基于侧倾特性的汽车自适应前照灯转角数学模型研究
2017-07-12龙腾飞
龙腾飞
(一汽-大众汽车有限公司佛山分公司,广东佛山 528225)
基于侧倾特性的汽车自适应前照灯转角数学模型研究
龙腾飞
(一汽-大众汽车有限公司佛山分公司,广东佛山 528225)
汽车在弯道行驶时会发生侧倾,导致车灯位置和光轴照射角度在水平和垂直两个方向都会发生变化,这将影响汽车车灯的照明效果和驾驶的安全性。为此,结合考虑车身侧倾的三自由度操纵模型,推导了稳态工况下车速、转弯半径和汽车侧倾角的关系,得出了侧倾角与车灯转角的关系。针对样车进行分析,结果表明:汽车侧倾对车灯照明效果的影响较大,水平方向最大值可达1.92°,垂直方向最大值可达2.25°。将此偏差值与文献[1]中提出的数学模型相结合,提高了汽车自适应前照灯弯道行驶数学模型的精度。
车身侧倾;自适应前照灯系统;动力学模型
0 引言
为了提高汽车夜间驾驶的舒适性和安全性,汽车自适应前照灯应运而生,它可以随天气、道路或车身自身行驶状态的变化而改变照明方向或光分布形式。文献[1]中根据车速和转弯半径来确定汽车在转弯行驶时的车灯转角,为汽车AFS前照灯在转弯模式下的转角数学模型建立奠定了基础,但实际上汽车转弯时车灯照明情况确还受到车身状态(侧倾)的影响。如图1所示,汽车在发生侧倾的情况下光型会有明显移动,会给迎面而来的汽车驾驶员或行人造成炫光,不仅使人体感觉不舒服,而且会因无法看清前面道路的情况而导致交通事故的发生。针对此问题,作者结合汽车系统动力学推导了稳态工况下汽车速度、转弯半径与侧倾角之间的关系,并根据侧倾角大小计算出了汽车侧倾对车灯的影响,对文献[1]中提出的转弯半径和车速与车灯转角之间的关系进行修正,提高了AFS(Adaptive Front-lighting System,自适应前照灯系统)转角数学模型的精度。
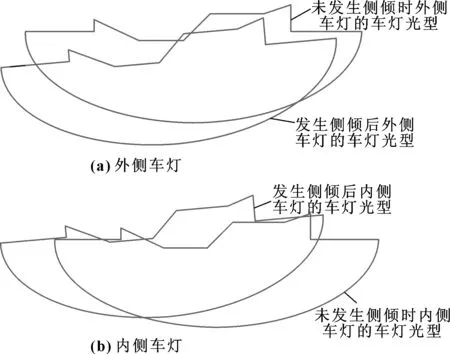
图1 侧倾状态下前照灯光型的移动
1 汽车弯道行驶时的侧倾角
由汽车系统动力学可知,前轮转角δf与稳态条件下的车身侧倾角Φr之间的关系如下[2]:
其中:a为质心至前轴的距离;b为质心至后轴的距离;hb为质心至侧倾中心线的距离;m为汽车总质量;mf为前轮非簧载质量;mr为后轮非簧载质量;mb为车身质量;Caf为前轮侧偏刚度;Car为后轮侧偏刚度;Kφ为悬架的侧倾刚度系数;ν为汽车侧向速度;r为横摆角速度;δf为前轮转角;前轮胎侧向偏移量df≈haf-hao,后轮胎侧向偏移量dr≈har-hao;haf为前轴侧倾中心高度;hao为质心对应侧倾中心高度;har为后轴侧倾中心高度。
再由转弯半径R与前轮转角δf之间的关系[2]:δf=arctan(L/R), 通过克莱姆法则可求出转弯半径R与稳态条件下的车身侧倾角Φr之间的关系。
2 车灯位移和光轴角度变化方程
2.1 侧倾时车灯的位移方程
2.1.1 车灯到侧倾中心线的距离
图2所示,设车灯到地面距离为H,设车身前后侧倾中心到地面的距离分别为haf、har,前、后轴间距为L,车灯与前轴的水平距离为L1,得:
车灯到侧倾轴线的距离:
hc=(H-N1N2)cosθ≈H-N1N2

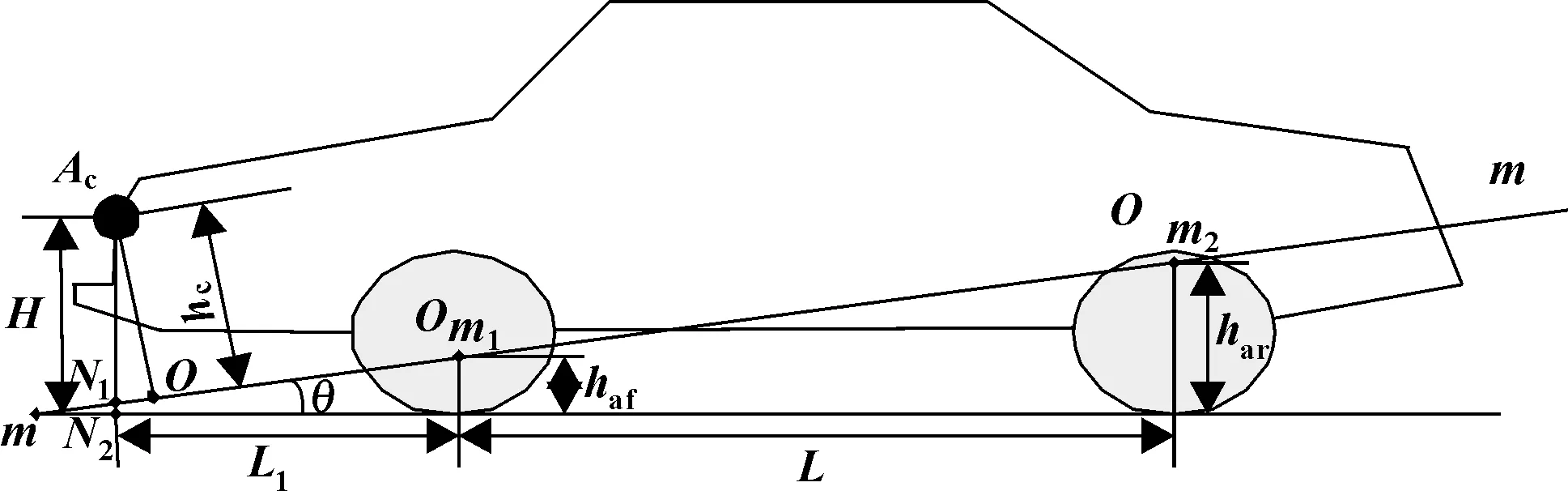
图2 前照灯与侧倾中心线的距离关系
2.1.2 车灯的位移
如图3所示,设左右车灯间距为2Lc,当车灯侧倾角为Φr时,得:θ1=arctanLc/hc-Φr,计算得:
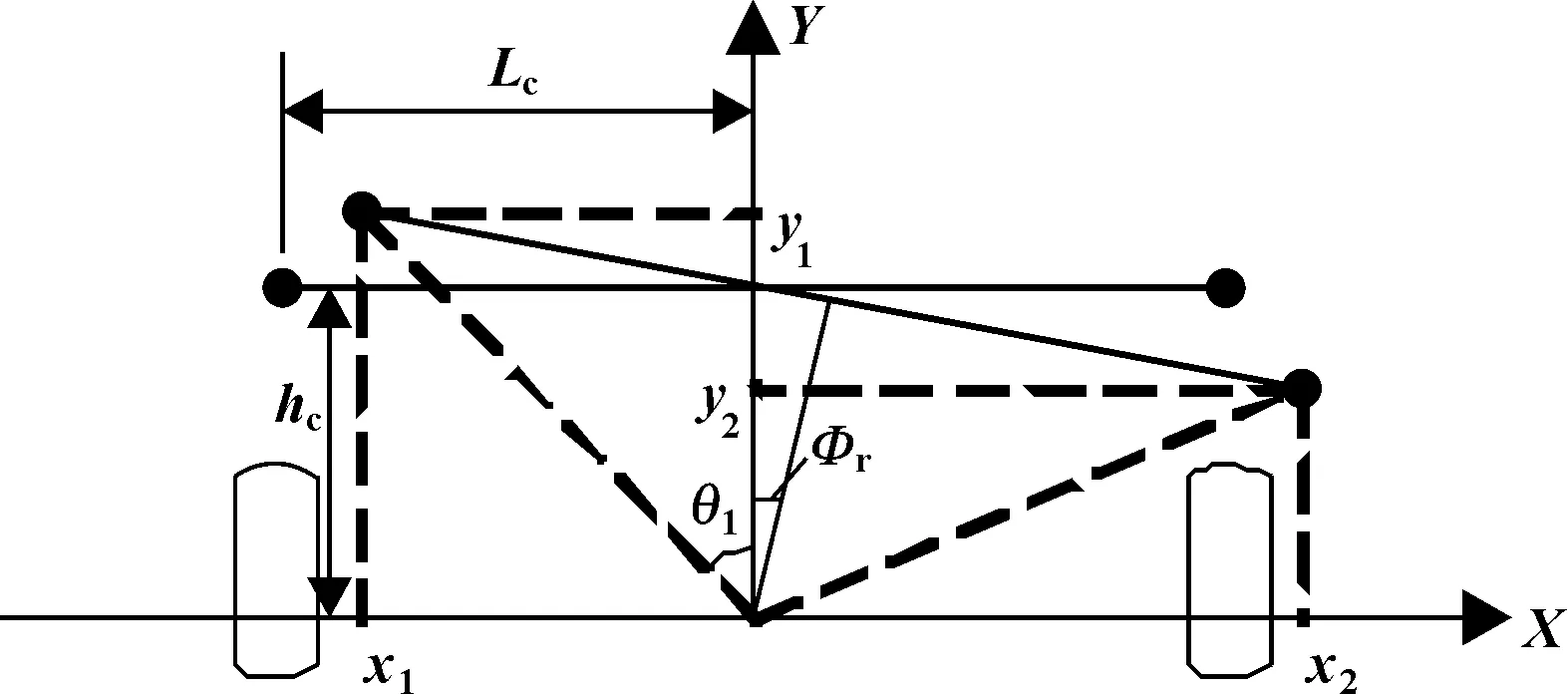
图3 侧倾时前照灯的位移
得出内侧灯X轴方向位移为:
Y轴方向位移为:
式中:θ1=arctanLc/hc-Φr。
相应外侧灯X轴方向位移为:
Y轴方向位移为:
式中:θ2=arctanLc/hc+Φr。
2.2 侧倾时车灯光轴照射角度的变化
由于侧倾轴线不与地面平行,所以汽车侧倾时不仅会使车灯发生位移,而且会造成车灯光轴角度的变化。
先考虑光轴水平方向角度的变化。如图4所示,设汽车静止时两前照车灯光轴所在平面与侧倾轴线交于点a,则aAc与两光轴始终平行,设aAc长度为L3。如图5所示,再次以O为原点,X轴平行于车轴,Y轴垂直于X轴和侧倾轴线m,建立坐标系1,其中ad为侧倾后光轴所在位置,根据三角形边角关系得:
Acd=2hcsin(Φr/2)
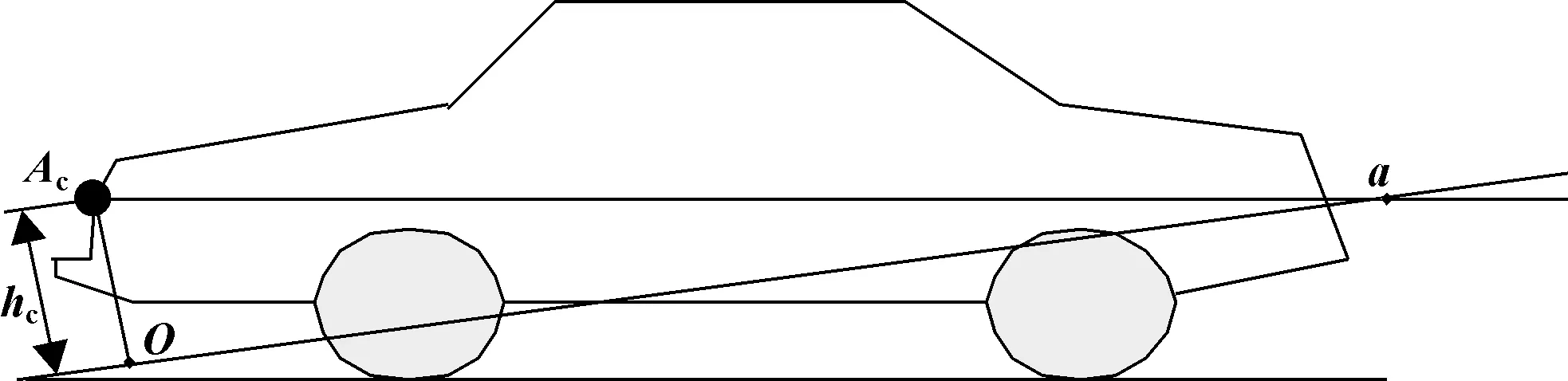
图4 侧倾时前照灯光轴与侧倾轴线位置关系

图5 车灯水平方向照射角度的变化
再考虑光轴垂直方向角度变化,如图6所示,根据三角形边角关系可得垂直方向光轴角度变化为:
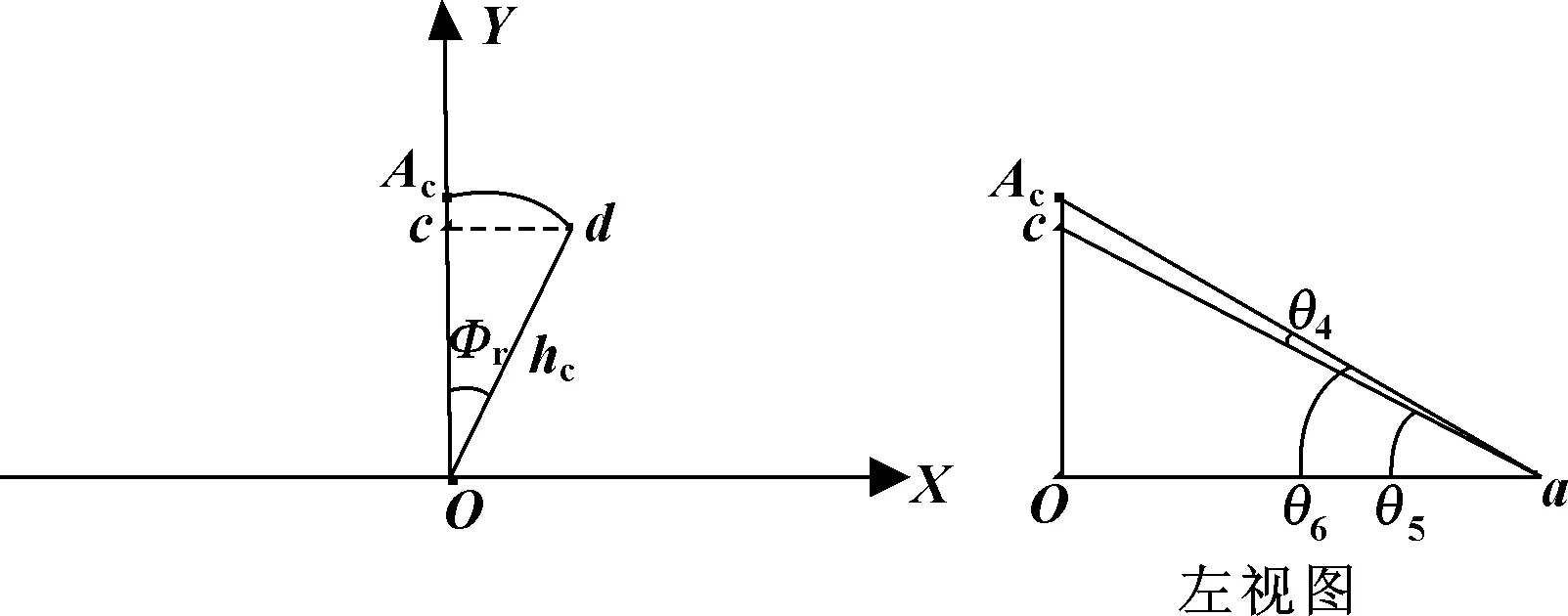
