月球背面地形对软着陆探测的影响分析
2017-07-03李飞张熇吴学英马继楠卢亮亮
李飞,张熇,吴学英,马继楠,卢亮亮
(1. 北京空间飞行器总体设计部,北京 100094;2. 探月与航天工程中心,北京 100037)
月球背面地形对软着陆探测的影响分析
李飞1*,张熇1,吴学英1,马继楠1,卢亮亮2
(1. 北京空间飞行器总体设计部,北京 100094;2. 探月与航天工程中心,北京 100037)
相对于月球正面大面积平坦的月海区域,月球背面地形整体崎岖复杂,因此地形地貌的变化会对探测器的软着陆探测产生一定的影响。从任务设计、着陆器设计和月面工作程序3个方面分析了“嫦娥4号”着陆区南极–艾特肯盆地(South-Pole Aitken Basin,SPA),及其相对于“嫦娥3号”着陆区的变化,主要结论包括:1)着陆区范围缩小,由“嫦娥3号”着陆区经度范围16.4°和纬度范围3°,减小到经度范围约4°和纬度范围约2°;2)动力下降策略更改,动力下降过程主减速段结束后,着陆器由斜向前运动轨迹改为接近垂直向下运动轨迹,同时更改测距敏感器的引入时机;3)提高微波测距测速敏感器信号发射功率和信噪比;4)着陆后需要预测着陆器的光照和测控被地形遮挡的情况,然后制定如休眠或月食模式等相应策略等。通过以上优化设计,“嫦娥4号”任务可适应月球背面地形地貌的变化,有效降低着陆过程和月面工作的风险。
嫦娥4号;月球背面;南极–艾特肯盆地;软着陆;地形地貌
0 引 言
月球的软着陆探测是一种就位的探测方式,相比于遥感探测,可以获得更精细、更深入的探测成果,是人类开展月球科学研究和开发利用月球资源的重要手段;同时也是建立月球基地、开展载人登月等活动所必须掌握的关键技术[1-2]。2013年12月15日,我国的“嫦娥3号”着陆器成功着陆月球正面虹湾地区,实现探月工程“绕、落、回”三步走“落”的目标,成为世界第三个成功实施月球软着陆的国家[3]。
对于月球软着陆探测任务,着陆区的分析是总体设计的首要工作,而着陆区地形地貌是着陆区分析最重要的方面之一,反过来又制约着陆区的选择。对于探测器设计来说,着陆区地形地貌主要影响着陆导航控制策略的制定、推进能力的需求以及着陆缓冲的设计。“嫦娥3号”的着陆区位于月球正面的虹湾地区,为平坦月海地形,具有大面积较为平坦的区域,根据其高程变化规律,坡度、撞击坑和石块的分布情况开展了任务设计。
“嫦娥4号”探测器将实现人类首次月球背面软着陆。月球背面分布着大量高地地形,在高地上遍布着大量撞击坑和环形山。在背面的南部分布着著名的(South-Pole Aitken Basin,SPA)盆地,“嫦娥4号”任务的着陆区就选择在南极–艾特肯盆地SPA内。相比“嫦娥3号”任务的虹湾着陆区而言,SPA存在两方面明显差异:一是虹湾属于平坦月海地形,而SPA属于高地地形,更加崎岖复杂,很少有大面积的平坦区域;二是由于SPA周边高山较多,可能出现地形对着陆器的通信和光照的遮挡。
本文首先研究了月球背面SPA地形地貌的特点,然后分析了其对着陆探测任务的影响,重点分析了此次任务相对于“嫦娥3号”任务的变化,并根据变化在“嫦娥3号”设计的基础上提出了相应的技术优化途径。
1 月面背面地形特点
SPA的中心纬度位于40~60°S,中心经度位于180°附近,直径达2 000~2 600 km,是太阳系中规模最大、最古老的撞击盆地,具有极高的科学研究价值[4-6],如图 1所示,虚线圆形区域内为SPA地区。“嫦娥3号”和“嫦娥4号”着陆位置对比如图 2所示。图中颜色越深的区域表示海拔越低,颜色越浅的区域表示海拔越高,由此可见SPA明显比周围地形低很多,是月球上海拔最低的区域。
