基于HSV颜色空间的车身颜色识别算法
2017-07-18胡焯源曹玉东
胡焯源,曹玉东,李 羊
(辽宁工业大学 电子与信息工程学院,辽宁 锦州121001)
基于HSV颜色空间的车身颜色识别算法
胡焯源,曹玉东,李 羊
(辽宁工业大学 电子与信息工程学院,辽宁 锦州121001)
利用颜色空间进行车辆颜色识别,在4种颜色空间模型中比较了车身颜色识别效果,在HSV模型中识别效果最好。针对外界光线变化严重影响车身颜色识别的问题,改进了的HSV颜色模型的颜色量化模板和颜色判定规则。实验表明,改进的方法能有效地提高识别精度。
颜色识别;HSV颜色空间;色差距离
车辆信息识别是智能交通系统中的重要组成部分。车辆信息识别中发展最为成熟的是车牌识别技术,但随着车辆的不断增多,车辆的管理工作越来越繁琐,因此需要利用车辆的其他信息(如车辆品牌信息,车身颜色信息等)来满足需求。车身颜色识别就是其中一个重要方向。目前研究该方向的机构和论文还不是很多,市场上也没有很成熟的产品,因此还需要不断研究。
目前的车身颜色识别算法[1]大致分为两类:一类是采用基于颜色空间的色差方法,色差是指两种颜色的欧式距离,根据距离的大小来判断颜色的差异程度。第二类是制作颜色模板,提取颜色特征,采用分类器进行识别。Michelel[2]在非均匀的RGB颜色空间中将车身颜色细化成15种颜色,采用K近邻算法进行颜色识别。但RGB颜色模型并不是人眼直观的颜色描述方法,仅仅通过欧式距离并不能准确地区分它们在色度上的差异。李贵俊等[3]研究了多种颜色空间,采用识别效果最好的HIS颜色空间和标准色差公式,针对外界噪声和光照等因素的影响,对图像在HIS空间中进行色彩归一化处理。杨峰[4]将车身颜色分为9种,研究彩色图像去舞算法和颜色直方图特征,采用支持向量机算法进行颜色识别,但采用分类器的算法,制作样本比较繁琐,且识别的类别有局限。
本文针对光照改变车身颜色的问题,提出改进的颜色空间量化范围和颜色判定规则的方法,有效的提高了识别率。
1 颜色空间转换
颜色空间也称彩色模型,其中最常见的是RGB模型。RGB模型常用作图像的描述,但在颜色识别时一般不采用RGB颜色模型,因为它主要描述的是红、绿、蓝三原色的颜色通道模型,将颜色识别常用的色调、亮度和饱和度3个参数融合在一起,很难分开,而HSV、YUV等颜色空间则能更加直观地区分色彩。
1.1 HSV颜色空间
HSV模型是直观的颜色描述方法,定义在颜色坐标系中的圆锥,如图1所示。饱和度S沿水平轴测量而明度值沿通过圆锥中心的垂直轴测量。明度值V从圆锥底部的0变化到顶部的1。色彩在HSV模型中用圆锥顶面圆形的角度来表示。蓝色位于240°处,黄色位于60º处,互补的颜色呈180°。
