海底冷泉探测系统的研制及应用
2017-07-18温明明郭霖牟泽霖万芃冯强强
温明明,郭霖,牟泽霖,万芃,冯强强
(1. 国土资源部海底矿产资源重点实验室,广州海洋地质调查局,广州 510075;2. 中国科学院声学研究所东海研究站,上海 200032)
海底冷泉探测系统的研制及应用
温明明1,郭霖2,牟泽霖1,万芃1,冯强强1
(1. 国土资源部海底矿产资源重点实验室,广州海洋地质调查局,广州 510075;2. 中国科学院声学研究所东海研究站,上海 200032)
“羽状流”是天然气水合物分解形成的甲烷气体渗漏或喷涌出海底的一种地质现象,是冷泉区的一个重要特征。针对这一特征,作者研制了一套冷泉探测系统。本文从声学探测原理、仿真验证、设备测试三个方面介绍了冷泉探测系统的技术指标及各项功能。该系统在南海北部海域海上试验工作中,在水深900 m处成功发现了海底以上高约200 m,宽约80 m的“羽状流”海底异常特征。
羽状流;冷泉;天然气水合物;探测
1 引言
海底冷泉是指来自海底沉积地层的气体以喷涌或渗漏方式逸出海底的一种海底地质现象,是判断天然气水合物藏的一个重要特征,其发育和分布一般与天然气水合物分解和海底天然气及石油分解运移密切相关,目前已成为指示现代海底发育或尚存天然气水合物最有效的标志之一。天然气水合物分解形成的甲烷以气体的形式渗漏或者喷溢到上覆水体中,在气源充足的情况下将会形成气泡羽状流,是冷泉探测的主要特征[1,2]。
从理论上讲,以多波束、浅剖、侧扫声纳、测深仪等为代表的海洋声学探测技术,由于其发射频率均可达到数万乃至数十万赫兹以上,其理论探测分辨率均可满足海底冷泉气柱的探测。国内外也有利用测深仪获取海底冷泉声学特征现象(“羽状流”)的先例[1,3],如图1和图2。但是,已有的这些设备其声波发射频率基本固定,除非其发射频率恰好响应目标气柱的共振频率,否则探测到未知的冷泉气柱难度较大。因此,针对海底浅层气逸出气泡水体反射信号较弱的特点,利用声学共振原理并结合声纳探测技术,研制出一套专门针对海底冷泉水体的回声反射探测系统,该系统采用近船底安装(或船底安装)方式,用于冷泉区羽状流的快速检测[4,5]。

图1 挪威外海斯匹次卑尔根岛附近海域天然气水合物冷泉探测[3]

图2 俄罗斯鄂霍次克海天然气水合物冷泉探测[1]
2 设备研制
2.1 海底冷泉声学探测原理研究
2.1.1 原理概述
当海底冷泉气泡溢出海底后,由于水体、气泡之间物性的巨大差异,海水中大量气泡造成海水层的不均匀。声学理论认为:声波在传播过程中遇到介质不均匀处会发生散射,从不均匀处向各个方向发射散射波。探测海底浅层气逸出气泡的方式就是通过在有源模式下,从气泡测得的回波,根据声纳方程:
RL=SL-TL+10log(V)
(1)
式中:RL—接收信号级,dB;