SPA同月球正面虹湾着陆区的主要区别如下:
1)地形崎岖无大片平坦区域
SPA内部地形复杂,大型撞击盆地密布,难以找到大片的平坦区域,而“嫦娥3号”的虹湾地区月面经纬度范围分别为44.1 ± 1.5°N、18.2~34.6°W,面积广大,整个区域地势均较为平坦,如图 3所示。

图 1 南极–艾特肯盆地高程图Fig. 1 The elevation map of the SPA Basin

图 2 “嫦娥3号”和“嫦娥4号”着陆区位置分布图Fig. 2 The landing sites of Chang’e-3 and Chang’e-4

图 3 “嫦娥3号”和“嫦娥4号”着陆区高程图Fig. 3 The elevation map of landing area of Chang’e-3 and Chang’e-4
2)着陆航迹的地形起伏
着陆过程中,着陆器飞行在月面上的航迹约450 km。在此过程中,需利用对月测距测速的信息作为着陆过程控制的导航信息。月球正面虹湾地区的航迹高程起伏变化小,最大约3 km,且单调性较好,由南向北地势逐渐降低,如图 4所示。横轴表示着陆器从动力下降发动机点火开始直至着陆月面飞行的水平距离,纵轴表示高度变化(航迹约450 km,对应高程差约0.85 km,高程基准为相对于1 737.4 km月球标称半径)。月球背面航迹的高程起伏相对正面增大到最大可达7 km。图 5是一条典型航迹曲线(航程约450 km,对应高程差约3.7 km,高程基准为相对于1 737.4 km月球标称半径),航迹高程先升高又降低,这会带来导航信息的跳跃,给控制策略的制定带来极大困难。

图 4 月球正面虹湾着陆区典型航迹曲线图Fig. 4 A typical trajectory elevation on the nearside of the Moon
3)月面物质成分差异
各类月球探测器的探测数据表明[7-8],SPA具有独特的地球化学特征。SPA是月球背面氧化铁(FeO)和二氧化钛(TiO2)异常区域,含有较高的Fe、Ti元素。如图 6所示,FeO的含量从盆地中央到边缘逐渐降低,盆地内的FeO含量较周边高出7%;其内部有些地方的TiO2含量有增强的现象。SPA中FeO平均含量约10 wt.%,TiO2的平均含量约1.5 wt.%[9]。
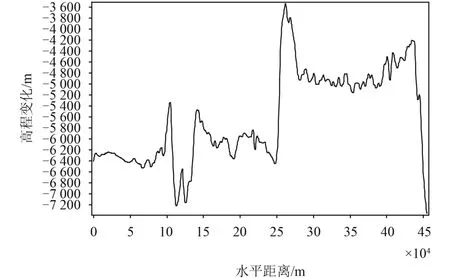
图 5 月球背面着陆区典型航迹曲线图Fig. 5 A typical trajectory elevation on the farside of the Moon

图 6 月球背面FeO和TiO2丰度分布图[9]Fig. 6 The abundance distribution of FeO and TiO2on the farside of the Moon[9]
月球正面的月海区域,FeO的含量一般大于11 wt.%,某些地区可以高达20 wt.%以上;TiO2正面平均含量在4 wt.%左右(如图 7~8所示)。SPA中的FeO和TiO2的含量均低于正面,这会引起月面微波后向散射系数下降,将给微波测距、测速的敏感器的设计带来一定的影响。
