“嫦娥4号”月球背面软着陆任务设计
2017-07-03吴伟仁王琼唐玉华于国斌刘继忠张玮宁远明卢亮亮
吴伟仁,王琼,唐玉华,于国斌,刘继忠,张玮,宁远明,卢亮亮
(探月与航天工程中心,北京 100037)
“嫦娥4号”月球背面软着陆任务设计
吴伟仁,王琼*,唐玉华,于国斌,刘继忠,张玮,宁远明,卢亮亮
(探月与航天工程中心,北京 100037)
介绍了“嫦娥4号”月球背面软着陆任务设计方案。着陆区初步选定为月球背面南极–艾特肯(South Pole-Aitken,SPA)盆地内的冯•卡门(Von Kármán)撞击坑内。采用中继星实现着陆器和巡视器的对地通信,并选择环绕地月拉格朗日L2点的halo轨道作为其使命轨道。采用CZ-4C火箭和CZ-3B火箭,分别完成中继星和着陆器–巡视器组合体的发射。两器一星上共配置了6台国内研制科学载荷和3台国际合作科学载荷,开展以低频射电天文观测、巡视区形貌、矿物组份及浅层结构为主的科学探测。此外,还搭载了2颗月球轨道编队飞行微卫星、月面微型生态圈和大孔径激光角反射镜,分别开展超长波天文干涉测量试验、月面生态系统试验和超过地月距离的激光测距试验。通过创新设计顶层任务,充分继承成熟技术和产品,增加中继通信功能模块,开放资源引入高性能载荷和搭载项目,将实现一次低成本、短周期、大开放、高效益的月球探测任务。
月球背面;地月L2点;着陆器;巡视器;中继星
0 引 言
由于月球的自转周期恰好等于其公转周期,因此月球有一面总是对地球不可见。人类历史上已经有多颗环绕探测器对月球背面进行了遥感探测,但从未有宇航员或探测器就位探测过这一片区域。
由于受到地球电离层的干扰,在地球上难以开展频率低于10 MHz的射电天文观测,在地球轨道甚至月球正面开展的空间射电天文观测也受到地球电离层反射和人工无线电的干扰,而月球背面屏蔽了人类活动产生的无线电干扰以及闪电、极光带来的无线电发射,因此被认为是开展低频射电天文观测的绝佳地点。利用月球背面独特的无线电环境,开展低频射电天文观测,将填补0.1~1 MHz频段的空白,有望在太阳风激波、日冕物质抛射和高能电子束的产生机理等方面取得原创性的成果,为未来对宇宙“黑暗时代”和“黎明时期”的探索打下基础。事实上,美国国家航空航天局(NASA)提出的DARE(Dark Age Radio Explorer)任务、DALI(Dark Ages Lunar Interferometer)月球背面超长波探测阵列设想,中欧联合提出的DSL(Discovering the Sky at the Longest Wavelengths)任务设想等都是瞄准这一重大科学问题[1-3]。
此外,月球背面保存了最古老的月壳岩石,其斜长岩高地可能形成于月球岩浆洋的分异结晶,这是月球形成的两大学说之一。对其开展形貌、物质组成、月壤和月表浅层结构的就位综合探测,有望获得月球最古老月壳的物质组成、斜长岩高地的月壤厚度等重要数据,取得对月球早期演化历史的新认识。
