空间双臂机器人运动学及动力学分析与建模研究
2017-07-07吴长征刘殿富韦宝琛
吴长征,刘殿富,岳 义,3,韦宝琛
(1.上海交通大学 机械系统与振动国家重点实验室,上海 200240; 2.上海宇航系统工程研究所,上海 201109; 3.上海航天设备制造总厂,上海 200245)
空间双臂机器人运动学及动力学分析与建模研究
吴长征1,刘殿富2,岳 义1,3,韦宝琛1
(1.上海交通大学 机械系统与振动国家重点实验室,上海 200240; 2.上海宇航系统工程研究所,上海 201109; 3.上海航天设备制造总厂,上海 200245)
针对空间双臂机器人运动学和动力学建模,对失重状态下空间机器人的运动学分析与建模进行了研究。给出了双臂机器人左右臂的DH坐标及参数,建立了正运动学的计算公式,基于臂形角的方法,给出了更高效的空间机器人冗余单臂的解析形式逆解求解方法。分析了空间双臂机器人全部工作状态,引入二元判定系数归纳得到了双臂独立运动、双臂协同操作、闭链本体漂浮、开链本体漂浮4种四种机器人工作状态,并基于拉格朗日方程得到了4种不同工作状态下的动力学模型。通过对空间双臂机器人运动学及动力学进行分析与建模,为空间双臂机器人的设计与研究提供理论基础。
空间双臂机器人; 冗余; 解析形式; 逆运动学; 动力学; 失重; 建模; 判定系数
0 引言
空间机器人在在轨维护(如失效卫星捕捉、故障卫星修复),代替航天员在危险复杂的太空环境中进行舱外作业、完成空间科学实验,以及空间站的建设与维护等方面发挥了重要作用[1-2]。双臂机器人的协作性能优良。但同时协作性能使其运动学及动力学具更强的耦合性和非线性。强耦合性和非线性导致其运动学及动力学模型更复杂。空间机器人的构型从最早期的单臂机器人Canadarm逐步发展到Dextre,Robonaut2等双臂机器人,从而提高协作性能[3-5]。7自由度冗余机械臂因其避障、避关节极限、避关节奇异、最小化关节力矩、改善机械臂可操作度等的优势,成为双臂机器人臂型中最常用的类型[6-10]。
