一种低摩擦间隙可控机构在舵机上的应用*
2017-07-05武晓峰申振丰韩子晨唐剑超
蒋 政,武晓峰,申振丰,韩子晨,唐剑超
(上海航天控制技术研究所,上海 201109)
一种低摩擦间隙可控机构在舵机上的应用*
蒋 政,武晓峰,申振丰,韩子晨,唐剑超
(上海航天控制技术研究所,上海 201109)
摩擦和间隙是影响电动舵机结构力学特性的典型非线性因素.基于电动舵机伺服系统模型,研究摩擦、间隙非线性因素的特性及其对舵机控制的影响.设计一种低摩擦力、间隙可控舵机传动机构,进行实验与仿真分析.结果表明,该新型传动机构能够改善传统舵机摩擦阻力大、间隙可控性差的状况,并提高舵机控制的精度和稳定性,为电动舵机伺服系统结构特性研究和控制系统研究提供基础. 关键词: 舵机;摩擦;间隙;非线性
0 引 言
电动舵机是飞行器姿态控制的执行机构,其结构力学特性对控制系统的跟踪精度影响极大.由于设计与制造工艺限制,舵机结构无法避免摩擦、间隙、阻尼、死区等非线性因素,其中摩擦和间隙作为最典型的非线性因素,影响尤其突出.目前对电动舵机结构力学非线性特性的解决方案主要集中于对系统控制方法的研究,文献[1-4]分别采用自适应、滑模变结构、自抗扰、智能控制等现代控制方法对摩擦和间隙进行了补偿研究,但该类控制方法相对复杂且不易于工程实现,而且对舵机结构本身的力学特性研究较少.文献[5]通过对传统舵机系统静刚度特性的理论分析和试验研究,提出了对具有间隙、摩擦强非线性因素舵机机构的建模和分析方法.本文从控制摩擦和间隙出发,设计了一种低摩擦间隙可调舵机传动机构,并基于文献[5]的建模方法进行动力学仿真分析和实验研究.
1 舵机典型非线性因素特性
1.1 舵机结构非线性来源
电动舵机主要由伺服电机、减速齿轮、滚珠丝杠、摇臂拨叉、舵轴等结构组成,如图1所示.
其非线性环节产生于具有相对运动的接触零部件之间,其中摩擦和间隙是最主要的非线性环节.舵机摩擦主要来源于轴承摩擦、齿轮啮合摩擦、丝杠与螺母摩擦以及螺母拨杆与舵机摇臂的摩擦等;电动舵机的间隙主要来源于零件设计、加工和装配时产生的误差、齿轮与齿轮之间的啮合间隙、轴承游隙以及机械零部件之间的磨损等.
各级传动对总的摩擦和间隙都会产生影响,但靠近输出级传动的摩擦和间隙影响最大.电动舵机末级一般采用摇臂拨叉与螺母拨杆配合传动,拨叉与拨杆接触相对滑动使得摇臂转动,带动舵轴转动.在实际工作过程中,拨叉和拨杆的加工误差、安装误差会使得拨叉与拨杆之间存在间隙,该间隙会导致舵轴的转动产生滞后,也会导致传动过程产生噪声和冲击.同时,由于拨叉与拨杆之间的接触,相对运动时产生很强的滑动摩擦力,会导致接触面磨损,从而加大两者之间的间隙.由于摩擦和间隙等非线性因素的存在,舵机结构的力学特性并不稳定,难以实现系统的精确跟踪和稳定控制.
1.2 摩擦与间隙因素的影响
非线性摩擦使得舵机系统容易出现卡滞、滑动等跳跃运动,此外摩擦的不连续性使得系统可能出现“平顶”现象[4].因此,电动舵机伺服机构在非线性摩擦力的影响下是一个非常复杂的系统.
舵机传动机构中较大的摩擦阻力会引起系统在加载和卸载过程中产生能耗,进而导致舵机刚度曲线出现滞回环[6],如图2所示,影响系统的模态.摩擦作用越大、时间越长,由摩擦产生的能量损耗越大,系统的线性度越差,传动效率也越低.同时,电动舵机中较大的摩擦还会导致传动机构的发热和磨损,进一步影响传动的间隙,使得传动过程产生滞后.对于实际的电动舵机,应使传动部件间保持良好的润滑,尽量减少摩擦作用,减少传动过程的能量损失,提高传动效率.