图6 前照灯垂直方向照射角度的变化
2.3 汽车侧倾对前照灯的影响
传统汽车前照灯的照射方向是固定不变的,汽车转弯过程中发生侧倾,在水平方向上会使车灯整体向弯道外侧偏移,垂直方向上使内侧车灯向上偏移、外侧车灯向下偏移。而且会对车灯在水平方向和垂直方向上的照射角度产生不同程度的影响,这一系列变化都可能会导致交通事故的发生。
2.3.1 车灯在垂直方向上应该调整的角度
为方便讨论,现取外侧车灯为研究对象,如图7所示为汽车侧倾时外侧前照灯需要在垂直方向上调整的角度,图中实线为汽车侧倾前车灯的照射方向,虚线为侧倾后车灯的照射方向,点划线为汽车侧倾时外侧车灯应该照射的方向。
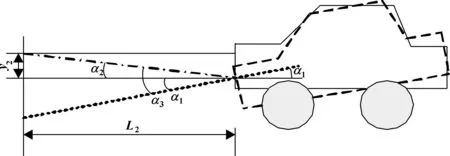
图7 汽车侧倾时前照灯在垂直方向应该调整的角度
图中L2为汽车前照灯距标准检测屏幕的距离(根据目前国内法规标准[3],取L2为25 m)。y2为汽车侧倾使汽车外侧前照灯下降的距离,α1为汽车车灯光轴垂直方向角度的变化,α2为外侧前照灯位置下降致使车灯应该调整的角度,α3为车灯在垂直方向上应该调整的角度(向上为正,向下为负)。根据三角形边角关系可得:
整理得:
2.3.2 车灯在水平方向上应该调整的角度
再考虑外侧车灯水平方向应该调整的角度,如图8所示为汽车侧倾时外侧前照灯需要在水平方向上调整的角度,图中实线为汽车侧倾前车灯的照射方向,虚线为侧倾后车灯的照射方向,点划线为汽车侧倾时外侧车灯应该照射的方向。

图8 汽车侧倾时前照灯在水平方向应该调整的角度
图中L2为汽车前照灯距标准检测屏幕的距离(据文献[3]规定,L2为25 m)。x2为汽车侧倾使汽车外侧前照灯向外移动的距离,β1为汽车车灯光轴水平方向角度的变化,β2为外侧前照灯水平移动致使车灯应该调整的角度,β3为车灯在水平方向上应该调整的角度(向外为正,向内为负)。根据三角形边角关系可得:
整理得:
由于侧倾轴线与地面夹角θ很小,所以可以近似地认为光轴相对标准检测屏幕的夹角变化等于光轴与XOY平面的夹角变化(α3和β3)。
3 样车计算与分析
将样车作为研究对象,分别取车速u为20、30、40、60、80 km/h,取转弯半径R连续变化,用MATLAB软件对α3和β3进行求解,分析汽车侧倾时对汽车前照灯所照成的影响。计算转角偏差所需样车参数如表1所示。该样车在理想路面上转弯行驶时的车速与最小转弯半径如表2所示(用于计算垂直转角极限值)。在水平方向上将计算的偏差值β3与文献[1]中计算的车灯水平转角相加可得考虑侧倾后的车灯转角曲线,如图9所示。所计算的水平偏差值β3如图10所示,垂直偏差值α3如图11所示。