在“中国空间科学未来十年发展战略”和“美国行星科学十年规划”中,这些科学探测活动均被列为优先发展方向[4-5]。因此,利用月球背面这一极为特殊的位置资源,开展近距离现场探测,具有显著的工程意义和科学价值。但对于月球背面任务来说,探测器无法直接同地球通信,必须采用卫星中继的方式实现器地通信。
在20世纪60—70年代的第一轮探月高潮中,美国和苏联开展太空竞赛,实现了无人月球软着陆探测和载人登月,但这些探月任务的着陆点都位于月球正面。由于缺乏中继通信技术、工程实现难度大等原因,两国都没能实现月球背面软着陆。
进入21世纪以来,各国科研人员提出了多个月球背面软着陆探测方案。Jack O. Burns等提出了采用Orion多功能乘员舱在地月拉格朗日L2点遥操作着陆器/巡视器进行月球背面探测的任务方案[6]。文献[7]提出了一种采用着陆器、巡视器和地月L2点中继星进行月球背面探测的“嫦娥4号”任务设想。David Mimoun等提出了被称为“Farside Explorer”的“宇宙憧憬”中等规模任务,由两个着陆器和一颗中继卫星组成[8]。这一任务设想在参加欧洲航天局(ESA)2014年M4级任务方案征集时,缩减为一个着陆器和一颗中继卫星,名称则变为了FARSIDE任务[9]。
2014年以来,中国探月与航天工程中心组织成立了论证组,按照“效益最优、承上启下、创新引领、体现开放”的原则,综合权衡科学价值、社会效应、技术难度等多种因素,论证确定了“嫦娥4号”着陆月球背面并开展巡视勘察这一任务目标和相应的技术方案。目前,“嫦娥4号”任务处于方案设计与验证阶段,即将转入正样研制阶段。
1 任务总体设计
通过探月工程二期的实施,月球软着陆探测所需的基础设施、关键技术[10]以及探测器部分平台产品已经具备。经过深入论证和多方案反复比较,确定对已有的着陆器和巡视器进行适应性改进,并新增一颗中继星及一枚火箭,开展月球背面软着陆和巡视探测,实现工程技术和空间科学的双重跨越和创新。此外,为充分利用工程余量、提高工程展示度和整体效益,经充分论证,遴选确定了3个创新性强、综合效益高、可实现性强的搭载试验项目。
“嫦娥4号”的技术路线是:瞄准当今世界前沿,创新设计顶层任务,引领月球探测;充分继承成熟技术和产品并进行适应性改进,完善部分功能模块,通过集成创新,实现低成本、短周期、高效益的任务;通过开放资源引入高性能载荷和搭载项目,进一步提升工程综合效益,形成国际合作、国内开放的平台。
1.1 任务目标
“嫦娥4号”任务的工程目标为[11]:①实现人类首次月球背面软着陆和巡视勘察;②实现首次地月L2点中继星对地对月的测控、数传中继。
科学目标主要包括以下3个方面[11]:①月基低频射电天文观测与研究;②月球背面巡视区形貌和矿物组分探测与研究;③月球背面巡视区浅层结构探测与研究。
1.2 着陆区
遵循工程技术上可行、科学上有特色的原则,初步考虑将“嫦娥4号”的着陆区选为月球背面南极–艾特肯(South Pole-Aitken,SPA)盆地内的冯·卡门(Von Kármán)撞击坑内。SPA盆地被认为是太阳系内最大、最古老的撞击坑,保存了原始月壳的岩石,具有极高的科学研究价值。冯·卡门撞击坑位于SPA盆地的中部,直径约186 km,中心坐标为(44.8°S,175.9°E),如图 1所示。

