GNSS接收机内部噪声水平检测方法研究
2017-07-18高知明
胡 宁, 高知明, 周 勇,4
(1.南京信息工程大学电子与信息工程学院,江苏 南京 210044;2.南京市计量监督检测院,江苏 南京 210037;3.江苏北斗卫星导航检测中心有限公司,江苏 南京 210032;4.江苏省气象传感网技术工程中心,江苏 南京 210044)
GNSS接收机内部噪声水平检测方法研究
胡 宁1,2,3, 高知明1, 周 勇1,4
(1.南京信息工程大学电子与信息工程学院,江苏 南京 210044;2.南京市计量监督检测院,江苏 南京 210037;3.江苏北斗卫星导航检测中心有限公司,江苏 南京 210032;4.江苏省气象传感网技术工程中心,江苏 南京 210044)
GNSS接收机的定位精度在进行性能评估时必须进行内部噪声水平检测必不可少。该文利用多载体导航信号模拟器仿真导航信号,作为高精度的标准信号源,在对多台GNSS接收机内部噪声水平检测时播发同一信号源,运用零基线法对GNSS接收机鉴定。通过检测实例表明,利用多载体导航信号模拟器进行接收机内部噪声水平检测合理、可信,检测速度快速有效且符合接收机内部噪声水平检测要求。
GNSS接收机;内部噪声水平;零基线法;多载体导航信号模拟器
0 引 言
GNSS泛指全球卫星导航系统,常见系统有GPS、BDS、GLONSS和GALILEO卫星导航系统,随着全球卫星导航系统的快速发展,卫星产品产业化不断加快,市场对GNSS接收机的需求也日益增大,同时对GNSS接收机的性能要求也越来越高。GNSS接收机的性能好坏直接影响着全球卫星导航系统的应用和发展,因此对GNSS接收机进行检测并做出合理的评估对全球卫星导航系统的建设和发展有着十分重要的意义[1]。内部噪声水平的好坏是评价GNSS接收机性能的重要指标,GNSS接收机内部噪声水平(receiver interior noise level)是 GNSS 接收机信号通道间的偏差,延迟锁相环、码跟踪环的偏差,以及钟差等引起的测距和测相误差的综合反映[2]。GNSS接收机的内部噪声水平检测方法有超短基线法和零基线法,这两种检测方法主要依据BD 420009——2015《北斗/全球卫星导航系统(GNSS)测量型接收机通用规范》与CH 8016——1995《全球定位系统(GPS)测量型接收机检定规程》。通常GNSS接收机内部噪声水平检测需要特定的检测场地,对于同批号待检数量较多的接收机,由于条件的限制使得接收机检测环境有所差异且效率较低。本文提出一种利用多载体导航信号模拟器进行GNSS接收机内部噪声水平检测,通过模拟器仿真多星座任意频点组合的导航信号,对同批号多台接收机检测时播发同一信号源。
1 接收机内部噪声水平检测方法
1.1 相对定位基本原理
GNSS系统的定位方法是通过测量卫星位置到接收机之间的距离,然后依据多颗卫星的观测数据解算出接收机具体位置。由于测码伪距在测量时定位精度比载波相位误差较大,而在工程测量时往往希望获得高精度的定位数据,因此采用载波相位进行测量[3]。