舵机间隙的非线性特点是当输入指令的方向发生变化时,输出量保持不变,直到指令变化超出一定数值(间隙)后,输出量才跟随变化.与摩擦非线性类似,正反向输入时,间隙也会形成迟滞环,如图3所示,使系统产生相位滞后,影响系统快速性.间隙过大导致机构的刚度降低,从而影响舵机的模态.同时由于间隙的存在,机构承载时有冲击现象,降低了机构的可靠性.图4是针对拨叉式舵机传动机构的间隙仿真结果:当间隙δ=0时,刚度曲线基本线性,当间隙为负即过盈时,由于预紧作用刚度曲线在零点附近呈非线性;当间隙大于0时,非线性刚度表现为空程晃动,间隙越大晃动越大.
同时,摩擦和间隙达到一定值时,系统可能出现自持振荡现象,此时系统的动态性能显著下降,有附加的能量消耗,控制效率显著降低,使系统的稳定性下降(如图5所示).
2 低摩擦间隙可调机构
一般舵机传动机构常常通过与舵轴固连的拨叉与丝杠螺母配合,将螺母的直线运动转换为拨叉的转动,进而驱动舵轴偏转,如图6(a)所示.为减少摩擦和间隙,以往设计中常在拨杆与拨叉之间安装轴承,或直接使拨杆在开槽内滑动来实现.但由于轴承自身游隙无法消除,易使系统振荡,过盈配合虽然可消除间隙,但是拨杆与拨叉之间为相对滑动,且过盈额外增加了拨叉与拨杆之间的滑动摩擦力,使系统功耗加大,响应变慢,摩擦引起构件磨损,进一步导致间隙变大.因此需改进现有传动结构,使之既满足间隙控制要求又降低传动摩擦.
为解决上述技术问题,设计一种新型低摩擦力间隙可控传动机构,如图6(b)所示,包括摇臂、内外侧消隙环等.该传动机构结合前述轴承连接和过盈连接的各自优点,改善丝杠螺母拨杆与摇臂的接触,并且使两者之间配合间隙可控.摇臂具有两个偏置轨道,滚珠丝杠螺母拨杆与摇臂之间安装两个内径略大于拨杆直径的消隙环,分别位于摇臂两个轨道内.两个消隙环内圈均与螺母拨杆外圆柱面接触,通过调整消隙环厚度,使外侧消隙环与外侧滚道上边接触,内侧消隙环与内侧轨道下边接触,从而使丝杠螺母拨杆与摇臂的间隙可调.进一步,由于内外侧消隙环仅与各自轨道单边接触,因而丝杠螺母上下移动时,将带动内外侧消隙环在轨道内滚动,大大减小摩擦.同时,摇臂轨道内可容纳足量润滑脂,可进一步减小构件磨损从而使间隙可控.
图7是机构运动时消隙环的受力情况,以图7(a)为例分析外侧消隙环如何在运动中形成滚动,以滚动摩擦代替过盈配合的滑动摩擦:滚珠丝杠螺母上行,对外侧消隙环产生作用力F及摩擦力f1,作用点为P;外侧消隙环与摇臂外侧轨道上边紧密接触,摇臂对外侧消隙环产生支撑力N及摩擦力f,两力均作用于Q点.假设摇臂与水平方向夹角为θ,忽略外侧消隙环自重,对消隙环作受力分析:
其中,To为外侧消隙环绕O点的转矩,R为丝杠螺母拨杆半径,h为消隙环实际厚度.在滚珠丝杠螺母向上移动时,f、f1均大于零,因此在力矩To的作用下外侧消隙环将绕Q点转动.当丝杠螺母连续运动时消隙环将在外侧轨道里形成滚动,从而有效地减少摩擦阻力,提高机构的工作效率.同样的原理也适用于丝杠螺母下行,此时内侧消隙环将在内侧轨道里滚动,其受力情况如图7(b)所示.
上述新型传动机构之间如果过盈配合或者间隙太小,消隙环难以实现滚动摩擦,如果间隙过大又无法保证传动精度,通过控制两个消隙环的公差厚度可以实现传动间隙的调整.
3 实验与仿真分析
本文充分考虑电动舵机伺服系统存在摩擦和间隙等影响因素,利用ADAMS软件建立上述两种电动舵机伺服机构的动力学模型.由于摩擦等参数难以直接测量评判,通过实验对舵机结构进行间隙测试,根据实验数据调整模型中各项参数,保证模型的准确性.同时为了进一步了解舵机结构对伺服控制系统的响应特性,需要在SIMULINK中建立电动舵机的伺服控制系统,将ADAMS舵机动力学模型作为被控制对象,实现电动舵机伺服系统的ADAMS/SIMULINK联合仿真[7].