图 1 月球背面的冯·卡门撞击坑Fig. 1 Von Kármán crater on the lunar farside
该撞击坑是SPA盆地中典型地貌类型,物质成分和地质年代具有明显的代表性。撞击坑内的钍、氧化铁、二氧化钛等含量均较高,且高程很低,同时物质组成的异常空间分布可能提供该地区火山活动以及月壳活动线索,有利于开展月壳活动研究,并对月幔玄武岩起源研究有重要意义。因此,冯·卡门撞击坑具有较高的科学探测价值,被认为是未来载人月球探测的候选着陆点之一[12]。
另一方面,冯·卡门撞击坑的南部地势相对较为平坦,从北往南着陆航迹上的高程起伏较小,且其纬度与“嫦娥3号”的虹湾着陆区相近,因此在着陆安全性、热控、光照、测控通信等方面具有较为有利的条件和较强的工程可实现性。
1.3 发射窗口
月球和深空探测任务对发射窗口的要求十分严格,一方面由于天体之间相对关系使得发射机会十分有限,另一方面发射窗口宽度的长短将影响探测器用于修正轨道的推进剂的用量的多少。
“嫦娥3号”任务要求实施发射的月份有连续3 d具备发射条件,每天两个相隔40 min以上的发射窗口,第一窗口宽度4 min,第二窗口宽度1 min[13]。
“嫦娥4号”任务在此基础上,进一步提升了发射场和运载火箭系统组织发射的能力,将每月连续3 d可发射的约束改为连续2 d可发射,为探测器轨道设计和推进剂携带量优化创造了有利条件。中继星和着巡组合体分2次发射,两次发射之间相隔约半年。
1.4 中继轨道
中继星轨道可采用环月轨道或地月L2点轨道。环月轨道的通信弧段短,会有连续若干天出现通信中断。地月L2点轨道是适合中继的理想地点,具有如下优点:①在此处地球和月球的引力之和使得中继星与月球同步绕地球运行,因此中继星能够连续对地球和对月球背面同时可见,提供全时段中继服务;②光照条件好,航天器很少被地球或月球遮挡;③此处受地球和月球的影响小,中继星长期运行所需轨道维持量较小。中继星与地球的可视性如图 2所示。经过比较分析,选择地月L2点轨道作为“嫦娥4号”中继星使命轨道。
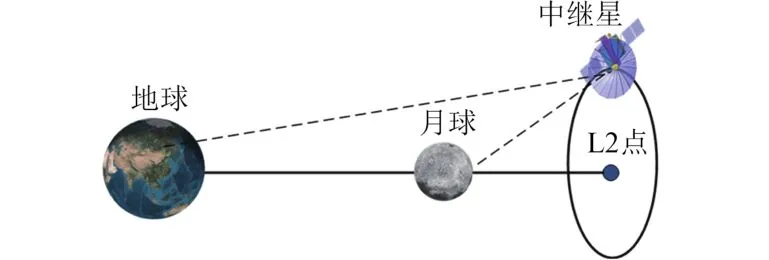
图 2 绕地月L2点运行的中继星和地球之间的可视性Fig. 2 The line-of-sight visibility between the Earth and relay satellite around the lunar L2 point
2 系统方案
“嫦娥4号”工程由探测器、运载火箭、发射场、测控、地面应用五大系统组成。
2.1 探测器系统
探测器系统由着陆器、巡视器和中继星组成。2.1.1 着陆器和巡视器
着陆器和巡视器基本继承了“嫦娥3号”的状态,并根据新的任务需求进行了适应性更改,主要包括:针对月球背面地形条件调整了着陆导航控制策略;针对中继通信的新需求更改了测控通信分系统软硬件,针对新的科学目标和国际合作需求调整了有效载荷配置。