SL—声源级,dB,在1 m处单位能量损耗率为1 μP;
V—散射体积,m3;
TL—传播损失,由公式(2)计算。
TL=2[20log(r)+αr/1000]
(2)
式中:r—声学发射器与气泡散射处的距离,m;
α—海水的衰减系数。
在气泡的共振频率附近,气泡表面随声波振动,散射有很大变化。水中的气泡在共振时激发强的二次谐波,气泡在声波驱动下,气泡壁做受迫振动,遵循Rayleigh—Plesset方程,共振时振幅很大,产生强烈的非线性振动,非线性振动又成为二次谐波声压的源,从而声场表现为强非线性衰减,将声能向四周散射出去。水中的气泡以尖锐峰值共振形式进行振动运动,气泡附近水的运动被随气泡体积而变化的内部压力所控制,气泡象空洞一样,周围的水体成为声学振子的振动块[6-9]。
基于以上的分析,可知当回声反射系统的工作频率与气泡共振频率相同时将发生共振,共振时的气泡声学目标最大、强度最强,气泡最容易探测到,因此回声反射系统的工作频率选择是关键。
2.1.2 近海底水体中气泡共振频率研究
海水中气泡的主要声学特征包括气泡大小、气体含量、声速、衰减、共振频率、散射截面等。其中,影响水中气泡探测的最主要因素为共振频率,共振频率又受到气泡尺寸、气泡深度的影响。下面对气泡的共振频率进行分析。
共振频率自1932年以来经过Minnaert、Smith、Shima等人的逐渐完善深化,已经能较精确地计算出气泡共振频率[10-12]。在某一频率下,给定尺寸的气泡与激发声波共振,这个频率为[6,9]:
(3)
式中:γ—气体的比热比;
P0—流体静压力;
ρ—水的密度;
r0—气泡半径。
在海水深度为d处,上式可简化为公式(4):
(4)
式中:f0—共振频率,Hz;
r0—气泡半径,cm;
d—水深,m。
根据公式(4)和已有研究计算可知常见气泡的共振频率在10~60 kHz的频率范围内,考虑到高频声信号在海水中的吸收比较大,因此回声反射探测系统的工作频率选在10~20 kHz。
2.1.3 气泡散射截面研究
在共振时,气泡受声波激发产生共振,具有最大的散射截面。Spitzer给出了一个理想的(无损失的)气泡散射横截面的表达式[13]:
(5)
式中:r0—气泡直径;
f0—共振频率,Hz;
f—入射声波频率,Hz;
k—共振时波数。该截面在共振时有一最大值,而在偏离共振频率时,随频率偏移而减小。

图3 气泡的水中散射截面/几何截面与频率的关系曲线
小气泡(r0≤λ)在水中的散射截面随频率变化的关系见图3所示。横轴代表入射声波频率与共振频率比值,纵轴代表气泡散射截面与几何截面比值。图中δT为总阻尼常数;δs=1.36×102,为散射引起的阻尼常数。图中两条曲线分别为小气泡在理想情况与实际情况下散射截面/几何截面随频率变化的曲线。由图可知,低于共振频率时,气泡散射很小,与频率的四次方成正比;等于共振频率时,气泡迅速达到最大的散射截面;高于共振频率时,散射截面迅速减小,在10倍共振频率附近,气泡散射截面是常数,其是气泡几何截面的4倍;声波频率再增大时,散射截面减小到等于其几何截面。