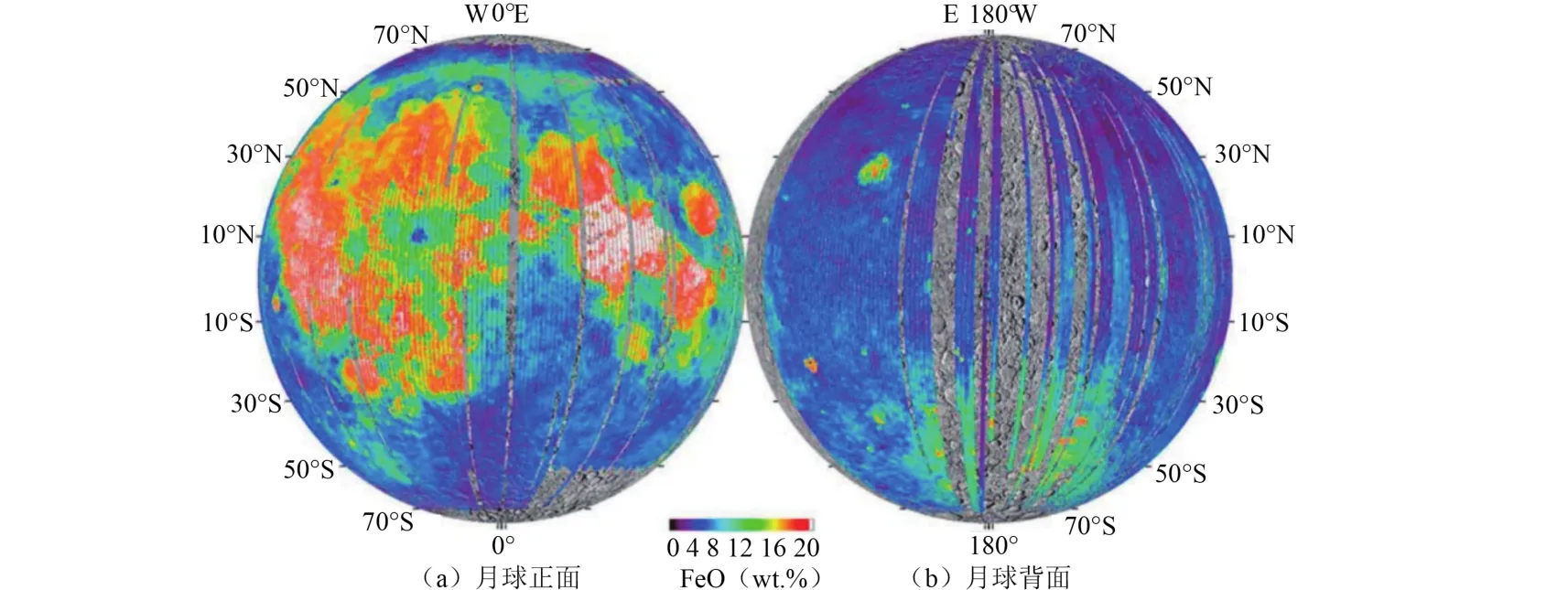
图 7 月球正面和背面FeO丰度对比图[10]Fig. 7 Orthographic projections showing the difference of FeO

图 8 月球正面和背面TiO2丰度对比图[10]Fig. 8 Orthographic projections showing the difference of TiO2
2 对月球软着陆探测影响
地形地貌影响主要对任务设计、探测器设计和月面工作过程3个方面产生影响,主要说明如下。
2.1 任务设计影响
月球SPA内地形崎岖复杂,无法找到类似“嫦娥3号”的大范围平坦的着陆区,因此要求“嫦娥4号”着陆区的选择范围在满足各项轨道预报误差、在轨控制误差的情况下,尽可能缩小范围,以寻求相对平坦的月面区域。相对于“嫦娥3号”,“嫦娥4号”将针对不同的发射窗口,设计不同轨道倾角的环月轨道,同时在环月期间增加轨道精细化调整;通过7 500 N变推力发动机的在轨精细标定,实现动力下降过程航迹的更高精度控制。最终实现着陆点散布在较为平坦的较小的范围内。
“嫦娥4号”着陆区在经度方向上需考虑如下因素[11]:①考虑中途修正、近月制动等轨控误差的影响,环月轨道倾角相对标称设计值会存在一定误差,需考虑该误差在着陆区经度方向的传递;②为进一步缩小着陆区经度范围,可考虑在100 km × 100 km环月运行时根据环月后轨道预报情况,择机进行一次轨道面调整变轨机动,将着陆点经度偏差缩减,会带来少量速度增量的增加;③通过动力下降过程中打靶仿真,动力下降过程中导致的着陆区经度方向存在千米级的偏差。
“嫦娥4号”着陆区在纬度方向上需考虑如下因素:考虑动力下降初始点轨道预报误差、着陆器7 500 N发动机推力偏差等因素后,应通过动力下降仿真打靶计算着陆区纬度方向的偏差。
综上分析,“嫦娥4号”着陆区经度方向范围为±(1~2°),纬度方向范围为 ±(0.5~1°)。
2.2 着陆器设计影响
2.2.1 着陆缓冲设计
通过对SPA内小范围着陆区的搜索,可以初步找到与虹湾着陆区小于8°的坡所占面积百分比接近的区域,而对于着陆器自主避障的能力保持不变,着陆月面的速度、加速度、姿态指标不变,因此对着陆缓冲的设计可不发生变化。
2.2.2 动力下降控制策略
“嫦娥3号”着陆器动力下降的控制策略为:首先由导航系统确定着陆器位置、速度、姿态等状态;制导系统根据导航数据给出制导目标;控制系统基于制导目标实现最终着陆轨迹控制。因此,导航数据的准确性是完成着陆任务的前提。在进行动力下降轨迹设计时,必须要考虑导航系统中测距敏感器数据引入修正的时机以及着陆的安全性。测距引入时要求具有一定的高度,以便留出足够时间来处理纯惯导误差的影响,保证着陆安全。月面地形起伏越小,测距数据引入导航修正后,测距波束指向月面的地形变化越平稳,对导航修正越有利,能够保证整个导航制导控制系统状态的稳定[12]。
动力下降的程序参考了Apollo系列[13]和ALHAT计划[14]的飞行程序,设计了包括主减速段、快速调整段、接近段、悬停段、避障段和缓速下降段的软着陆飞行程序。主减速段消减着陆器初始速度,快速调整段衔接主减速段和后续的接近段。针对软着陆任务对落点安全和状态安全的要求,提出了一种接力避障模式,将自主避障过程分为4个任务段:接近段、悬停段、避障段和缓速下降段,分别实现粗避障、高精度三维成像、精避障和着陆位置保持功能,形成了大范围粗避障、小范围精避障和着陆位置保持的接力避障过程。