特别地,为进一步深入认识月球特性,获取第一手工程参数,着陆器将开展月夜期间月壤温度测量。为此采用基于238Pu同位素热源(RHU)的同位素温差发电器(RTG),在月夜期间既可提供不小于2.5 W的电功率,还能提供大量热能用于舱内温度控制。
着巡组合体飞行状态构型如图 3所示,其发射质量约3 780 kg。着陆器设计寿命6个月,巡视器设计寿命3个月。

图 3 着巡组合体飞行状态构型Fig. 3 Flight configuration of relay satellite
2.1.2 中继星
中继星基于成熟的CAST100卫星平台研制。卫星本体为长方体构型,采用板式结构形式,顶部安装大口径的伞状抛物面天线,如图 4所示。
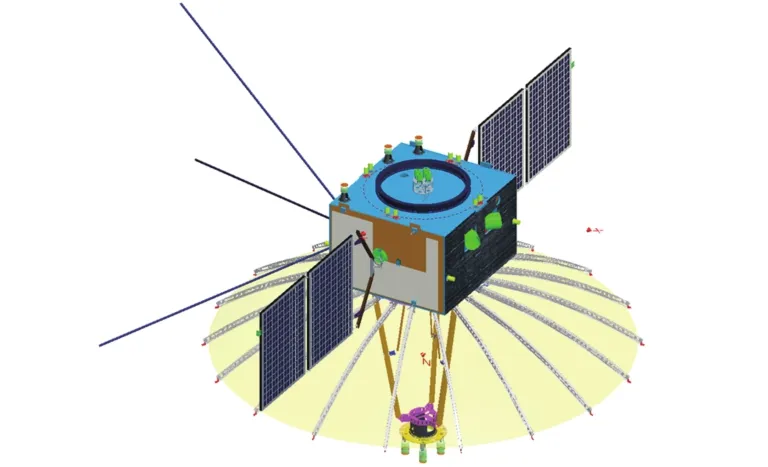
图 4 中继星工作状态构型Fig. 4 Working configuration of relay satellite
中继星采用“星敏感器+光纤陀螺”定姿方式和整星零动量控制方式,实现对地、对月、对日的三轴稳定控制。采用单组元推进系统,配置12个5 N发动机和4个20 N发动机,携带约100 kg无水肼推进剂,可提供超过500 m/s速度增量的轨道机动能力。采用三结砷化镓太阳电池阵和锂离子电池组为星上设备提供能源,采用半调节供电母线及分散式的配电体制。
中继星采用再生转发模式,对地测控数传与对月中继具备同时工作的能力。为避免发生干扰,对各通信链路频率进行兼容性设计。对地测控采用S频段统一载波体制,配置低增益螺旋天线。对月中继采用口径4.2 m的伞状抛物面天线,发射时收拢,入轨后展开,收发共用;其中前向链路采用X频段统一载波体制,返向链路采用X频段BPSK抑制载波体制,对着陆器的返向接收码速率最大为560 kbps,对巡视器的返向接收码速率最大为280 kbps。对地数传采用S频段BPSK抑制载波体制,配置中增益螺旋天线,码速率最大为2 000 kbps;在分时工作模式下,还可通过姿态机动利用对月通信的大口径抛物面天线实现X频段对地数据传输,码速率可达1万kbps。中继星通信链路如图 5所示。

图 5 中继星通信链路Fig. 5 Communication links of relay satellite
2.2 运载火箭系统
运载火箭系统包括两枚运载火箭。
采用“长征4号丙”(CZ-4C)运载火箭发射中继星,选用直径2 900 mm整流罩和直径937 mm卫星适配器。采用“长征3号乙”(CZ-3B)运载火箭发射着巡组合体,选用4000F型整流罩和直径1 750 mm接口有效载荷支架。
2.3 发射场系统
发射场均采用西昌卫星发射中心。其中,CZ-4C火箭将首次在西昌卫星发射中心执行发射任务,因此需对发射工位和推进剂加注系统等相关设施进行适应性改造。
2.4 测控系统
测控系统由运载火箭测控网、S频段航天测控网、深空测控网、VLBI测轨分系统等组成。其中深空测控网主要包括佳木斯66 m深空站、喀什35 m深空站和即将建成的阿根廷35 m深空站以及3座18 m测控站。
着巡组合体地月转移段、环月飞行段的测控和中继星的测控以深空测控网为主,辅以VLBI测轨分系统,测控覆盖率达到90%以上。