表1 计算转角偏差所需样车参数

表2 理想路面上车速与最小转弯半径对应关系
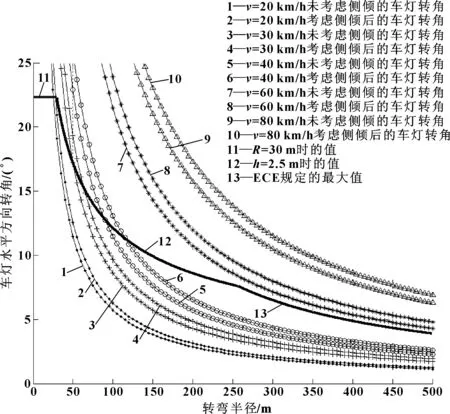
图9 考虑与未考虑侧倾时前照灯水平方向转角对比
(1)计算出水平偏差值之后再加上文献[1]中提出的3个限制条件:①转弯半径小于30 m时无须再增加转角;②弯道最小照明宽度要求;③文献[4]中规定的最大值。可得图9所示的考虑和未考虑侧倾时的水平车灯转角对比曲线,可知汽车在60 km/h和80 km/h转弯时,虽然侧倾对车灯有影响,但由于已经超过限制条件,所以可以不考虑侧倾对车灯的影响
(2)由图10可见:由于侧倾的影响,汽车在水平方向的转角偏差值在同转弯半径的条件下随着车速的增加而增加,由于文献[1]中3个条件的限制,最大偏差角在车速为20 km/h时出现,最大偏差值为1.92°。
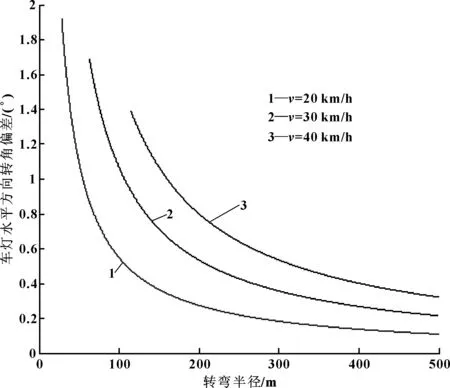
图10 不同车速和转弯半径下,考虑与未 考虑侧倾时前照灯水平转角的差值

图11 不同车速和转弯半径下,考虑与未 考虑侧倾时前照灯垂直转角的差值
(3)计算出垂直偏差值后再加上表2的限制条件可得垂直方向的转角偏差值,如图11所示。可知:在相同转弯半径的条件下,车速越大车灯垂直方向转角越大,但随着车速的增加侧向力不断减小,致使汽车在某车速下转弯时转弯半径有所限制,得出车速为20 km/h时车灯垂直转角可达最大值,约为2.25°。且转弯半径大于350 m时,汽车侧倾运动特性对车灯垂直方向影响很小,可不作考虑。
4 结论
在汽车转弯行驶时,汽车自适应前照灯转角大小不仅由车速、方向盘转角等因素决定,还受到车身自身状态的影响。作者结合考虑车身侧倾的三自由度操纵模型,推导了汽车侧倾角与车速和转弯半径之间的关系。通过几何关系推导了汽车侧倾时车灯和车灯光轴的运动规律,并建立侧倾角与车灯和光轴运动的方程。计算了汽车侧倾运动特性对车灯水平和垂直方向的影响,得出实际水平转角β=β原+β3,实际垂直转角α=α3的结论,并与文献[1]中计算的车灯转角作对比,结果显示随着车速的增加和转弯半径的减小侧倾对车灯的影响越大,水平方向最大值可达到1.92°,垂直方向最大值可达2.25°。