运动学逆解是运动学分析的重要内容,也是运动规划及控制的基础。针对冗余机械臂的运动学逆解解法进行了大量研究,但多是基于伪逆的方法,如加权雅可比、阻尼最小二乘法、梯度下降法等[7,11-12]。这些方法均是数值解法,且部分还加入了优化指标。基于伪逆的解法能针对不同的操作任务或操作指标进行优化,但求解效率及速度较低。文献[13]提出了臂形角解法,引入臂形角约束获得解析形式的逆解。解析型的解法则能极快得到解,但使机械臂失去了很多特性,如灵活性等。空间机器人工作时处于失重状态,对机器人的动力学控制则需重新建立在失重环境中的动力学方程。建立动力学模型方法有拉格朗日方程、牛顿欧拉法、凯恩方程等[14]。拉格朗日法,只从能量的角度出发,通过对广义坐标求导得到系统的广义力;牛顿欧拉法通过分析每根杆件的受力情况建立迭代形式的动力学方程,易于计算机实现。上述方法,同样适于空间机器人的动力学建模。针对特定自由漂浮状态下的无根空间机器人系统,有虚拟机械臂、虚拟地面法、动力学等效法等[15]。本文针对基于伪逆的求解方法效率不高的问题,结合臂形角给出了空间双臂机器人逆运动学解析形式求解方法,引入二元判定系数,将机器人的工作状态归纳表示为4种不同工作状态,针对4种工作状态,基于拉格朗日方程建立对应强耦合、非线性工作的空间双臂机器人动力学模型,为空间双臂机器人的设计与研究提供理论基础。
1 空间双臂机器人结构及参数
1.1 双臂机器人虚拟样机及组成结构
本文结合我国空间站的建造及维护规划,研究了一种空间双臂机器人。该机器人由1个工具箱本体和2个DLR型7自由度单臂构成。工具箱用于存储不同操作任务下的机器人末端工具,同时该工具箱基座通过双臂的配合能运动到不同的工位进行定位。该机器人能用于空间站的建造及维护,也可代替航天员进行危险的舱外作业,以及配合科学家完成空间科学实验。空间双臂机器人的虚拟样机如图1所示。

图1 空间双臂机器人虚拟样机Fig.1 Virtual prototyping of dual-arm space robot
1.2 空间双臂机器人DH参数
为便于分析双臂机器人的运动学,根据DH坐标系的建立方法,建立空间双臂机器人的各坐标系如图2所示[16]。图2中:∑i为右臂坐标系i;∑i′为左臂坐标系i′;∑b为基坐标系。
