CCPAZP-FFT捕获方法中频率估计算法研究
2017-07-07唐振刚徐云东李晓敏谢宝蓉
唐振刚,徐云东,李晓敏,王 瑞,谢宝蓉
(1.上海卫星工程研究所,上海 201109; 2.上海电子技术研究所,上海 201109; 3.北京理工大学 信息与电子学院,北京 100081)
CCPAZP-FFT捕获方法中频率估计算法研究
唐振刚1,徐云东1,李晓敏2,王 瑞3,谢宝蓉2
(1.上海卫星工程研究所,上海 201109; 2.上海电子技术研究所,上海 201109; 3.北京理工大学 信息与电子学院,北京 100081)
针对航天测控系统中因飞行器高速运动造成的直扩信号多普勒频率捕获精度下降问题,对CCPAZP-FFT捕获方法中的频率估计算法进行了研究。结合M-Rife频率估计方法,通过频谱搬移将原始信号真实频率移动至量化频率中心,对获得的频谱的最大值与次大值进行插值,同时对捕获峰值的相邻相位维进行多普勒修正,提高多普勒频率的捕获精度。给出了算法的步骤,以及基于K7芯片的现场可编程逻辑阵列(FPGA)的实现流程。理论分析和仿真结果验证了算法的有效性,在接收信号载噪比38 dB、多普勒动态-70~70 kHz的环境中,多普勒捕获偏差由250 Hz降至约10 Hz,实测结果验证了算法的可行性。
测控系统; 高动态; 直扩信号; 捕获; 多普勒精度; 频率估计; 相位修正; CCPAZP-FFT算法; M-Rife算法
0 引言
随着航天技术的进展,航天测控向深空探测及更高频段测控发展[1]。由于飞行器与地面测控站相距甚远,径向飞行速度快且加速度大,使测控信号具备了高动态特性。高动态环境中,直扩信号的伪码、数据位也随运动造成相位的动态变化,这样在与本地再生信号相关的过程中,将增大相关误差,降低多普勒、伪码的估计精度。针对该问题,可通过缩小频域搜索间隔但增加捕获时间解决[2]。文献[3]在缩小搜索步进的基础上对校正进行了研究以缩小捕获时间;文献[4]通过补零增加快速傅里叶变换(FFT)处理点数以减小搜索间隔。这些方法大多增加了相干运算资源或时间,一定程度减弱了多普勒频率对伪码相位的搜索的影响。通过提高多普勒频率的估计精度,进而可改善伪码相位的捕获精度。目前,在针对频率估计提出的算法中,基于频域插值的频率估计算法因实现结构简单且运算复杂度低,在工程中应用广泛。基于频域插值的频率估计法主要包括Rife算法、Quinn算法、M-Rife算法等,其中M-Rife算法的估计精度较高[5-7]。
在高动态环境中,为减弱相关时间内伪码走动导致的相关性能下降的影响,常用的捕获方法是将时间维或频率维并行,如常用的多普勒串行伪码并行捕获算法是基于FFT的伪码并行相关捕获,常用的多普勒并行伪码串行捕获算法是PMF-FFT算法[8-9]。CCPAZP-FFT捕获方法则将时、频二维同时并行,算法基于分段补零循环相关,通过分段补零的方法并结合FFT循环相关运算,将超长序列的相关运算转换为一系列子序列的线性运算,并通过FFT鉴频将二维搜索过程转化为一维的并行搜索,显著缩短了捕获时间。CCPAZP-FFT算法的多普勒捕获精度受限于选取的相关时间长度,但在高动态环境中延长相关处理时间不仅会降低相关性能,而且会增大捕获时间。针对此问题,基于大动态应用背景,由二维并行的CCPAZP-FFT捕获方法,结合M-Rife算法,利用CCPAZP-FFT独特的伪码相位维信息,本文对CCPAZP-FFT捕获方法中的频率估计算法进行了研究,以实现高动态环境中的多普勒精确估计,另外对算法性能进行了Matlab仿真验证以及FPGA实测分析。
1 算法原理
对一个单载波信号作FFT变换,根据频域出现的峰值位置k可推算出信号的频率f0=k×fs/N。此处:fs为采样频率;N为采样点数。因对时域信号采样后的取点处理会造成频谱泄露,同时FFT频率分辨率有限,故当目标信号的多普勒频率不是频率分辨率的整数倍时,会出现信号经FFT处理后的峰值位于频域两采样点间,造成较大的频率估计误差。对此问题,提出了提高检测精度的频率估计算法。其中:M-Rife算法是基于Rife算法的改进算法,通过对信号的预处理,可避免出现信号实际多普勒靠近离散频点时出现插值方向错误的问题。
M-Rife算法的实现方式为:先取峰值位置处的频域点坐标k0,令k0对应幅值为|X(k0)|,同时选取峰值两侧谱线幅值|X(k0-1)|,|X(k0+1)|中的最大值|X(k1)|作为频域次峰值(k1为|X(k1)|对应位置的频域坐标),根据主次峰值的比值关系可得信号实际多普勒与频率估计值间的差值
(1)

