaR branches and one PPaP. Firstly, the topological structural characteristics and DOF of the mechanism were analyzed through POC(position and orientation characteristics) theory. Secondly, the forward and inverse solutions of the mechanism and the model of velocity and acceleration were derived. Based on the speed Jacobi matrix, the singular positions of the mechanism were analyzed. According to the inverse solution equations and the main constraints of the mechanism, 3D polar boundary search method was used to draw the 3D solid and sectional drawings of the mechanism. The displacement, velocity and acceleration curves obtained from the solid model and mathematical model were basically consistent, which verified the correctness of the motion equations. The mechanism has the advantages of good decoupling performance, simple structure and flexible movement, and has the advantages of partial decoupling and large working spaces in the longitudinal direction of movement, and is suitable for the automatic operations of the automata structures for production lines. weak-coupling; parallel mechanism; three-translation; kinematics analysis 2016-07-15 国家自然科学基金资助项目 (51075045);江苏省自然科学基金资助项目(BK20161192);江苏省产学研前瞻项目(BY2015027-24) TH112 10.3969/j.issn.1004-132X.2017.13.008 朱 伟,男,1976年生。常州大学机械工程学院副教授。主要研究方向为机器人机构学。E-mail:80498761@qq.com。戴志明,男,1990年生。常州大学机械工程学院硕士研究生。刘晓飞,男,1990年生。常州大学机械工程学院硕士研究生。沈惠平,男,1964年生。常州大学机械工程学院教授。朱小蓉,女,1972年生。常州大学机械工程学院副教授。何宝祥,男,1966年生。常州大学信息工程学院教授。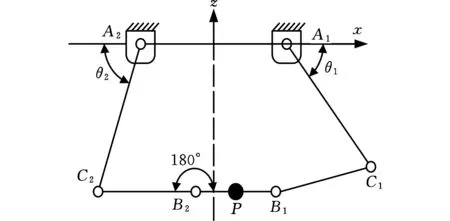

5 工作空间分析







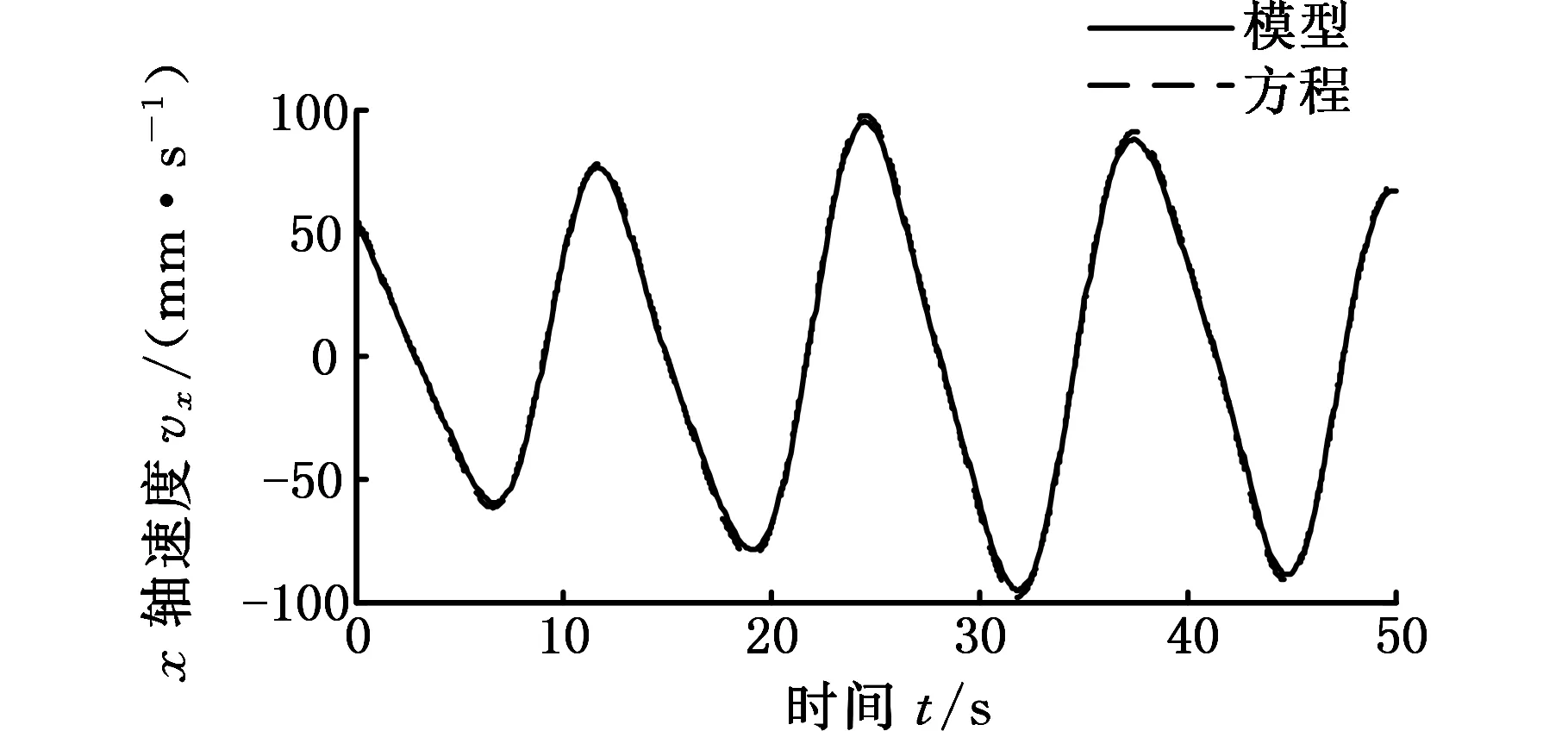
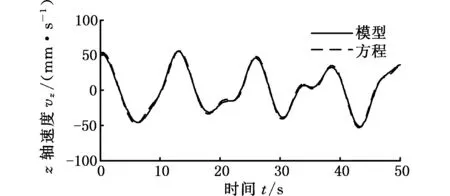
6 模型求解与验证
7 结论