由图2可知:双臂机器人左右单臂的DH参数相同,参数见表1。表1中:ai为∑i-1与∑i的原点间沿xi轴距离;αi为zi-1轴与zi轴绕xi轴间的夹角;θi为xi-1轴与xi轴绕zi-1轴间的夹角;di为∑i-1与∑i的原点间沿zi-1轴距离。
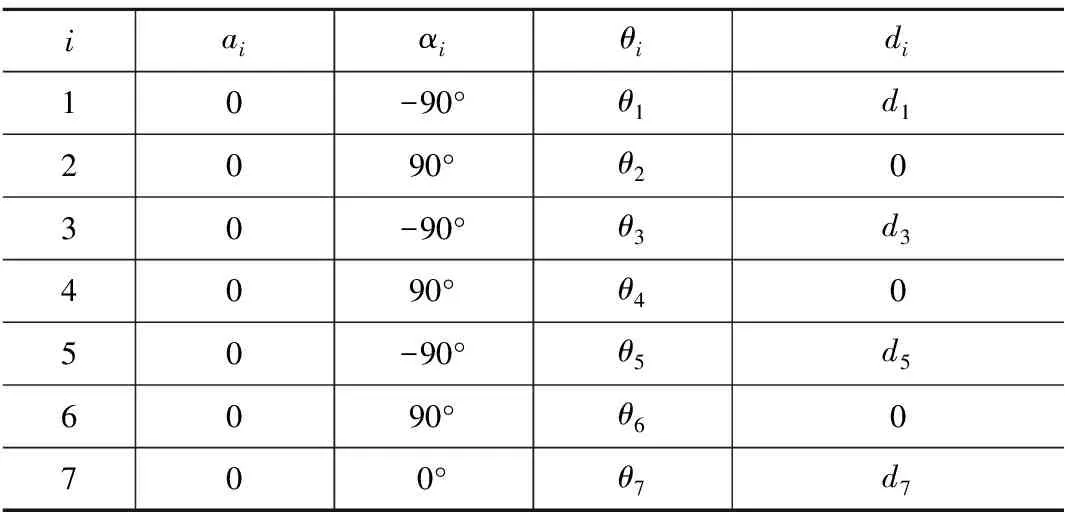
表1 双臂机器人DH参数
2 空间双臂机器人运动学
2.1 空间双臂机器人正运动学
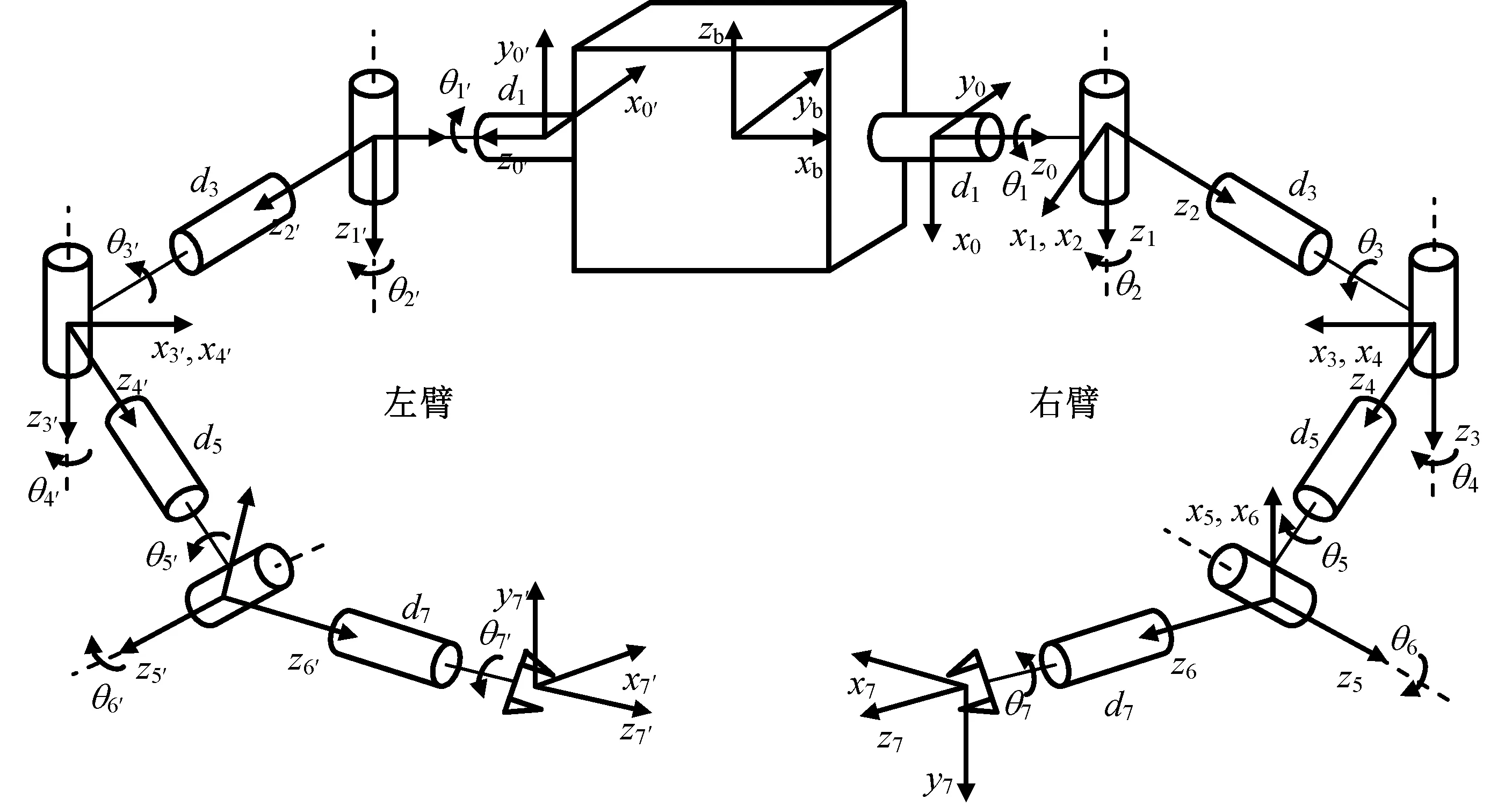
图2 双臂机器人DH坐标系Fig.2 DH coordinates of dual-arm space robot

rot(Xi,αi)·tran(ai,0,0)=
(1)
式中:rot(Zi-1,θi)为绕Zi-1轴旋转θi;tran(0,0,di)为沿Zi-1轴移动距离di;rot(Xi,αi)为绕Xi轴旋转αi;tran(ai,0,0)为绕Xi轴移动距离ai。由上述定义,可得相邻两坐标系齐次变换关系为
[Xi-1Yi-1Zi-11]T
(2)
则0标系至7系的转换关系可表示为
(3)
[X0Y0Z01]
(4)

2.2 冗余机械臂逆解解法
2.2.1 臂形角定义
在笛卡尔空间中表征一个物体的位姿需要参数6个,而上述机械臂有7个输入的冗余机械臂。单臂的前三个关节、后三个关节相互正交,如图3所示,该机械臂单臂可等效为S-R-S构型,分别构成肩关节、肘关节和腕关节。因具冗余特性,对末端同一位姿,机械臂有无穷多组输入组合能满足,亦即机械臂存在自运动。
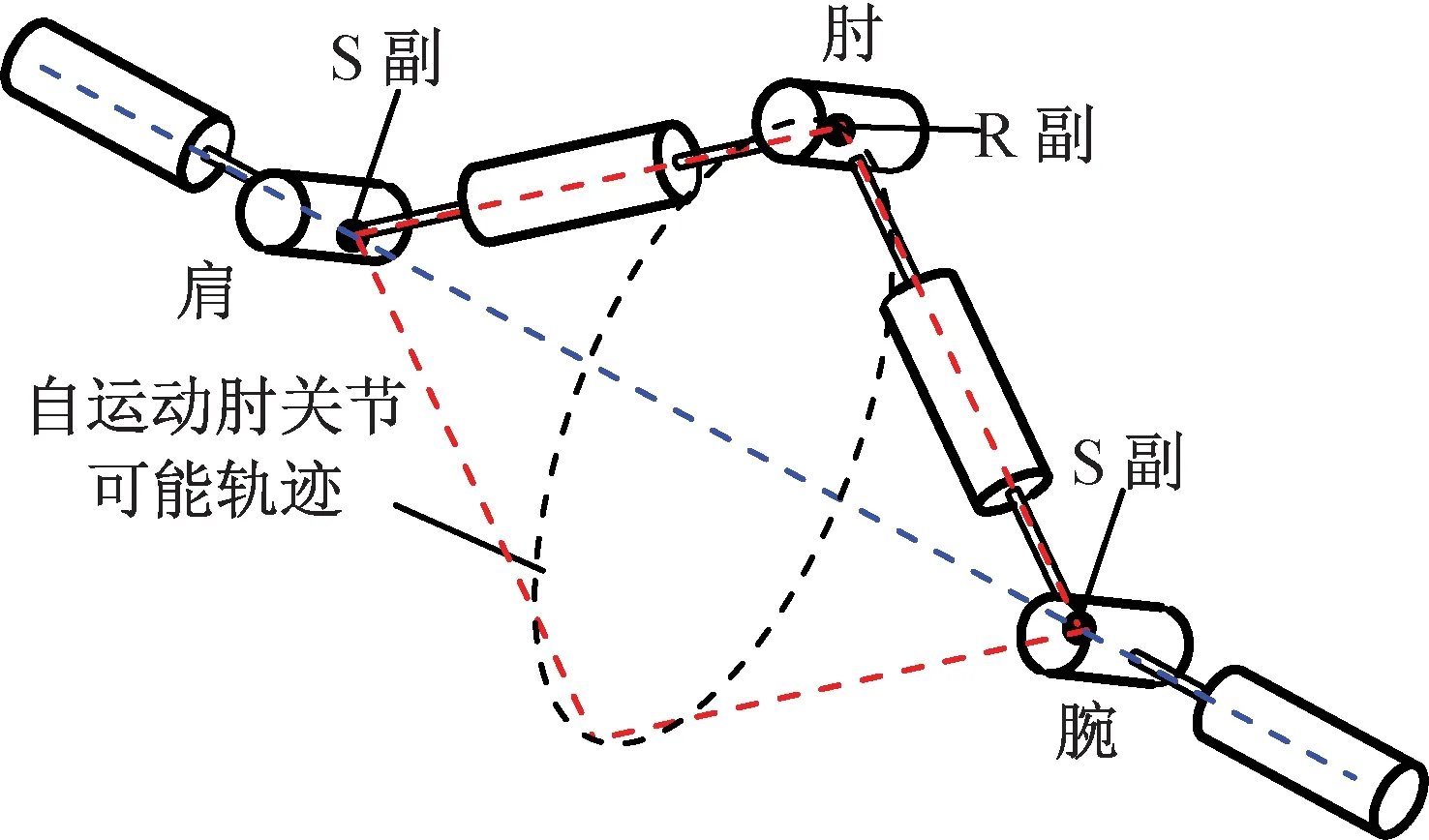
图3 机械臂等效S-R-S构型Fig.3 Equivalent configuration S-R-S of manipulator
为得到唯一的机械臂逆解,引入臂形角约束[13]。机械臂臂形角定义如图4所示。图4中:肩部三关节轴线相交于点S;腕部三关节相交于点W;点E为第四关节坐标系的原点;v为第一关节的轴线矢量。S,E,W三点构成臂型面,v与SW构成参考平面,ψ为臂型面与参考面间的夹角。
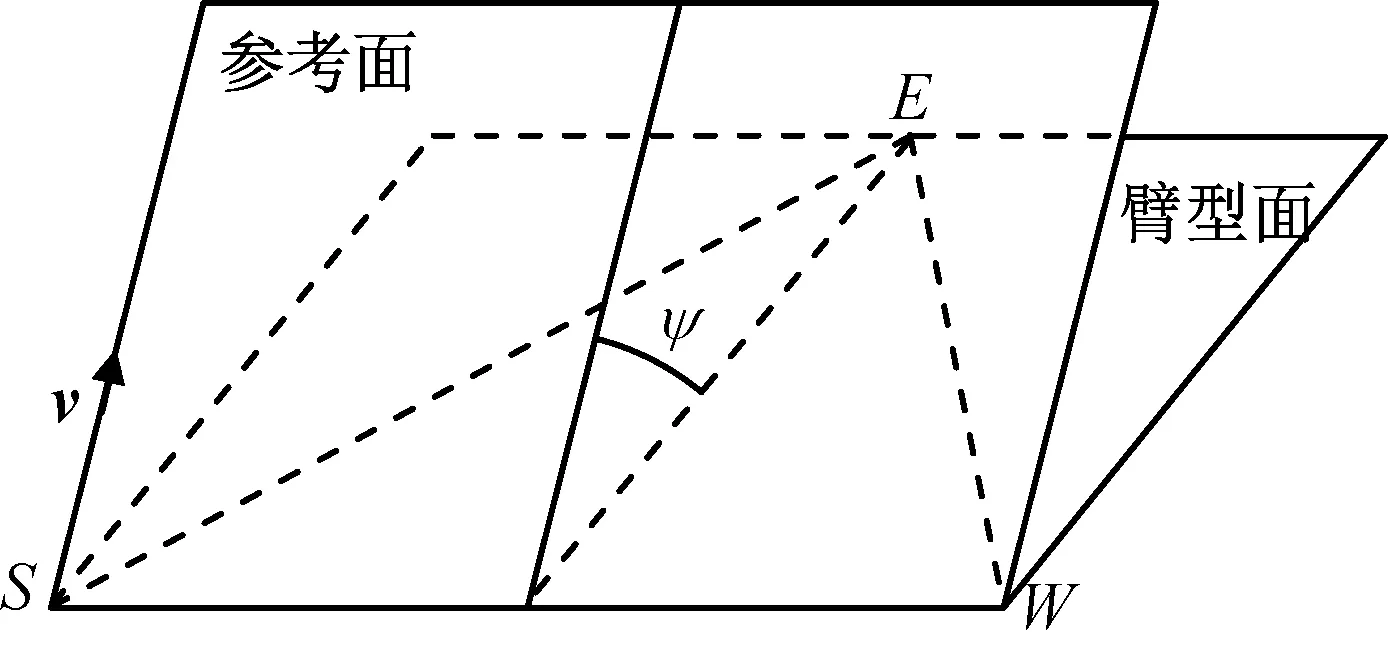