3.1 实验与参数研究
实验中,间隙测量装置采用两个高精度数字接触式传感器,角度分辨率力为0.75″,测量精度为1″[8].实际测量电动舵机传动间隙时,舵机处于初始位置,对舵面施加5 N·m的扭矩,由于电动舵机存在传动间隙,此时舵面会转动一个角度,直到传动间隙因各部件接触而消除,舵面转动的角度称为间隙角.为减小测量误差,对磨合前后的舵机都进行3次测量,磨合指令为幅值10 V的正弦波,频率0.4 Hz,磨合时间10 min.两种舵机结构的间隙测量值如表1 所示.从表中结果来看,磨合后舵机的间隙变大,这是由于磨合过程中较大的摩擦力使构件产生磨损,导致接触间隙变大.相对于拨叉式传动机构,磨合后新型传动机构的间隙变化量较小,表明该传动机构能够实现较低摩擦阻力和间隙控制.
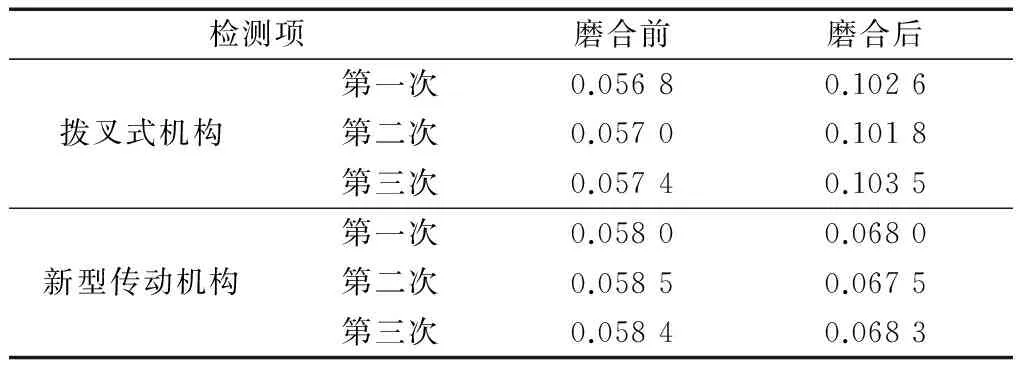
表1 两种传动机构下舵面间隙角度测量结果Tab.1 The results of clearance test for different actuator structures /(°)
由于摩擦参数难以直接测量获得,为进一步研究摩擦对舵面间隙角的影响,建立两种舵机结构的ADAMS动力学模型,改变摩擦系数,观察舵轴间隙角的变化情况.以新型传动机构为例(如图8所示),当摩擦系数增大时,舵面达到间隙角的时间越长.这是因为摩擦作用越大,在相同的扭矩驱动下,舵面角加速度较小,角位移的变化较慢.同时,摩擦作用越大,作用的时间越长,由于摩擦产生的能量损耗越大,传动效率也越低,使得传动过程产生滞后.
取摩擦系数μ=0.1,设定末级传动(摇臂与消隙环)的间隙为0.045 mm时,舵机的仿真间隙角为0.063 4°;当间隙为0.05 mm时,仿真结果为0.070 1°.实验测得磨合后的间隙角为0.067 5°~0.068 3°,则应该控制末级传动间隙在0.045~0.05 mm 范围内才能保证所建立的动力学模型和实际相吻合.
针对拨叉式舵机结构,采用同样的参数试验方法,取摩擦系数0.1,当设定末级传动(摇臂与拨叉)的间隙为0.065~0.07 mm时,仿真与间隙测试结果比较吻合.
3.2 仿真结果与分析
为了进一步了解舵机结构对伺服控制系统的响应特性,建立两种电动舵机伺服系统的ADAMS/SIMULINK联合仿真模型.基于同样的PID控制算法,分别采用上述参数设置,使用正弦信号作为输入量进行仿真.图10中(a)和(b)分别为两种舵机结构的输出响应.
仿真结果表明,拨叉式舵机结构的响应曲线有明显的振荡现象.这是由于拨叉与拨杆相对运动产生较大的滑动摩擦力,舵机磨合后,较大的摩擦力导致接触间隙变大,系统结构刚度变差,同时较大的摩擦和间隙导致系统的动态性能显著下降,有附加的能量消耗,控制效率显著降低,系统出现自持振荡现象,稳定性下降.而新型舵机结构由于消隙环的滚动效应,大大降低了摩擦阻力,即使磨合后,机构的间隙变化量也不大,在系统的控制算法下可以实现稳定的控制.值得一提的是,通过改进控制算法,也可以提高系统的非线性包容度.
4 结 论
本文分析了舵机结构中摩擦和间隙非线性因素特性,对现有舵机传动机构进行改进,设计了一种低摩擦且间隙可控舵机结构,即满足间隙控制要求,又降低了传动摩擦.基于间隙测试数据,建立了较为准确的舵机传动机构的动力学模型,实现了ADAMS/SIMULINK联合仿真,结果表明新的传动机构改善了舵机的力学性能,为改善电动舵机伺服系统的动力学特性提供了方案.