载波相位的原始观测方程可表示为

tA——接收机钟差;
tP——卫星钟差;
c——真空中光速;
λ——载波相位波长,λ=f/c;每个变量的上标为卫星编号,下标为接收机编号。

式(2)是在理想环境中卫星P空间位置到接收机A之间距离的观测方程,其中[XP,YP,ZP]为卫星在空间中的位置矢量,[XA,YA,ZA]为接收机在测站的待定量,为卫星到接收机间的距离。
在相对定位时,为了获得高精度的定位结果,将载波相位观测值直接相减即形成卫星间求差、接收机间求差、历元间求差3种方式[4]。在实际应用中往往考虑到卫星钟差和接收机钟差的影响,而采用接收机间求差方式,可得接收机A、B间的单差载波相位观测方程为

式(3)是接收机间单差方式,这种单差方式消除了卫星钟差的影响,同时也对卫星轨道误差、以对流层为主的中性大气延迟误差和电离层延迟误差的影响也可大大降低[5]。
为了进一步消除在定位过程中带来的各种误差,采用双差方式,在接收机间和卫星间进行二次求差,可得接收机A、B与卫星P、Q的双差载波相位观测方程为

双差载波相位观测值消除了卫星钟差和接收机钟差的影响,在A、B两个接收机之间距离较近且周围环境相似时,这种双差方式可以极大消除大气延迟误差及卫星轨道误差带来的影响,可以得到更好的定位结果。
1.2 零基线检测方法
GNSS接收机内部噪声水平检测主要运用零基线法,它主要是检测接收机钟差、信号通道时延、延迟锁相环及机内噪声等电性能对接收机定位精度影响大小一种有效方法[6]。零基线法利用接收机接收同一卫星信号进行载波相位观测值间求差,其双差差值理论上为0,因此零基线法是指多台接收机分别接收同一功率分配器输出的卫星信号且信号的功率、相位等同,随意选择两台接收机设备进行双差载波相位观测数据求差,解算出相应的基线向量,以检测仪器固有误差[7]。
零基线检测步骤:
1)选择周围高度角10°以上无障碍物的开阔地方安放天线,按图1连接功率分配器。
2)打开电源,接收机在静态测量模式下同步接收4颗以上卫星不少于30min。
3)用静态软件计算坐标增量和基线长度,其误差应小于1mm[8]。
1.3 超短基线检测方法
GNSS接收机在进行内部噪声水平检测时,在无功率分配器的条件下可采用超短基线法检测内部噪声水平,超短基线法对内部噪声水平的检测也是一种相对定位法对接收机定位精度的检测。超短基线法选择在周围高度角10°以上无障碍物的场地并无电磁波干扰及地面反射系数小。将接收机天线整平对中放置在观测墩上且同步测试。

图1 零基线检测示意图
超短基线检测步骤:
1)在标定的场地内接收机天线必须安置在观测墩北方向。
2)接收机开机接收同步卫星信号,同步卫星必须4颗以上连续接收1.5h。
3)用GNSS数据处理软件计算,解算出的基线向量值与大地测量的标准值之间差值应小于接收机固定规格。
1.4 内部噪声水平检测方法分析