图4 臂形角定义Fig.4 Definition of arm-angle
2.2.2 肘关节角求解
根据串联机械臂正运动学,末端工具坐标系位姿在0系中可表示为
(5)
(6)
式中:iRj为i系姿态至j系中姿态的旋转矩阵;0l0s,3lse,4lew,7lwt为常值向量,且
(7)
(8)
(9)
(10)
此处:d0s为0系原点与点S的距离;dse为点S,E的距离;dew为点E,W的距离;dwt为点W至工具坐标系(即7系)原点的距离。
(11)
则SW在0系中可表示为
0xsw=0x7-0lbs-0R77lwt=0R3(3lse+3R44lew)
(12)
假设机械臂末端的位置与姿态固定时,则SW亦固定,即0xsw固定。因此,对任意固定的末端位姿,此种S-R-S构型的冗余机械臂的自运动不改变腕关节交点W的位置,腕关节的姿态在基坐标系中的表示则取决于绕SW轴的旋转角度,即腕部的姿态取决于臂形角ψ。绕SW轴的旋转可表示为按任意轴旋转变换矩阵
0Rψ=I3+ sinψ[(0usw)×]+
(1-cosψ)[(0usw)×]2
(13)
式中:I3为三阶单位阵;0usw为与0xsw对应的单位向量;符号“×”表示反对称阵。则可得
(14)

由图3可知:当末端的位姿固定时,肘部的关节角亦是固定的。此结论可通过计算式(12)的欧式范数验证,即
(15)
(16)
(17)
将式(16)代入式(5)、(6),用臂形角表述的运动学方程可写成
(18)
(19)
(20)
式中:
(21)
2.2.3 肩关节及腕关节角求解
由于肩关节角依赖于臂形角,先计算出臂形角为零时的参考关节角。如上所述,参考关节角可由固定关节三的关节角为0求解,且参考关节角需满足
(22)

(23)
当臂形角为0时,可得转移矩阵
(24)
解得
(25)
得到臂形角为0时的第二个关节角

0xsw(3))
(26)
第一个关节角
(27)
(28)
则有
(29)
将式(13)代入式(17),可得
(30)
式中:
(31)
由于已知旋转矩阵
0R3=
(32)
式中:
根据式(30)、(32)对应元素相等,可得
(33)
(34)