(2)
(3)

(4)
处理。再对x′(n)信号重新进行频率估计,将新估得的多普勒叠加上频移处理的多普勒,从而获得准确的多普勒值。
M-Rife算法通过频移处理,避免信号落入偏差较大的区域,运算量增加相对Rife算法并不多,但能较好地解决Rife算法插值方向错误的问题,算法估计出的多普勒可信度高,因此本文将其作为频率估计的基本算法。
本文的CCPAZP-FFT捕获方法中的频率估计算法原理如图1所示[7]。算法的处理步骤如下。
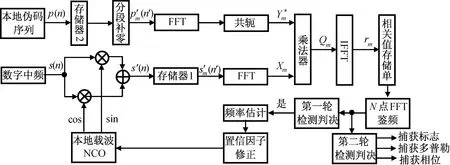
图1 CCPAZP-FFT捕获算法原理Fig.1 Principle of CCPAZP-FFT algorithm
a)接收机接收数字中频信号s(n),本地载波NCO先根据粗搜多普勒步进对信号进行下变频处理,得到复数形式的信号s′(n),将接收信号采样存入存储器1。与此同时,对本地伪码进行采样并存入存储器2。

(5)
式中:
此处:A为接收信号s(n)的幅值;τ为接收序列与本地伪码序列的相位差;fd为目标信号多普勒;
合并M组相关结果向量rm,得到一个X×M维矩阵,表示搜索完X个相位差的相关结果存储结果。其中:矩阵的每列是长为2X的本地码序列和接收码序列作FFT-IFFT前X项的相关结果;矩阵的每行对应同一相位差的相关结果。
d)将相关处理后的矩阵按行送入FFT频差搜索单元,对同一搜索相位差的存储单元中的M个相关值进行FFT运算,并对FFT结果取模,得到FFT鉴频输出第k点输出归一化频率响应
GPMF-FFT(k,fd)=
(6)
式中:
e)为提高信号的检测能量,重复步骤a)~b)P次,将每次鉴频得到的相关模值进行累加,得到P次非相参累加结果,至此完成X个相位差的搜索。
f)重复步骤a)~e)M次,完成整个伪码不确定区间的区间搜索,即完成M×X个本地伪码与接收信号的相位差的相关运算。
g)对所有相位的非相参累积结果进行选大,取出最大值所在相位维的所有结果,即对应矩阵的某一行,根据该相位差的FFT鉴频结果计算检测判决量,若满足判决条件,则取出矩阵中该相位差前后各一行的相关结果进行频率估计的运算。

(7)
式中:ki为某一相位维鉴频结果对应的峰值坐标;δi为实际多普勒频率与鉴频多普勒频率间的误差量;i=1,2,3。
i)引入不同相位差频率估计结果的权重因子αi,按不同的权重因子对不同相位差的多普勒估值进行加权,得到修正的最终估计多普勒
(8)
式中:fNCO为当前搜索的载波NCO的频率。
j)将获得的捕获伪码相位和多普勒频率置入本地搜索单元,对信号进行第二轮捕获,输出捕获结果。至此,完成高动态时提高捕获多普勒精度处理。
2 算法的FPGA实现
算法的FPGA实现主要由CCPAZP-FFT捕获模块、M-Rife频率估计及校正模块,以及逻辑控制模块组成,处理流程如图2所示。
CCPAZP-FFT捕获模块首先将经60 MHz系统时钟采用后的1 ms中频正交数据内插为32 768点,考虑FFT鉴频范围和相关损失等性能,取部分相关点数为512点,FFT鉴频点数为64点。将本地伪码补零至1 024点,用FFT-IFFT运算实现512点的圆周相关运算,并将64段512点的相关结果存入ROM,再通过控制读ROM的地址读出同一相位的64点相关结果并输入FFT鉴频模块,存储鉴频结果,由此完成512点的相位不确定区间的捕获搜索。顺序取下一段1 ms数据进行内插、部分相关、FFT鉴频和结果存储处理,直至完成所有相位不确定区间的搜索,对存储的FFT鉴频结果进行选大处理。若当前未检测到Flow1_control,Flow2_control,则将第一轮捕获标志Acq_flow1_flag,峰值所在位置对应的相位维鉴频结果以及相邻相位维的鉴频结果FFT_freq_data输出至M-Rife频率估计与校正模块;若检测到Flow1_control,同样将Acq_flow1_flag,FFT_freq_data输出至M-Rife频率估计与校正模块;若检测到Flow2_control,则将峰值对应的相位结果Acqcodephase、捕获多普勒Acqdoppler,以及捕获标志AcqFlag输出至顶层,转入跟踪处理单元。