着巡组合体动力下降段和着陆器、巡视器月面工作期间,深空测控网通过中继星实现对月面着陆器和巡视器的遥控和数据接收。
2.5 地面应用系统
地面应用系统包括运行管理、数据接收、数据预处理、数据管理、科学应用与研究分系统。使用密云50 m、昆明40 m两个数据接收站并行工作,接收中继星的探测数据以及转发的着陆器、巡视器探测数据。针对新增的科学载荷,进行适应性修改。
3 科学载荷
针对“嫦娥4号”任务的三大科学目标和国际合作需求,探测器共配置了9台科学载荷,其中包括6台国内研制载荷和3台国际合作载荷,见表 1。
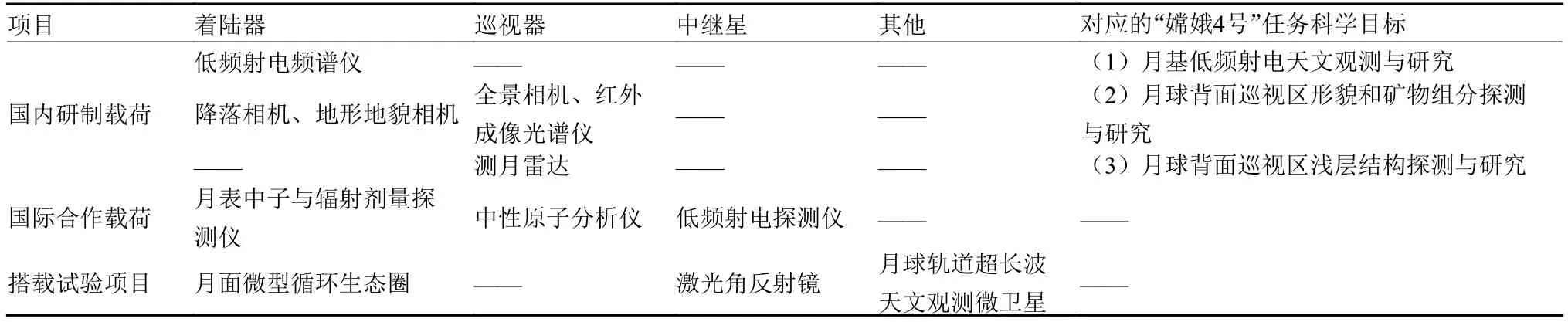
表 1 “嫦娥4号”探测器配置的科学载荷和搭载试验项目Table 1 Scientific payloads and test instruments on the Chang’e-4 probe
着陆器配置了4台科学载荷,包括国内研制的降落相机、地形地貌相机、低频射电频谱仪以及与德国合作的月表中子与辐射剂量探测仪。降落相机用于在着陆器降落过程中动态拍摄着陆区域的光学图像。地貌相机用于获取着陆区月表图像并监视巡视器月表移动。低频射电频谱仪用于探测0.1~40 MHz范围内的太阳低频射电特征和月表射电环境。月表中子与辐射剂量探测仪用于测量月表包括带电粒子、γ射线和中子的综合粒子辐射剂量及LET谱,测量月表快中子能谱和热中子通量,为未来载人登月安全活动和月表综合粒子辐射模型修正提供最新数据支持。
巡视器配置了4台科学载荷,包括国内研制的全景相机、红外成像光谱仪、测月雷达以及与瑞典合作的中性原子分析仪。全景相机用于获取巡视区的月表图像,红外成像光谱仪用于获取巡视探测点的月表光谱数据和几何图像数据,测月雷达用于探测巡视路线上的月壤厚度和月壳浅层结构。中性原子分析仪用于观测巡视探测点0.01~10 KeV能量范围内的能量中性原子及正离子,这将是国际首次在月表开展能量中性原子探测。
中继星配置了1台科学载荷,即与荷兰合作的低频射电探测仪,用于探测来自太阳系内天体和银河系的0.1~80 MHz低频射电辐射,为未来太阳系外的行星射电探测提供重要的参考依据。
4 搭载试验项目
“嫦娥4号”任务的搭载试验项目包括月球轨道超长波天文观测微卫星(以下简称微卫星)、月面微型生态圈科普载荷和月球中继激光测距项目,如表 1所示。
4.1 月球轨道超长波天文观测微卫星
利用CZ-4C运载火箭剩余发射能力,发射两颗微卫星,发射总质量为91 kg。两颗微卫星分别搭载一台超长波探测仪,在月球轨道进行深空编队飞行关键技术演示验证,开展超长波天文干涉测量,进行超长波全天空图像获取、射电频谱测量、太阳和系内行星超长波射电活动观测等探索性研究。其中一颗微卫星还搭载了一台沙特阿拉伯研制的微型光学相机,开展地月空间成像。微卫星发射状态和绕月编队工作状态构型分别如图 6和图 7所示。

图 6 微卫星发射状态构型Fig. 6 Launching configuration of micro satellite