(35)
式中:aSij,bSij,cSij分别为AS,BS,CS中的(i,j)元素。
同理,将式(13)代入式(19),可得
(36)
式中:
(37)
由于已知旋转矩阵
(38)
式中:
根据式(36)、(38)对应元素相等,可得
(39)
(40)
(41)
式(20)、(33)~(35)、(39)~(41)给出了冗余机械臂的求解计算公式。当给定空间双臂机器人机械臂末端的位姿时,便能求解得到各关节需到达的关节角。
3 空间双臂机器人动力学
3.1 动力学建模基础
关于动力学模型的建立方法有拉格朗日方程、牛顿欧拉法、凯恩方程等[14]。拉格朗日法从能量的角度出发,通过对广义坐标求导得到系统的广义力;牛顿欧拉法通过分析每根杆件的受力状况建立迭代形式的动力学方程,易于计算机实现。双臂机器人在执行任务操作时固联于空间站上,因双臂机器人的质量相对空间站可忽略不计,故忽略机器人与空间站的耦合作用,则文献[15]的角动量守恒方法不适于本文空间双臂机器人的建模。机器人单臂为串联结构,采用拉格朗日方程更易于重新建立空间双臂机器人的动力学模型。
拉格朗日方程为
(42)
式中:Ek,Ep,qi,Fi分别为系统的动能、势能、广义坐标和广义力。
机器人所处的环境失重,Ep项为0,拉格朗日方程式(42)可改写为
(43)
由式(43)可知:对双臂机器人的动力学分析只需求出整机系统的动能,再对广义坐标求导就可得系统所受的广义力。
求解中,建立坐标系并取广义坐标qr(i),ql(j),其中1≤i≤n,1≤j≤m。令qr(i)为右臂第i关节的关节角度,ql(j)为左臂第j关节的关节角度;ωbase,ωtar分别为基座和目标操作物的角速度;mr(i)为右臂第i杆的质量,ml(j)为左臂第j杆的质量;mbase,mtar分别为基座和目标操作物的质量;Ir(i)为右臂第i关节的惯性张量,Il(j)为左臂第j关节的惯性张量;Ibase,Itar分别为基座和目标操作物的惯性张量。取左、右臂杆件质心的笛卡尔坐标分别为(xr(i),yr(i),zr(i)),(xl(i),yl(i),zl(i));取基座和目标操作物质心的笛卡尔坐标分别为(xbase,ybase,zbase),(xtar,ytar,ztar)。