GNSS接收机在进行相对定位时产生的误差主要来源于载波相位观测数据,因此载波相位观测数据质量的好坏直接影响着接收机性能的优越,是接收机的重要指标。零基线法和超短基线法依据相对定位原理采用双差载波相位方式对观测数据进行解算。
零基线法的解算依据上式(1)~式(4),它消除了电离层和对流层延迟误差、卫星轨道误差、多路径效应误差、载波相位观测噪声、天线相位中心偏差误差等,零基线检测法可以较为真实地反映接收机的质量水平,从检测方法上分析多台接收机接收的信号由同一台天线传输,因此零基线法消除了天线对观测数据的影响[9-10]。
在检测主机与天线固定在一起的GNSS接收机采用超短基线法,但此方法无法消除天线相位中心偏差误差和GNSS接收机对中误差的影响,同时在双差定位时载波观测模型的解算也残留着相关误差的残差。
2 仪器检测实例与数据分析
本次检测采用多载体导航信号模拟器,它能够根据运动载体的动态特性等各种因素对卫星信号的影响,精确模拟高动态包括GLONASS、GPS和BDS等混合星座任意频点组合的导航信号。依据我国最新发布的JJF 1471——2014《全球导航卫星系统(GNSS)信号模拟器校准规范》和BD 420012——2015《北斗/全球卫星导航系统(GNSS)信号模拟器性能要求及测试方法》对此次使用的GNS8450多载体导航信号模拟器校准,表1为多载体导航信号模拟器性能与BD 420012——2015专项标准指标对比。可以看出GNS8450多载体导航信号模拟器仿真的导航信号符合我国规定要求,因此GNS8450模拟器可以作为高精度的标准信号源,提供高稳定度的标准1PPS脉冲信号和10MHz时钟信号,并且能够满足各类多终端协同导航测试的应用需求,目前是GNSS接收设备测量首选计量仪器[11]。

表1 多载体导航信号模拟器性能与BD 420012——2015专项标准指标对比
本次采用GNS8450多载体导航信号模拟器支持 BDS(B1、B2、B3)和 GPS(L1、L2)5 个频点任意频点间随机组合信号输出,同时检测接收机采用上海司南研发的M300 Pro接收机,此型号接收机完全支持多载体导航信号模拟器仿真的5个频点,可同时跟踪14颗卫星,利用M300 Pro接收机对卫星信号进行数据采集。
本次检测采用零基线法对GNSS接收机内部噪声水平检测,将2台接收机分别接至功率分配器2个输出端口,在检测中多载体导航信号模拟器直接将卫星信号输出至功率分配器,然后通过功率分配器等功率、相位传输给接收机,如图2所示。
在多载体导航信号模拟器检测平台上,首先将多载体导航信号模拟器通过本地控制软件界面设置后,下发星历数据,确定下发完毕指示信号后,等待仿真计算机仿真命令,仿真计算机开始仿真后实时将载体运动数据通过光纤传输给模拟器,信号处理模块将产生的GNSS中频信号输入到射频板,再将模拟器射频输出的衰减信号与功率分配器对接[12]。由于本次检测是对GNSS接收机内部噪声水平检测,卫星信号质量越好使得接收机定位精度越高,更加体现接收机性能的优越,但是接收机在日常工作中往往会受到各方面的干扰,因此在对仿真环境星座参数编辑时,使用多种仿真效应模型,如:对流层模型和电离层模型。