对于“嫦娥3号”着陆区,在动力下降航迹范围内,地形整体平坦、起伏小(约2 km且单调变化),因此在主减速阶段就引入测距数据,有利于及时修正惯导偏差,保证动力下降过程运动轨迹平稳。“嫦娥3号”动力下降过程见图 9(a)。

图 9 动力下降过程比较图Fig. 9 The power descent of Chang’e–3 and Chang’e–4
“嫦娥4号”着陆区为月球背面,相对“嫦娥3号”着陆区地形起伏程度明显增加(约7 km且波动明显),如仍采用“嫦娥3号”导航修正策略,由于主减速测距波束指向位置与最终实际落点位置不同,高程变化明显,提前修正存在安全性风险。因此需要优化着陆过程中的分段控制目标和导航信息引入的时机,同时进行导航算法的优化,避免地形大范围起伏的影响:即在主减速段结束后由斜向前运动轨迹改为垂直向下运动轨迹,实现测距波束指向与着陆点位置基本一致后,再引入测距敏感器数据进行惯导修正,避免基于测距敏感器获得的高度数据与着陆点地形高程不一致带来的导航偏差导致的安全风险,保证高度方向导航结果的正确性,实现安全着陆。“嫦娥4号”动力下降过程见图 9(b)。
2.2.3 导航敏感器影响
月球背面后向散射系数的降低将对微波测距测速导航敏感器的回波特性带来直接影响。月球背面微波后向散射系数减小直接导致回波信号减弱;测距、测速作用距离都将降低,因此需要通过提高微波测距测速敏感器信号发射功率和信噪比等方式补偿,确保可以获取有效的测距测速信息。
2.3 月面工作程序影响
“嫦娥4号”着陆区位于大型撞击坑内,同“嫦娥3号”虹湾着陆区相比,周围地形可能会对着陆区产生遮挡,需进行光照与测控的遮挡分析。以SPA其中某一点为例,分析其周围360°范围内的高程变化,得到遮挡仰角,如图 10所示(为增加视觉效果,高程方向增加3倍)。

图 10 遮挡角分析示意图Fig. 10 The drawing of shielding angle
1)光照遮挡
图 11是SPA中一点地形遮挡角和太阳高度角的对比图。同一方位角下,若太阳高度角大于地形遮挡角表示月面地形不会对太阳光照带来遮挡,反之表明将存在遮挡。结果表明,在一定的地形条件下,在晨昏时刻由于太阳高度角较小,地形对太阳的遮挡的可能性较大;在正午时刻,由于太阳高度角较大,对太阳遮挡的可能性较小。

图 11 地形遮挡角和太阳高度角对比Fig. 11 The comparison of the shielding angle and solar elevation angle
如发生遮挡,则着陆器在遮挡期间无光照,导致无法利用太阳电池片发电给整器供电,只能采用蓄电池供电,且整器温度会较快下降。如果时间较长,则会导致蓄电池耗尽,整器发生异常断电的风险。因此在轨任务过程中,着陆器着陆到月面以后,应尽快确定自身的位置,通过地面的月球数字地形模型的分析,以及相机对周围地形拍摄的照片的分析,初步预测出可能存在光照遮挡的方位和遮挡的时长。根据情况,考虑让整器进入休眠状态,或者设置整器进入月食模式,即关闭所有有效载荷设备,采用蓄电池短期供电,引入两相流体回路加热保温。
2)测控遮挡
如果地形遮挡了测控链路,将直接导致着陆器无法收到地面发送的上行指令,地面也无法接收到着陆器下行遥测和数传数据。对于月面正常工作情况下,可认为着陆器进入境外弧段,对整器安全没有影响。但对休眠和唤醒过程,影响如下:
(1)针对休眠过程,“嫦娥3号”的休眠流程全部由地面判发执行,若休眠前测控链路发生遮挡,则休眠流程不能执行,着陆器、巡视器不能进入休眠状态,导致着陆器、巡视器不能以安全的状态度过月夜,在工作温度和功率平衡两方面都会对整器安全产生影响。因此自主休眠方面存在新的自主能力需求。着陆以后,预估在休眠时段地形是否存在遮挡,如有遮挡,则在中继链路可见弧段注入休眠相关延时指令,休眠时刻到达后,延时指令自主执行;
(2)针对唤醒过程,着陆器、巡视器均为自主唤醒,测控遮挡不影响两器唤醒过程。唤醒后太阳高度角逐渐增加,供电功率逐渐增大,可确保整器的供电安全,但随着太阳高度角增加,整器温度也不断升高,需要软件自主关闭两项流体回路阀门,将RTG/RHU向舱内热量导入的通路断开,确保整器温度。因此唤醒过程存在自主关闭两相流体回路阀门的需求。
3 结 论
月球背面着陆区地形地貌同正面差异较大,因此不能完全继承“嫦娥3号”的设计状态,本文从任务设计、着陆器设计和月面工作程序设计3个方面开展分析,得到对着陆区范围、动力下降控制策略、导航敏感器的设计和月面工作程序影响等方面的分析结论。后续应在着陆区确定的情况下,对小范围着陆区开展更为详尽的分析,对遮挡情况进行遍历,为“嫦娥4号”细化设计输入。
[1]于登云等. 月球软着陆探测器技术[M]. 北京:国防工业出版社,2016.
[2]褚桂柏,张熇. 月球探测器技术[M]. 北京:中国科学技术出版社,2007.
[3]Sun Z Z,Jia Y,Zhang H. Technological advancements and promotion roles of Chang’e-3 lunar probe mission[J]. Science China(Technological Sciences),2013,43(11):2702-2708.
[4]张健,缪秉魁,廖庆园,等. 月球南极艾特肯盆地的地质特征:探索月球深部的窗口[J]. 矿物岩石地球化学通报,2011年,30(2):234-240.
Zhang J,Miao B K,Liao Q Y,et al. The geological characteristics of the South Pole-Aitken Basin on the Moon:the window to explore the deep composition of the Moon[J]. Bulletin of Mineralogy,Petrology and Geochemistry,2011,30(2):234-240.
[5]Kyeong J K,James M D,Jean P W. The South Pole-Aitken basin region,Moon:GIS-based geologic investigation using Kaguya elemental information[J]. Advances in Space Research,2012,50(12):1629-1637.
[6]David A K,Daniel D D. A global lunar landing site study to provide the scientific context for exploration of the Moon[R]. USA:LPI-JSC Center for Lunar Science and Exploration,2012.