图 7 微卫星绕月编队工作状态构型Fig. 7 Working configuration of circumlunar formation flying micro satellites
4.2 月面微型生态圈科普载荷
在着陆器上搭载重量为3 kg的月面微型生态圈,内含植物种子及昆虫卵,构成简单生态系统,验证在月面太阳自然光照条件下植物的光合作用原理,观测月面低重力条件下动植物的生长状况,积累构建太空生命保障系统的技术与经验,并向公众普及生物学知识。
微型生态圈搭载的生物物种暂定为马铃薯种子和家蚕卵。采用圈柱式结构,通过顶部10 mm直径的光导管将太阳光引入设备内部,提供植物生长所需能源;采用聚酯薄膜保温层和半导体冷热片,实现载荷内部温度控制;采用着陆器供电与锂硫特种电池,协同实现昼夜连续供电。通过内置摄像头对生物生长过程进行图像拍摄并传回地面。
4.3 月球中继激光测距
在中继星上搭载1.6 kg重的单体17 cm大孔径中空角锥反射镜(见图 8),配合地面0.5 m口径激光发射望远镜和1 m口径激光接收望远镜,进行月球和中继星之间的激光测距,预计单程测距误差优于15 mm。该项目将实现国际首次超过地月距离下的纯反射式激光测距实验,为“嫦娥4号”中继星提供轨道校验数据,并为未来月球激光测距科学实验和下一代月球激光反射器研制提供技术验证。
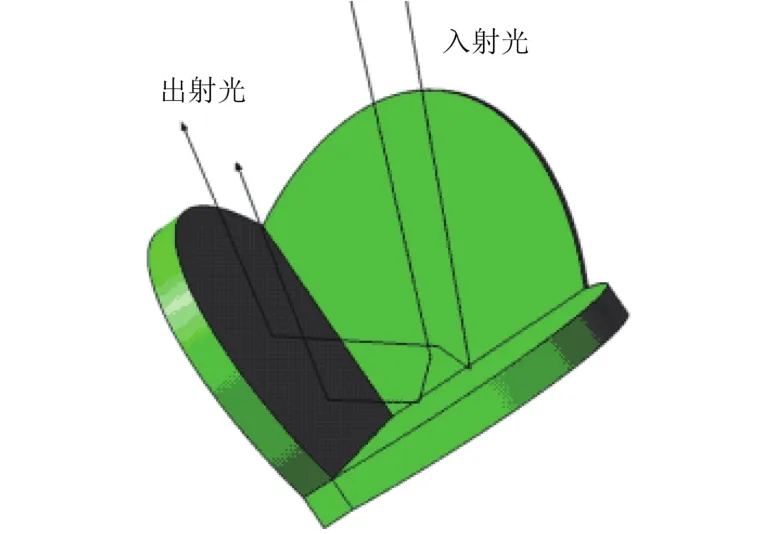
图 8 激光角发射镜Fig. 8 Laser corner retro-reflector
5 任务过程
中继星和微卫星将于2018年首先由CZ-4C运载火箭送入倾角28.5°、近地点高度200 km、远地点高度约40万 km的地月转移轨道,并相继实施星箭分离。
中继星与火箭分离后,在地面测控支持下,经中途修正,在近月点实施近月制动和月球借力,进入月球至地月L2点的转移轨道,经地月L2点捕获后,进入环绕地月L2点的使命轨道。使命轨道为Z向振幅约13 000 km、轨道平均周期约为14 d的南族Halo轨道。使命轨道运行期间,在测控和地面应用系统支持下,中继星实现月球背面的着陆器与地面站之间前向/返向的实时和延时测控数传中继。中继星飞行轨道如图 9所示。
微卫星经过地月转移阶段飞行,实施近月制动,进入300 km × 3 000 km的环月椭圆轨道。两颗微卫星进行编队飞行,开展基线长度为1~10 km、基线变化周期10 d的干涉测量。
当中继星在工作轨道上稳定运行一段时间后,着巡组合体由CZ-3B运载火箭送入倾角28.5°、近地点高度200 km、远地点高度约42万 km的地月转移轨道。着巡组合体在近月点实施制动,实现月球捕获,进入100 km环月圆轨道;在环月圆轨道运行期间,择机实施轨道机动,进入100 km × 15 km的椭圆轨道,并择机在近月点实施动力下降[15]。整个动力下降过程分为6个阶段:主减速段、快速调整段、接近段、悬停段、避障段、缓速下降段。

图 9 中继星飞行轨道Fig. 9 Flight trajectories of relay satellite