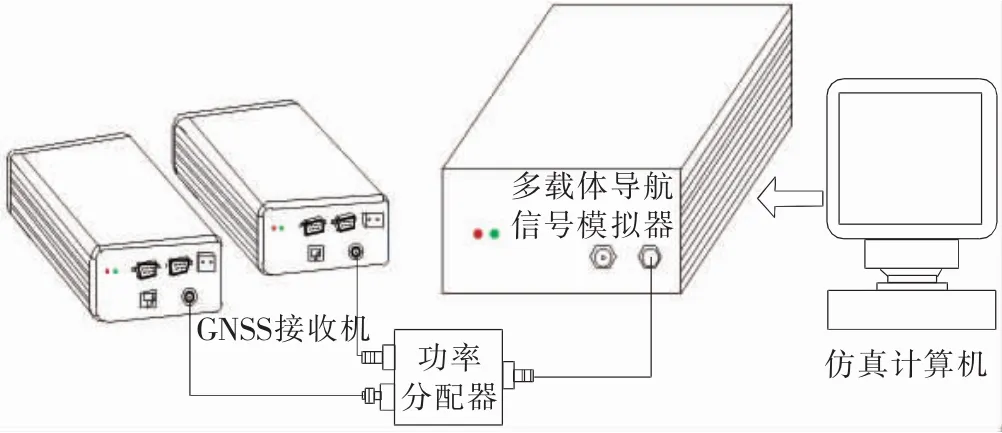
图2 接收机闭环仿真系统框图
利用多载体导航信号模拟器在对卫星信号静态观测数据的采集时,卫星天空分布图如图3所示。
运用GNSS数据处理软件对各接收机采集的卫星原始观测数据进行静态基线处理,根据BD420009——2015规定:在接收机内部进行噪声水平检测时,接收机连续采集数据时间不少于30min且观测数据静态解基线向量长度在1mm以内,则认为接收机内部噪声水平满足检测要求[13]。表2为9组接收机静态基线处理结果,在表中直观的看出利用多载体导航信号模拟器对接收机内部噪声水平检测所采集的静态解基线向量长度均小于1mm。
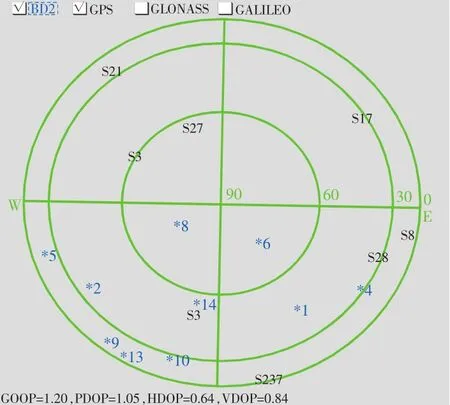
图3 观测时段卫星天空分布图

表2 9组接收机静态基线处理结果
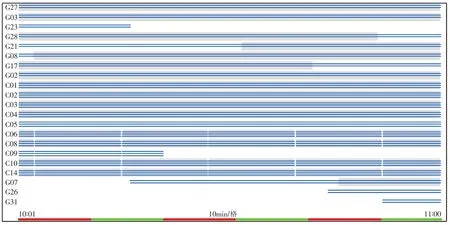
图4 第1组接收机零基线观测数据质量
图4 是第1组接收机零基线双差定位残差,图中大写字母C、G分别代表BDS和GPS(下文字母含义一致)。由图可知双差定位残差值很小,GPS卫星双差定位残差最大值为5mm,而BDS卫星双差定位残差最大值为18 mm,根据双差残差可以明显分析出GPS观测数据质量优于BDS观测数据质量。如图5所示,静态基线GPS观测数据质量较好没有出现周跳现象,BDS观测数据质量较差明显出现周跳现象。
载波相位观测值精度根据双差观测量残差分析:第1组接收机观测值精度很高,其中GPS观测值精度高于BDS观测值精度,如表3所示,GPS/BDS水平精度和垂直精度均符合标准要求。通过上述结果表明,双差观测量残差的高低直接影响着观测数据质量的好坏,对观测值精度的计算起到决定作用。接收机内部噪声影响了GPS/BDS载波相位观测数据导致双差观测量残差参差不齐,但内部噪声的影响较小,GPS/BDS频点残差变化幅度不大。
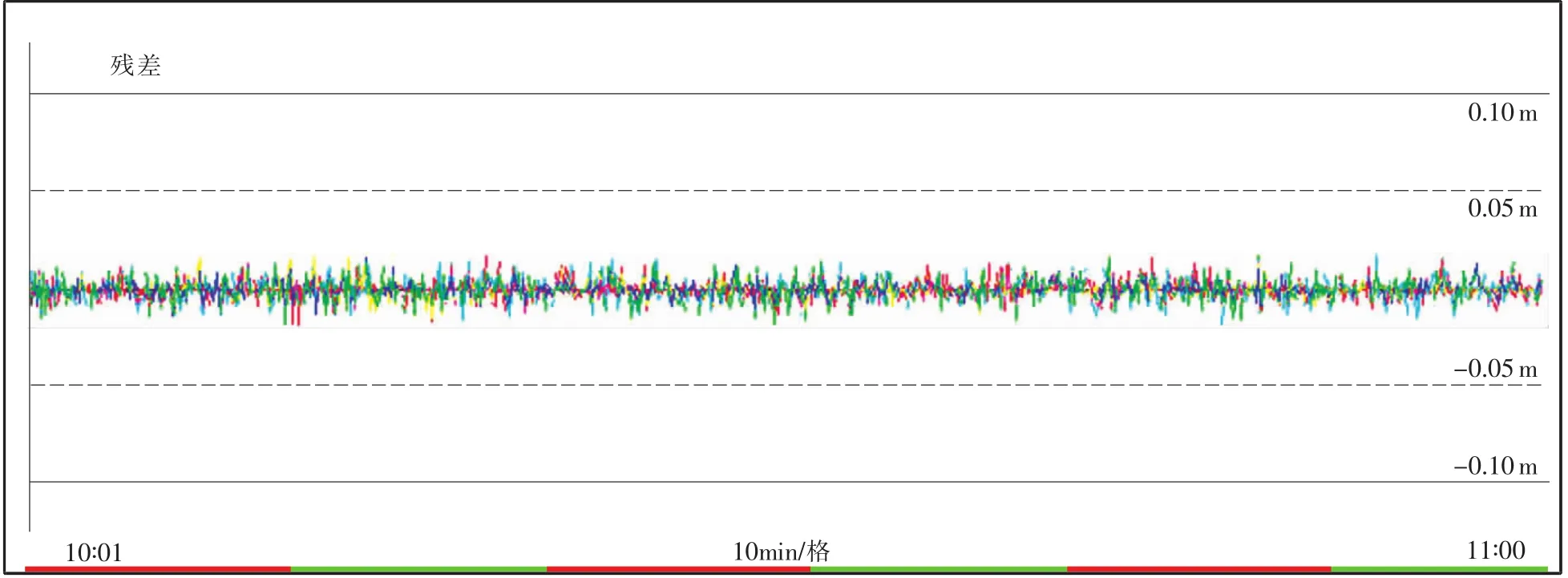
图5 第1组接收机零基线双差定位残差

表3 第1组接收机静态基线观测值精度
3 结束语
随着全球卫星导航系统的快速发展,GNSS接收机性能的检测越来越重要,它必须符合国家规定要求。内部噪声水平的检测是GNSS接收机主要的检测项目之一,本文采用多载体导航信号模拟器对接收机内部噪声水平检测,该方法可重现复杂的效应场景对同批号接收机进行检测,这在已有的检测方法中是无法实现的。通过检测实例,验证了的多载体导航信号模拟器检测方法的有效性,该方法不但科学、客观的反映了接收机内部噪声水平,而且还提高了检测效率。
[1]罗海美,刘广军,刘旭东.GNSS接收机内噪声水平检测评价方法研究[J].电子测量技术,2015,38(1):34-37.