空间双臂机器人系统的总动能为左臂、右臂、基座,以及目标操作物的动能之和,即
(44)
式中:η1,η2为二元判定参数,取值为0或1。此处:右臂、左臂、基座和目标操作物的动能分别为
(45)
(46)
Ibase(ωbase)2]
(47)
Itar(ωtar)2]
(48)
当ηi(i=1,2)取0时,系统不存在对应动能计算项,此时该物体静止;当ηi取1时,系统存在对应动能计算项,此时该物体运动。
3.2 空间双臂机器人动力学模型
空间双臂机器人在执行任务过程中涉及双臂协同关系的转换和本体位型的改变。由式(44),η1对应操作物的状态,η2对应机器人本体的状态。当ηi(i=1,2)取0时,该物体静止;当ηi取1时,该物体运动。根据二元判定参数的取值组合,将机器人位型的转换归纳为4种工况:当η1=0,η2=0时,机器人本体固定,双臂运动;当η1=1,η2=0时,双臂均抓紧扶手,机器人本体运动;当η1=0,η2=1时,对应双臂均抓紧扶手、机器人本体运动,以及单臂抓住扶手、机器人本体和另外一只臂运动两种工况。基于式(43),建立4种工况对应的动力学模型。
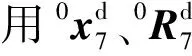
3.2.1 工况1——机器人本体固定,双臂运动
该工况发生在从初始状态到协同操作状态的转换过程中,此时左右臂同时运动,但不执行末端操作,如图5(a)所示。图5(a)中:空间双臂机器人本体固联于空间站电气桩上,双臂运动为插拔电气元件做准备。
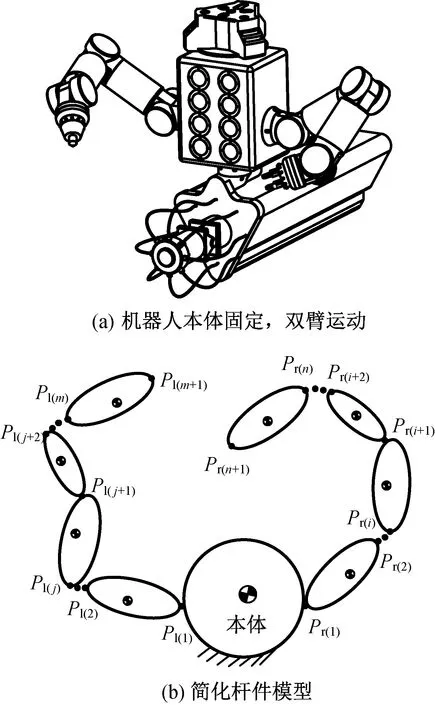
图5 工况1Fig.5 Case 1
工况1的机器人简化杆件模型如图5(b)所示,可分别求出指定运动情况下的左右臂的关节力矩。图5中:Pl(j),Pr(i)分别为左臂第j关节、右臂第i关节的坐标。该工况的系统动能可表示为
(49)
3.2.2 工况2——机器人本体固定,双臂协同操作
该工况发生在机器人固定在一个固定工位,双臂共同完成协同任务,如共同拆装航天器插件、拧螺丝等时。机器人本体固定在空间站电气桩上,双臂协同操作进行航天器插件的拆装维护工作,如图6所示。