[7]Peterson C A,Hawke B R,Blewett D,et al. Geochemical units on the Moon:The Role of South Pole-Aitken basin[C]//Lunar and Planetary Science XXXIII. USA:[s.n.],2002:46-47.
[8]Peterson C A,Hawke B R,Lucey P G,et al. Anorthosite on the lunar farside and its relationship to South Pole-Aitken Basin[C]//Lunar and Planetary Science XXXI. USA:[s.n.],2000:1680-1681.
[9]Lucey P G,Taylor G J,et al. FeO and TiO2 Concentrations in the South Pole-Aitken Basin:implications for mantle composition and basin formation[J]. Journal of Geophysical Research,1998,103(E2):3701-3708.
[10]Wu Y Z,Xue B,Zhao B C,et.al. Global estimates of lunar iron and titanium contents from the Chang’E-1 IIM data [J]. Journal of Geophysical Research:Planets (1991-2012),2012,117(E2):1-23.
[11]李飞,马继楠,张熇,等. 基于月球背面的嫦娥4号着陆区选择方法研究[C]//中国宇航学会深空探测技术专业委员会第十三届学术年会,上海:CDSET-CSA,2016.
[12]黄翔宇,张洪华,王大轶,等. “嫦娥3号”探测器软着陆自主导航与制导技术[J]. 深空探测学报,2014,1(1):44-51.
WANG D Y,LI J,HUANG X Y,et al. A pinpoint autonomous for navigation and hazard avoidance method lunar soft landing[J]. Journal of Deep Space Exploration,2014,1(1):44-51.
[13]Klumpp A R. Apollo guidance,navigation and control R-695[R]. [S.l.]:NASA,1971.
[14]Thomas F. Lunar landing and ascent trajectory guidance design for the Autonomous Landing and Hazard Avoidance Technology (ALHAT)Program[J]. Advances in the Astronautical Sciences,2010,136:2317-2336.
通信地址:北京市海淀区友谊路104号院5142信箱373分箱(100094)
电话:(010)68745777
E-mail:kuokuolee@163.com
Influence Analysis of Terrain of the Farside of the Moon on Soft-Landing
LI Fei1*,ZHANG He1,WU Xueying1,MA Jinan1,LU Liangliang2
(1. Institute of Spacecraft System Engineering,Beijing 100094,China;2. Lunar Exploration and Space Program Center,Beijing 100037,China)
Chang’e-4 probe is planned to land on the farside of the moon for the first time of the human being. Compared to the nearside of the moon, the terrain on the farside of the moon is rugged and complex, and there is no large flat area, so the change of the terrain will affect the soft-landing of Chang’e-4. The Chang’e-4 landing site on the South-Pole Aitken Basin is analyzed and compared wth the landing area of Chang’e-3 mission, considering the influences ofthe mission design, the lander design and the lunar working procedure. The main conclusions are as follows: 1) The latitude and longitude range of the landing area is reduced from 16.4° and 3° for Chang’e-3 mission to about 4° and 2° for Chang’e-4 mission; 2) During the power descent phase, the strategy after the main deceleration phase is changed from the oblique forward motion trajectory to the vertical down trajectory, and the operation time of the distance measuring sensor is also changed; 3) The signal transmission powers and signal to noise ratios of the microwave ranging and velocity sensor will be improved; 4) The lighting of the lander and the communication by the terrain occlusion will be prediected, and the design operation strategies such as sleep mode or eclipse mode will be established. Through the modification, Chang’e-4 mission can be adapted to the changes in the topography of the farside of the moon to reduce the risk of landing and lunar mission.
Chang’e-4;farside of the moon;South-Pole Aitken Basin;soft-landing;terrain
V476.3
A
2095-7777(2017)02-0143-07
10.15982/j.issn.2095-7777.2017.02.007
李飞(1980– ),男,高级工程师,主要研究方向:月球与深空探测总体设计。
[责任编辑:高莎,英文审校:朱鲁青]
李飞,张熇,吴学英,等. 月球背面地形对软着陆探测的影响分析[J]. 深空探测学报,2017,4(2):143-149.
Reference format: Li F,Zhang H,Wu X Y,et al. Influence analysis of terrain of the farside of the moon on softlanding [J]. Journal of Deep Space Exploration,2017,4(2):143-149.
2017-03-13
2017-03-28