2.2 系统设计与仿真验证
根据确定的系统探测频率10~20 kHz、发射功率3 kW、探测水深2000 m等一系列参数,进行系统仿真和验证。
系统探测频率10~20 kHz,不失一般性取中心频率15 kHz进行计算。
(1)f=15 kHz,则波长λ=0.1 m;
(2)功率放大器发射功率3 kW,电声转换效率取η=0.5,则发射声功率为PA=1.5 kW;
(3)换能器基阵设计成长方体,长1 m,宽0.1 m,辐射面积S=0.1 m2,则基阵的指向性指数为:
(6)
(4)换能器基阵辐射出的声信号源级为:
SL=171.5+10log(PA)+DI=224dB
(7)
(5)15 kHz的声信号在海水中吸收系数取2.3 dB/km,探测水深2000 m的吸收损失为4.6 dB,扩展损失为20 logR=66 dB,因此传播损失TL=71 dB;
(6)目标散射强度取TS=-70 dB,检测阈DT= 10 dB,根据声纳方程可得接收信号级为RL=SL-2TL+TS=12 dB>DT=10 dB,计算机仿真结果如图4所示。
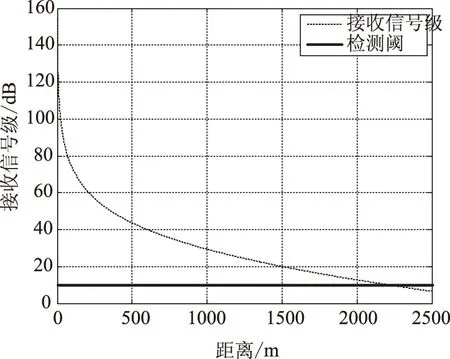
图4 计算机仿真结果
根据上述计算仿真结果可得接收信号级大于检测阈,系统正常工作。
2.3 设备研制及测试
根据设备研制的进度,分别在莫干山水库试验场进行了三次湖上试验。在试验中使用空压机模拟冷泉生成气泡,主要测试了设备以下方面的性能:不同发射频率的声源级;基阵的水平和垂直波束开角;工作频率范围;声源级指标;最大发射功率;发射脉冲宽度;系统的最大作用距离(探测最大水深)。
系统主机和发射机测试完成后,各模块功能测试均正常,将系统集成在一起进行实验室测试,整机测试平台测试结果正常。系统的控制和声学图像显示在控制软件中实现,可通过软件设置探测距离、发射信号形式、工作频段、发射功率、增益控制、声学图像分辨率等参数。显控软件主界面如图5所示,左边为参数控制区,右边为声学图像显示区。

图5 软件主界面
最终,确定设备的主要技术指标见表1。

表1 试验系统工作参数
3 海上试验及数据采集
冷泉探测系统搭载广州海洋地质调查局的“奋斗五号”地质调查船,在南海北部海域开展试验调查,调查位置的选取结合前期利用多波束和浅地层剖面手段发现的冷泉疑似点(图6),以该点坐标为中心,沿着147°方向布设9条主测线,垂直主测线方向布设9条联络测线。另外,根据作业需要以冷泉异常点为中心布设了一条正东西测线和两条正南北测线(图 7)。