图6 工况2Fig.6 Case 2
在图6(b)杆件简化模型中目标操作物也处于运动状态,需在计算系统动能时加入目标操作物的动能,目标操作物的位姿则可由左右臂的协同关系解得。该工况的系统动能可表示为
(50)
3.2.3 工况3——双臂均抓紧扶手,机器人本体运动
该工况发生在机器人在空间站上自主从一个工位转移到另一个工位时,此时需调整本体的位置。在此过程中左右臂末端杆件固定,本体发生运动,如图7所示。
图7 工况3Fig.7 Case 3
在图7(b)杆件的简化模型中机器人本体运动,左右臂末端固定。计算系统动能时左右臂末端杆件动能为0。机器人本体位姿则可由左右臂的协同关系来解得。该工况的系统动能可表示为
(51)
3.2.4 工况4——单臂抓住扶手,机器人本体和另外一只臂运动
该工况发生在机器人在空间站上工位转移过程中。机器人一只臂抓住空间站扶手,另一只臂准备抓住下一工位的扶手,如图8所示。
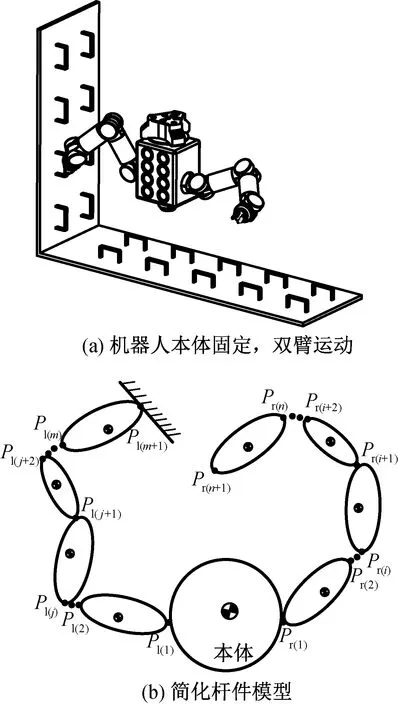
图8 工况4Fig.8 Case 4
在如图8(b)所示杆件简化模型中,左臂的末端固定,其余杆件,包括基座均处于动态,因此可用串联臂的解法求出各杆件位置。该工况的系统动能可表示为
(52)
将式(49)~(52)代入式(44),可得简化形式的动力学方程为
τ
(53)
4 结束语
本文对失重状态下的空间双臂机器人的运动学及动力学建模进行了研究。由分析实际工程应用中的双臂机器人的结构参数,用臂形角的解法,给出了求解效率更高的空间双臂机器人的运动学逆解解析方法。分析了空间双臂机器人在执行任务中的状态,引入二元判定参数,归纳得到了双臂独立运动、双臂协同操作、闭链本体漂浮、开链本体漂浮4种强耦合、非线性工作状态下的动力学模型。通过对空间双臂机器人变构型工作状态下的运动学及动力学分析,为后续空间双臂机器人的研制提供理论基础。后续将构造虚拟工况,对空间双臂机器人的运动学及动力学特性做进一步的研究与验证。
[1] 梁斌, 杜晓东, 李成, 等. 空间机器人非合作航天器在轨服务研究进展[J]. 机器人, 2012, 34(2): 242-256.