逻辑控制模块检测到Controlstart_en后需要对M-Rife频率估计与校正模块的最终估计频率doppler_estimate进行判决。若满足式(3),则逻辑控制模块输出Flow1_control至CCPAZP-FFT捕获模块在doppler_estimate频点处进行第二轮捕获;否则,逻辑控制模块输出Flow2_control控制CCPAZP-FFT捕获模块对输入信号以delta_k进行频域移位处理,重新进行一轮捕获及频率估计处理。
基于Xilinx公司的K7 XC7K480T FPGA芯片,分别对本文的捕获算法和无频率估计的CCPAZP-FFT算法进行实现,两种算法占用资源见表1。在算法的FPGA设计和实现过程中,根据自上而下的原则进行算法模块划分、兼顾实现资源与效率,算法实现平衡了频率捕获精度和消耗资源及复杂度间的矛盾。本文的CCPAZP-FFT捕获方法中的频率估计算法相对无频率估计的CCPAZP-FFT算法只增加了约4%的Slice资源。

表1 FPGA资源占用

图2 算法FPGA处理流程Fig.2 FPGA process flowchart of algorithm
3 仿真及实测验证
3.1 仿真验证
在接收信号载噪比38 dB,多普勒动态范围-70~70 kHz的环境中,设仿真参数:伪码为Gold码,速率10.23 MHz,码长10 230;相干积分时间1 ms;射频频率2 GHz;采样频率60 MHz,对算法性能进行仿真验证,比较无多普勒估计与采用M-Rife的CCPAZP-FFT算法的捕获多普勒偏差。为减少噪声影响,对每个频点的100次捕获多普勒结果进行均方根运算统计误差,仿真结果如图3所示。

图3 有无频率估计时捕获多普勒偏差Fig.3 Doppler frequency difference with frequency estimation or not
根据仿真参数设置可知:CCPAZP-FFT鉴频的频率分辨率500 Hz,当目标多普勒在50.0~50.5 kHz范围内变化时,捕获的频点为50.0 kHz或50.5 kHz,因此在不对捕获结果进行频率估计时,最大捕获频率偏差为250 Hz;在捕获中采用M-Rife估计后,捕获多普勒偏差基本不随目标频点而变,且误差范围远小于250 Hz。引入相邻相位维修正和无修正的捕获多普勒误差结果如图4所示。由图4可知:将峰值相邻相位维的多普勒估计结果与峰值对应的估计结果进行不同权重累加后,可一定程度提高多普勒捕获的精度,减小相位不对齐时的频率估计误差。

图4 有无引入相位修正时捕获多普勒偏差Fig.4 Doppler frequency difference with phase correction or not
3.2 实测验证
在不同载噪比下对基于FPGA实现的算法进行捕获性能测试。由于算法鉴频的频率分辨率为500 Hz,为验证M-Rife频率估计算法对捕获多普勒精度的改善作用,将目标多普勒设置在两量化频率的中间位置,则实测时设置的信号源多普勒为50.25 kHz,且在每个目标频点均进行100次测试。载噪比由35 dBHz下降至31 dBHz,目标多普勒为50.25 kHz时改进算法和常规算法的捕获概率、捕获多普勒均方根误差见表2。
由表2可知:在低载噪比环境中,改进算法的捕获概率高于常规算法,且随载噪比的降低,改进算法的频率捕获误差变化缓慢,远小于常规算法的捕获多普勒误差250 Hz。实测结果与Matlab仿真结果一致,表明算法可行。
4 结束语
本文对高动态环境中因捕获时间增长,捕获相关性能减弱等因素导致的捕获多普勒精度下降问题进行了研究。选取时、频二维并行捕获的CCPAZP-FFT算法作为捕获算法,研究了CCPAZP-FFT捕获方法中的频率估计算法,算法通过对鉴频结果进行M-Rife估计,引入相位维信息对估计多普勒进行修正,得到精度较高的频率估值,并根据修正后的结果进行二次捕获,提高捕获多普勒精度。本文阐述了算法的设计思路、算法流程,分析了算法性能,并对算法性能进行仿真验证。理论分析、仿真结果和实测结果均表明:在占用资源基本不变的前提下,算法相对常规CCPAZP-FFT捕获算法,提高了捕获多普勒精度。后续可研究算法对复杂环境的适应能力,如单音干扰、异址干扰及多径干扰等环境。