[1] 肖前进, 贾宏光, 章家保, 等. 电动舵机伺服系统非线性辨识及补偿[J]. 光学精密工程, 2013, 21(8): 2038-2047. XIAO Q J, JIA H G, ZHANG J B, et al. Identification and compensation of nonlinearity for electromechanical actuator servo system[J]. Optics and Precision Engineering, 2013,21(8): 2038- 2047.
[2] 杨尧, 赵岳楼, 闫杰. 高超声速飞行器舵机摩擦的影响及其抑制方法[J]. 指挥控制与仿真, 2014, 36(2): 85-91. YANG Y, ZHAO Y L, YAN J. Effection and restrained of acutaor friction on hypersonic vehicle[J]. Command Control & Simulation, 2014, 36(2): 85-91.
[3] 黄立梅,吴成富,马松辉. 抑制飞控系统舵机间隙影响的非线性补偿器设计[J]. 飞行力学, 2012, 30(2): 132-138. HUANG L M,WU C F,MA S H. Design of a nonlinear compensator for depressing the influence of actuator’s clearance in flight control system[J] . Flight Dynamics, 2012, 30(2): 132-138.
[4] 彭书华,李华德,苏中. 非线性摩擦干扰下的电动舵机滑模变结构控制[J]. 信息与控制, 2008, 37(5): 637-640. PENG S H,LI H D,SU Z. Sliding mode variable structure control for electromechanical actuator with nonlin ear friction[J]. Information and Control, 2008, 37(5): 637-640.
[5] 张鹏, 张开敏, 沈颖. 舵机结构非线性力学特性研究[J]. 航空兵器, 2015, 6(3): 38-43. ZHANG P,ZHANG K M,SHEN Y. Research on nonlinear mechanical properties for actuator structure[J]. Aero Weaponry, 2015, 6(3): 38-43.
[6] 史丽楠, 符文星, 闫杰. 导弹舵机非线性因素对高精度姿态控制影响的研究[J]. 飞行器测控学报, 2010, 29(1): 54-59. SHI L N, FU W X, YAN J. Investigation on the impact of non-linear factors of missile rudders on high-accuracy attitude control[J]. Journal of Spacecraft TT&C Technolog, 2010, 29(1): 54-59.
[7] 马如奇, 郝双晖, 郑伟峰. 基于MATLAB与ADAMS的机械臂联合仿真研究 [J]. 机械设计与制造, 2010, 4(4): 93-95. MA R Q,HAO S H,ZHENG W F. Research on coordinated simulation of robot arm based on MATLAB and ADAMS[J].Machinery Design&Manufacture, 2010, 4(4): 93-95.
[8] 范文浩,毕树生,王巍,等. 舵机刚度及间隙测试设备的设计与研究[J]. 机械工程与自动化, 2016, 4(10): 1971-1976. FAN W H, BI S S, WANG W, et al. Research and design of device to test stiffness and clearance of rudder [J]. Mechanical Engineering & Automation, 2016,4(10): 1971-1976.
New Transmission Device for Actuator withLow Friction and Controllable Clearance
JIANG Zheng, WU Xiaofeng, SHEN Zhenfeng, HAN Zichen, TANG Jianchao
(ShanghaiAerospaceControlTechnologyInstitute,Shanghai201109,China)
Nonlinear factors such as friction and clearance have definite influences on mechanical properties of electric actuator structure. To investigate the impact of non-linearity on actuator control, typical non-linear characteristics existing in the transmission device are introduced. A new transmission device is designed, which has low friction and controllable clearance. Experiment and simulation results show that the new transmission device has better performances in friction and clearance condition compared with general transmission structure. With new transmission device, both control accuracy and stability of actuator are achieved, which can provide basis for the analysis of structure properties and the research of control system.
actuator structure; friction; clearance; nonlinear
*上海市自然科学基金资助项目(16ZR1415700)和上海航天科技创新基金资助项目(SAST2016075).
2016-03-02
蒋 政(1989—),男,工程师,研究方向为战术导弹伺服机构设计;武晓峰(1984—),男,工程师,研究方向为战术导弹伺服机构设计;申振丰(1979—),男,工程师,研究方向为光学精密加工技术;韩子晨(1984—),男,工程师,研究方向为战术导弹伺服机构设计;唐剑超(1981—),男,工艺师,研究方向为电动舵机先进制造工艺.
TH112
A
1674-1579(2017)03-0054-05
10.3969/j.issn.1674-1579.2017.03.009