[2] FLORES-ABAD A, MA O, PHAM K, et al. A review of space robotics technologies for on-orbit servicing[J]. Progress in Aerospace Sciences, 2014, 68: 1-26.
[3] REMBALA R, OWER C. Robotic assembly and maintenance of future space stations based on the ISS mission operations experience[J]. Acta Astronautica, 2009, 65(7-8): 912-920.
[4] NASA. Dextre, Space Electrician: Canadian robot repairs components on the Space Station[EB/OL]. [2016 -12 -29]. https://www.nasa.gov/mission_pages/station/structure/space_electrician.html.
[5] DIFTLER M A, MEHLING J S, ABDALLAH M E, et al. Robonaut 2—the first humanoid robot in space[C]// IEEE International Conference on Robotics and Automation. Shanghai, IEEE, 2011: 2178-2183.
[6] MACIEJEWSKI A A. Obstacle avoidance for kinematically redundant manipulators[J]. International Journal of Robotics Research, 1985, 4(3): 109-117.
[7] TAN F C, DUBEY R V. A weighted least-norm solution based scheme for avoiding joint limits for redundant joint manipulators[J]. IEEE Transactions on Robotics & Automation, 1993, 11(2): 286-292.
[8] CHIAVERINI S. Singularity-robust task-priority redundancy resolution for real-time kinematic control of robot manipulators[J]. IEEE Transactions on Robotics and Automation, 1997, 13(3): 398-410.
[9] NEDUNGADI A, KAZEROUINIAN K. A local solution with global characteristics for the joint torque optimization of a redundant manipulator[J]. Journal of Robotic Systems, 1989, 6(5): 631-654.
[10] YOSHIKAWA T. Manipulability of robotic mechanisms[J]. The International Journal of Robotics Research, 1985, 4(2): 3-9.
[11] NAKAMURA Y, HANAFUSA H. Inverse kinematic solutions with singularity robustness for robot manipulator control[J]. Journal of Dynamic Systems Measurement & Control, 1986, 108(3): 163-171.
[12] LUCA A D, ORIOLO G. The reduced gradient method for solving redundancy in robot arms[J]. Robotersysteme, 1991, 7: 117-122.
[13] SHIMIZU M, KAKUYA H, YOON W K, et al. Analytical inverse kinematic computation for 7-DOF redundant manipulators with joint limits and its application to redundancy resolution[J]. IEEE Transactions on Robotics, 2008, 24(5): 1131-1142.
[14] 张策. 机械动力学[M]. 2版. 北京: 高等教育出版社, 2008.
[15] 颜世佐. 空间机器人协调控制与地面实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2009.
[16] SICILIANO B. Robotics: modelling planning and control[M]. London: Springer, 2009.
Kinematics and Dynamics Modeling for Dual-Arm Space Robot
WU Chang-zheng1, LIU Dian-fu2, YUE Yi1, 3, WEI Bao-chen1
(1. State Key Laboratory of Mechanical System and Vibration, Shanghai Jiao Tong University,Shanghai 200240, China; 2. Aerospace System Engineering Shanghai, Shanghai 201109, China; 3. Shanghai Aerospace Equipments Manufacturer, Shanghai 200245, China)
To establish the kinematics and dynamics model of dual-arm space robot, a study was made to analysis the characters of the robot in non-gravity environment and modeling in this paper. The formulation for forward kinematics of the right and left arm was given out in terms of the robot’s DH parameters. A more efficiency method to solve the inverse kinematics for redundant was derived based on the arm-angle approach. The 2 coefficients of determination parameters were introduced to describe the working condition for space robot. The working condition was analyzed for dual-arm space robot and 4 different kinds of dynamics equations were given based on the Lagrange’s equations, which were the two arms moved independently, the two arms cooperated, the base floating with closed chain and the base floating with open chain. The modeling of kinematics and dynamics laid the foundation for the design and analysis for dual-arm space robot.
dual-arm space robot; redundant; analytical; inverse kinematics; dynamics; non-gravity; modeling; coefficient of determination
1006-1630(2017)03-0080-08
2017-01-12;
2017-03-06
国家自然科学基金资助(61473187);教育部青年教师基金资助(20130073120045);航天先进技术联合研究中心技术创新项目资助(USCAST2015-36)
吴长征(1992—),男,硕士生,主要从事机器人运动规划研究。
TP242.3
A
10.19328/j.cnki.1006-1630.2017.03.011