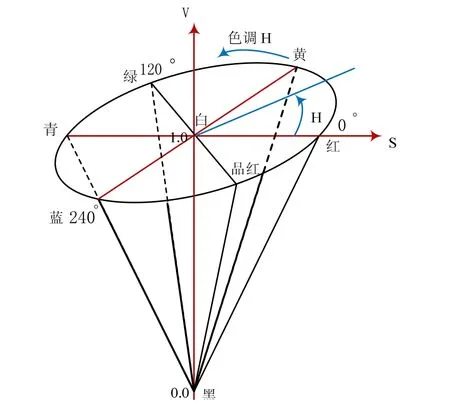
图1 HSV颜色空间模型
饱和度S对应的是圆锥顶面圆形的水平轴,在圆心点处为1,与圆形相交处为0。在模型中它表示所选色彩的纯度与该色彩最大纯度的比率。明度V是从圆锥顶点到底面圆形的圆心点的变化。在模型中它也是从0到1的变化,同样表示所选色彩与该色彩最大明度的比率。
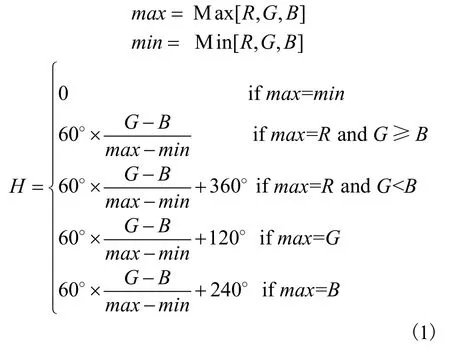
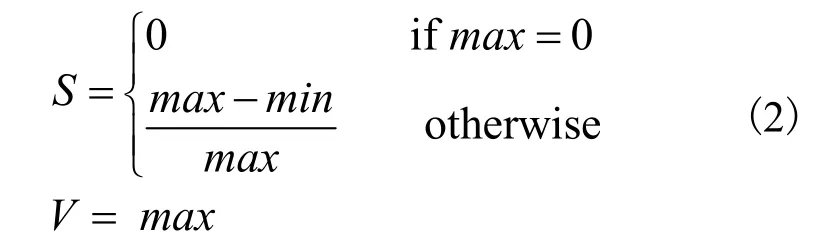
RGB转化到HSV的转换公式如下:
1.2 CIELab彩色空间
CIELab使用对色坐标轴b*,a*和L*定义CIE颜色空间。其中,L*值代表光亮度,其值从0(黑色)到100(白色)。b*和a*代表色度坐标,其中a*代表红-绿轴,b*代表黄-蓝轴,它们的值从0到10。a*=b*=0表示无色,因此L*就代表从黑到白的比例系数。
RGB无法直接转化成CIELab,要先转换成XYZ,再转换成Lab,转化公式如下:
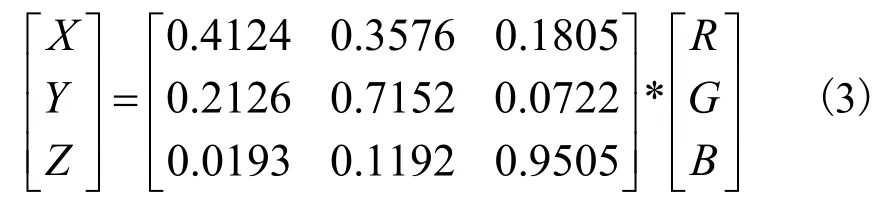
其他情况,则为:
2 颜色空间量化和色差距离判断
标准的HSV颜色空间是根据H、S和V三者在圆锥模型中的相互变化关系量化出标准的色彩模板。本文为了识别常见的车身颜色,将颜色空间量化为彩色区域和非彩色区域,彩色区域细化为红色、蓝色、绿色、黄色、棕色和青色,非彩色区域细化为,黑色、白色和银灰色。
HSV颜色空间中3个分量之间彼此独立,但是考虑到其圆锥体的颜色分布特性[5],可以知道H、S和V这3个分量之间的关系,当明度V非常高或非常低时,色调H将毫无意义,当饱和度S非常低时,色调H会不稳定,当明度V非常高或非常低时,饱和度S无意义。并且非彩色区域的颜色识别主要依靠饱和度和亮度这2个分量。
在HSV颜色空间中对颜色识别区域进行直方图统计[6],分别在识别区域中选取统计最多的值,作为该识别区域的H、S和V这3个代表参数。然后将其与改进的颜色量化范围做度量比较,结合色差公式来判定车身颜色。
如表1所示,改进后的HSV颜色空间量化模板给出了每个参数的最大和最小值。首先根据量化模板的参数区间判断色彩,然后利用色差公式进行距离计算,判断色彩。如果两者判断的颜色一致则确定其为最终的车身颜色;如果不一致,当利用量化模板判断颜色为非彩色区域时,确定其颜色为最终的车身颜色。否则确定色差公式判断的颜色为最终的车身颜色。