图6 多波束水体影像和浅剖剖面显示的疑似冷泉声学特征发现的冷泉疑似点

图7 试验测线布设图
试验区域水深在800~1400 m之间,测量作业时,换能器基阵采用船舷固定安装的形式,吃水深度4 m,船速2~6 kn,导航定位信息使用差分GPS信号。试验系统如图8所示,图8a是海试中安装在船上实验机柜上的设备水上部分,图8b是水下部分的换能器基阵。
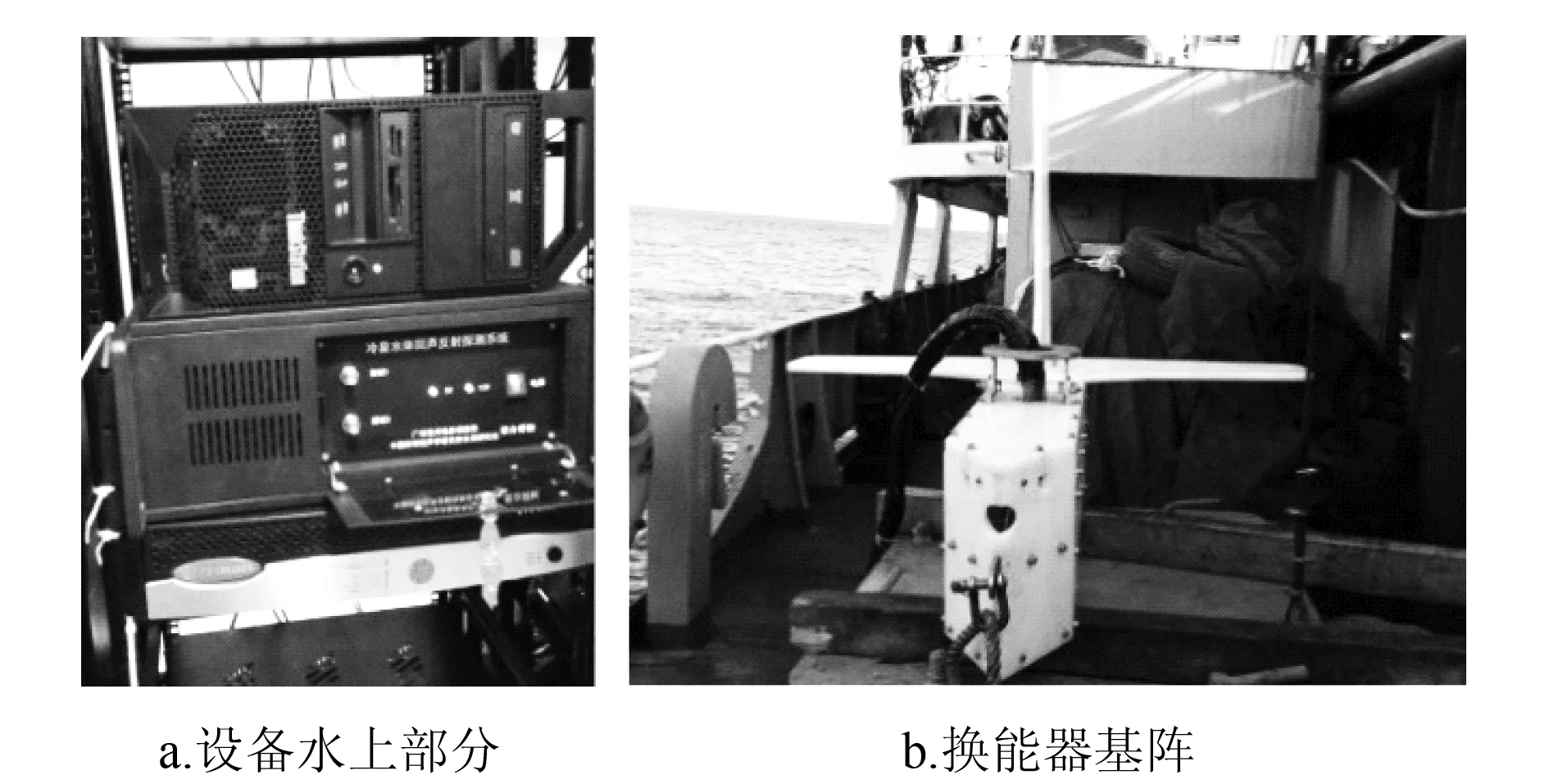
图8 设备实物图
本次海上试验在冷泉疑似点(水深870 m)附近成功探测到“羽状流”冷泉气柱,气柱高度约200 m,宽度约80 m。该冷泉气柱在冷泉点附近的测线均可以探测到,图9和图10分别是沿测线L1和SN2测线的观测结果。
图9为沿L1测线两个不同方向获取的试验剖面,中心频率15 kHz,左图船速2 kn,测线方向57°,右图船速4 kn,测线方向237°,两次均在已知的冷泉疑似点附近发现了海底羽状流特征信号。从剖面对比中可以看出,两个剖面中海底羽状流的高度相差不大,均为200 m左右,由于两次作业速度相差一倍,造成了图9左边羽状流的宽度近似为图9右的两倍。

图9 L1测线观测结果
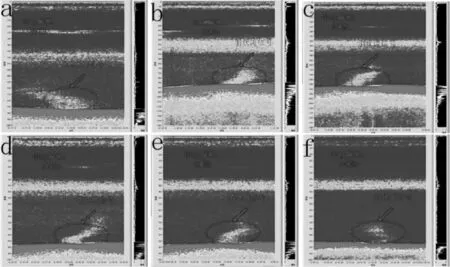
图10 沿SN2测线进行频率对比试验
在海试过程中,进行了不同中心频率对比试验,选取测线SN2,图10为沿测线SN2获取的试验剖面(a:船速2.5 kn,测线方向180°,b:船速4.6 kn,测线方向0°,c:船速5.2 kn,测线方向0°,d: 船速4.7 kn,测线方向0°,e:船速4.7 kn,测线方向0°,f:船速2.9 kn,测线方向180°),发射信号的中心频率分别从14~20 kHz,从图10 可以看出信号中心频率为14~18 kHz时,均可以清晰探测到羽状流特征信号,而信号中心频率20 kHz时,探测的海底羽状流特征信号较模糊,表明该冷泉点气泡的共振频率在14~17 kHz之间。
4 结论
海底冷泉水体回声反射探测系统把接收到的声信号按照声波强度的高低转换成灰度像素,提取特征参数,结合水体回声反射图像处理技术,最终形成逸出气泡的图像,根据声学成像和逸出气泡的特征,来判别是否为“冷泉”。所研制的探测系统经过探测方法理论研究、仿真验证、设备研制,三次湖上试验和系统性能指标测试后,在南海北部开展了试验性应用调查,在冷泉疑似点附近成功探测到“羽状流”气柱,不仅验证了先前调查手段的正确性,还进一步证实了研制设备探测结果的准确度及声学综合探测技术在冷泉探测方面的可靠性。
[1] 栾锡武, 赵克斌, A.Obzhirov,等. 鄂霍次克海浅表层天然气水合物的勘查识别和基本特征[J]. 中国科学:地球科学, 2008(1):99-107.