[2]北斗/全球卫星导航系统(GNSS)测量型接收机通用规范:BD 420009-2015[S].北京:中国卫星导航系统管理办公室,2015.
[3]张锐,蔡艳辉,翟清斌.现代GNSS接收机内部噪声水平评定[J].中国计量,2010(12):97-99.
[4]高成发,赵毅,万德钧.GPS载波定位中双差观测值权的合理确定[J].测绘科学,2005,30(3):28-32.
[5]祝会忠.长距离单元非差GNSS网络RTK理论呢与方法 [M].北京:中国测绘出版社,2014:14-38.
[6]苏玉瑞,姬洪亮,王晓南.GPS接收机内部噪声水平测试方法研究[J].测绘与空间地理信息,2014,37(12):118-119.
[7]杜娟,张会,刘星,等.基于零基线的GPS/BD2兼容接收机精度检测方法研究[J].舰船电子工程,2013,33(7):121-123.
[8]全球定位系统(GPS)测量型接收机检定规程:CH 8016-1995[S].北京:国家测绘局,1995.
[9]AMIRI-SIMKOOEI A R,TIBERIUS C C J M.Assessing receiver noise using GPS short baseline time series[J].GPS Solutions,2007,11(1):21-35.
[10]LANGLEY R B.GPS receiver system noise[J].GPS World,1997,8(7):40-45.
[11]刘志国.卫星导航信号模拟器研究与实现[D].太原:中北大学,2014.
[12]寇艳红,常青,张其善.高动态GPS模拟器闭环测试系统结构与软件设计[J].北京航空航天大学学报,2004,30(6):534-538.
[13]高晓,戴吾蛟,李施佳.高精度GPS/BDS兼容接收机内部噪声检测方法研究 [J].武汉大学学报 (信息科学版),2015,40(6):759-799.
(编辑:刘杨)
Study on the internal noise level detection method of GNSS receiver
HU Ning1,2,3,GAO Zhiming1,ZHOU Yong1,4
(1.School of Electronics and Information Engineering,Nanjing University of Information Science and Technology,Nanjing 210044,China;2.Nanjing Institute of Measurement and Testing Technology,Nanjing 210037,China;3.Jiangsu Beidou Satellite Navigation Testing Center Co.,Ltd.,Nanjing 210032,China;4.Jiangsu Technology and Engineering Center of Meteorological Sensor Network,Nanjing 210044,China)
In performance evaluation,GNSS receiver positioning accuracy is essential for testing of the internal noise level.The research uses multi-carrier navigation signal as a high-precision standard signal,and broadcasts the same signal source when detecting the internal noise level of multiple GNSS receivers,then uses the zero-baseline method to identify the GNSS receivers.By testing samples,it is more reasonable and feasible to detect the receiver’s internal noise level with multi-carrier navigation simulator.Compared with the traditional method,the proposed method is faster,more effective and can satisfy the requirements of the receiver’s internal noise level.
GNSS receiver; internal noise level; zero baseline method; multi-carrier navigation signal simulator
A
1674-5124(2017)04-0028-05
10.11857/j.issn.1674-5124.2017.04.007
2016-09-12;
2016-11-03
胡 宁(1967-),男,江苏南京市人,高级工程师,硕士,主要从事卫星导航产品检测技术研究。