表1 改进后的HSV颜色量化模板
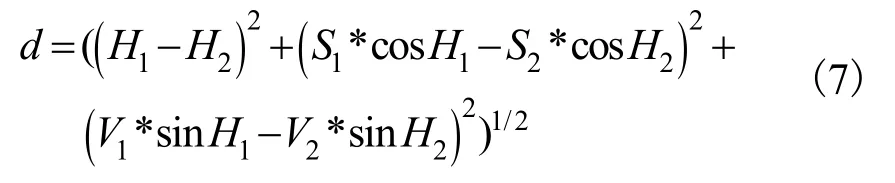
传统的色差公式为:

式中:H、S和V这3个分量是相互独立的,用传统色差公式识别效果较差。因此,把3个分量结合起来,(H,S*cosH,V*sinH),色差公式如式(7)所示。
3 实验结果分析
实验车辆图片来自停车场和小区闸口的摄像机,包括了黑色、银灰色、白色、红色、黄色、蓝色、青色、绿色、棕色9种颜色的车辆,共计400幅样本图像,选取车前脸靠近排气格栅的车盖上的一块大小和格栅大小相当的区域作为识别对象,这样可以尽可能地克服车辆反光的问题[7]。
车身颜色识别率计算公式为:

表2给出了各个颜色空间的识别结果,实验结果表明,HSV和CIELab颜色空间有较好的识别效果。基于HSV颜色空间具有计算简单等特点,选取HSV颜色空间是最合适的。

表2 不同颜色空间下识别结果%
表3给出了基于HSV颜色空间,改进的颜色量化模板和色差公式的识别结果。其中,彩色区域识别率93.25%,非彩色区域84.21%。实验结果表明,彩色区域的识别率明显高于非彩色区域。造成非彩色区域识别率低的主要原因可能是强光和外界噪声。实验结果表明,该方法可以较好的识别车身颜色,并且计算速度快,每分钟可以处理300张以上的图像,基本可以满足实时性要求。

表3 标准HSV模型和改进后的识别结果比较
4 结束语
比较了HSV、RGB、YUV和CIELab颜色空间模型,实验结果表明,HSV颜色空间的识别精度最高,但都存在外界光线变化改变车身颜色的问题。在此基础上,提出改进的HSV颜色空间色彩模板的量化和新的色差公式,有效地提高了车身颜色识别率。下一步的工作是探讨如何克服强光照射和车盖表面反光等问题,以进一步提高车身颜色识别率。
[1]赵淳生.21世纪超声电机技术展望[J].振动、测试与诊断,2000,20(1):7-12.
[2]Merler M.Car color and logo recognition[C].CSE 190A Projet in Vision and Learning,2006:46-49.
[3]李贵俊,刘正熙,游志胜,等.一种基于色差和彩色归一化的车身颜色识别算法[J].计算机应用,2004,24(9): 47-49.
[4]杨峰.基于支持向量机的车身颜色识别算法研究[D].成都:电子科技大学,2013.
[5]王琪.关于运动目标特征提取以及车辆颜色识别算法的研究[D].成都:电子科技大学,2011:31-57.
[6]黄社阳,刘智勇,阮太元.基于HSV颜色空间和SVM的车牌提取算法[J].计算机系统应用,2014,23(8): 150-154.
[7]杨丹.基于BP神经网络的汽车颜色识别[D].沈阳:沈阳工业大学,2009:7-32.
责任编校:孙 林
Car Color RecognitionAlgorithm Based on HSV Color Space
HU Zhuo-yuan,CAO Yu-dong,LI Yang
(Electronics&Information Engineering College,Liaoning University of Technology,Jinzhou 121001,China)
Car color is recognized in four different color space models and we compare their effects.In view of the outside uneven light affecting recognition,we modified color quantization range and color-determining rules in west HSV color model.The experimental results show that supposed method can improve the recognition precision.
color recognition;HSV color space;color difference distance
TP391
A
1674-3261(2017)01-0010-03
2016-01-11
国家自然科学基金项目(61502216)
胡焯源(1991-),男,江苏宜兴人,硕士生。
曹玉东(1971-),男,辽宁铁岭人,副教授,博士。
10.15916/j.issn1674-3261.2017.01.003