[2] 顾兆峰, 刘怀山, 张志珣. 浅层气逸出到海水中的气泡声学探测方法[J]. 海洋地质与第四纪地质, 2008, 28(2):129-135.
[3] Sauter E J, Muyakshin S I, Charlou J L, et al. Methane discharge from a deep-sea submarine mud volcano into the upper water column by gas hydrate-coated methane bubbles[J]. Earth & Planetary Science Letters, 2006, 243(3-4):354-365.
[4] 石杨, 温明明, 郭霖. 水中气泡声学快速探测方法研究[J]. 声学技术, 2014, 33(6): 21-24.
[5] 温明明, 牟泽霖, 万芃, 等. 一种深海水体散射目标探测方法[J]. 声学技术, 2016, 35(6):512-517.
[6] 尤立克. 水声原理[M]. 哈尔滨: 哈尔滨船舶工程学院出版社, 1990.
[7] 马大猷. 现代声学理论基础[M]. 北京: 科学出版社, 2004.
[8] 顾金海, 叶学千. 水声学基础[M]. 北京: 国防工业出版社,1981.
[9] 刘伯胜, 雷家熠. 水声学原理[M]. 哈尔滨: 哈尔滨工程大学出版社, 2002.
[10]M. Minnaert Sc.D. XVI. On musical air-bubbles and the sounds of running water[J]. Philosophical Magazine, 1967, Edinburgh(104):235-248.
[11]F.D. Smith D.Sc. M.I.E.E. XCVIII. On the destructive mechanical effects of the gas-bubbles liberated by the passage of intense sound through a liquid[J]. Philosophical Magazine, 1969(130):1147-1151.
[12]Shima A. The Natural Frequency of a Bubble Oscillating in a Viscous Compressible Liquid[J]. J Basic Engineering, 1970, 92(3):555-561.
[13]SPITZER L JR. Acoustic properties of gas bubbles in a liquid[R]. COLUMBIA UNIV NEW YORK, 1943.
Development and Application of the Detection System for Cold Seep in Sea Bottom
WEN Mingming1, GUO Lin2, MOU Zelin1, WAN Peng1, FENG Qiangqiang1
(1. Guangzhou Marine Geological Survey, Guangzhou 510075, China;2. Shanghai Acoustics Laboratory, Chinese Academy of Sciences, Shanghai 200032, China)
“Bubble Plume” is a geological phenomenon that is the gas hydrate leaking or spewing out of the sea bottom and a special feature of the cold seep area. The authors developed a set of cold seep detection system according to this feature. This paper introduces the technical parameters and functions of the system from the acoustic principle, simulation verification and equipment testing. In the sea test,the system successfully detect the anomaly characteristics of a cold seep which is 200 meters high above the sea bottom and 80 meters wide in the 900 meters deep area.
bubble plumes;cold seep;gas hydrate; detection
2017-05-10
国家863计划(2013AA092501);国家重点研发计划(2016YFC0303900)。
温明明(1976-),男,广州海洋地质调查局技术方法所高级工程师,主要研究方向为海洋地球物理,Tel:13544399196,E-mail:wenmm@21cn.com
P631
A
1009-282X(2017)03-0019-05