表2 改进算法与常规算法实测性能
[1] 张碧雄, 巨兰. 2030年前航天测控技术发展研究[J]. 飞行器测控学报, 2010, 29(5): 11-15.
[2] 杨小江, 毛峡, 王鹏飞. 基于FPGA的高动态GPS信号FFT快捕设计与实现[J]. 西安电子科技大学学报, 2007, 34(6): 170-172.
[3] 张兆维, 李文刚, 周彦果, 等. 高动态接收机的多普勒频偏捕获新算法[J]. 西安电子科技大学学报, 2015, 42(2): 7-12+51.
[4] 段瑞枫, 刘荣科, 周游, 等. 一种低复杂度的极低信噪比高动态信号载波粗捕获算法[J]. 航空学报,
2013, 34(3): 662-669.
[5] IGLESIAS V, GRAJAL J, SANCHEZ M, et al. Implementation of a real-time spectrum analyzer on FPGA platforms[J]. IEEE Transactions on Instrumentation & Measurement, 2015, 64(2): 338-355.
[6] SO H C, CHAN F K W. A generalized weighted linear predictor frequency estimation approach for a complex sinusoid[J]. IEEE Transactions on Signal Processing, 2006, 54(4): 1304-1315.
[7] BORKOWSKI J, KANIA D. Interpolated-DFT-based fast and accurate amplitude and phase estimation for the control of power[J]. Metrology and Measurement Systems, 2016, 23(1): 13-26.
[8] Van NEE D J R, COENEN A J R M. New fast GPS code-acquisition technique using FFT[J]. Electronics Letters, 1991, 27(2): 158-160.
[9] CHENG J, ZHU W, LI G. A fast non-data aided PN code acquisition method based on FFT[C]// International Symposium on Communications and Information Technologies. Bangkok, [s. n.], 2006: 395-398.
Research of Frequency Estimation Algorithm in CCPAZP-FFT Acquisition Technology
TANG Zhen-gang1, XU Yun-dong1, LI Xiao-min2, WANG Rui3, XIE Bao-rong2
(1. Shanghai Institute of Satellite Engineering, Shanghai 201109, China; 2. Shanghai Aerospace Electronic Technology Institute, Shanghai 201109, China; 3. School of Information and Electronics,Beijing Institute of Technology, Beijing 100081, China)
Aiming at acquisition Doppler precision declining problem of DSSS signal in TT & C system caused by high speed motion of spacecraft, a frequency estimation algorithm in CCPAZP-FFT acquisition was studied in this paper. The original true frequency was shifted to the quantify center frequency by M-Rife frequency estimation algorithm. The spectrum was obtained as the maximum value and high values were interpolated. Meanwhile, the adjacent phase dimension of the peak was modified by Doppler, which improved Doppler frequency acquisition accuracy. The algorithm principle and the flowchart realized by K7 FPGA chip were given out. Theoretical analysis and simulation results verified the effectiveness of the proposed algorithm. Under the environment of the received signal carrier noise ratio 38 dB and Doppler dynamic -70 ~ +70 kHz, the acquisition deviation from 250 Hz was reduced to about 10 Hz. The experimental results also verified the feasibility of the algorithm.
TT&C system; high dynamic; DSSS signal; acquisition; Doppler accuracy; frequency estimation; phase correction; CCPAZP-FFT algorithm; M-Rife algorithm
1006-1630(2017)03-0102-06
2016-08-14;
2016-10-16
国家自然科学基金资助(616505110)
唐振刚(1980—),男,高级工程师,主要从事卫星总体研制。
TN92
A
10.19328/j.cnki.1006-1630.2017.03.014