【1】李礼夫,邓前.汽车自适应前照灯转弯模式的数学模型研究[J].汽车技术,2010(10):43-46. LI L F,DENG Q.Research on the Mathematical Model of Bending,Mode of Vehicle Adaptive Front-lighting System[J].Automobile Technology,2010(10):43-46.
【2】喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2005:220-240.
【3】QC/T578-1999汽车及挂车牌照灯配光性能[S].
【4】ECE R48 Uniform Provisions Concerning the Approval of Vehicles with Regard to the Installation of Lighting and Light-signalling Devices[S].
Research on Mathematical Model of Bending Mode of Vehicle Adaptive Front-lighting System Based on Heeling Property
LONG Tengfei
(Foshan Branch,FAW-VOLKSWAGEN Automotive Co.,Ltd., Foshan Guangdong 528225,China)
When the vehicle is driven on curve roads, it will tends to rollover ,which will result in the change of the car lights’ position and the optical axis illuminate angle both in vertical and horizontal directions, this will affect the illumination effect and the driving safety. Therefore, with the three-degree-of-freedom vehicle’s control model in which automobile body’s side lurch was considered .Not only the relationships between the car speed,vehicle’s turning radius and the vehicle’s body roll angle under the condition of the steady state were deduced, but also the relationship between the vehicle’s body roll angle and swivel angle of car lights was gotten. The results show that automobile body’s side lurch will make a greater influence to the illumination effect,the horizontal direction’s maximum angle can be up to 1.92°, and the vertical direction’s can be up to 2.25°. With the combination of deviation and the mathematics models put forward in reference[1],the accuracy of the corner model of adaptive headlights mathematics models is improved.
Automobile body’s side lurch; Adaptive front-lighting system; Vehicle system model
2017-02-09
龙腾飞,男,硕士,从事汽车零部件的制造与管理工作。E-mail:tengfei.long@faw-vw.com。
10.19466/j.cnki.1674-1986.2017.03.001
U463.65+1
A
1674-1986(2017)03-001-05