着巡组合体在月球背面冯·卡门撞击坑完成软着陆后,进行太阳翼展开并充电、定向天线展开并指向地球、推进剂钝化等一系列月面初始化工作。巡视器与着陆器配合完成巡视器解锁分离、转移释放、驶离等动作,巡视器到达月面。此后,在中继星的支持下,着陆器开展就位探测,巡视器按照任务整体规划逐个探测点进行科学探测,并把探测数据传回地面。
6 结 论
“嫦娥4号”着陆器和巡视器将于2018年前后在月球背面SPA盆地内的冯·卡门撞击坑着陆,有望实现人类首次月球背面软着陆和巡视勘察。在月球背面开展低频射电天文观测和形貌、矿物组分、浅层结构、中子及辐射剂量和能量中性原子探测,有望填补0.1~1 MHz频段射电天文观测的空白,取得对月球早期演化历史的新认识。中继星将实现首次在地月L2点的中继通信,开展低频射电天文观测和开展超过地月距离的纯反射式激光测距实验,为未来太阳系外行星射电探测和月球激光测距提供参考依据和技术验证。搭载的月球轨道超长波天文观测微卫星、月面微型循环生态圈和激光角反射镜,将进一步丰富人类的科学认知,扩大科学普及作用,提高工程的整体效益。“嫦娥4号”任务特点鲜明,预期成果显著,将是一次低成本、短周期、大开放、高效益的示范性空间探测任务。
[1]Burns J O,Lazio J,Bale S,et al. Probing the first stars and black holes in the early universe with the Dark Ages Radio Explorer (DARE)[J]. Advances in Space Research,2011,49(3):433-450.
[2]Lazio T J W,Burns J,Jones D,et al. The Dark Ages Lunar Interferometer (DALI) and the Radio Observatory for Lunar Sortie Science (ROLSS)[C]// Bulletin of the American Astronomical Society. USA:[s.n.],2007.
[3]Boonstra A J,Garrett M,Kruithof G,et al. Discovering the sky at the Longest Wavelengths (DSL)[C]// IEEE Aerospace Conference. [S.l.]:IEEE,2016:1-20.
[4]国家自然科学基金委员会,中国科学院. 未来10年中国科学发展战略:空间科学[M]. 北京:科学出版社,2012.
National Science Foundation of China,China Academy of Sciences. Space Science:Chinese disciplinary development strategy in the next 10 years[M]. Beijing:Science Press,2012.
[5]National Research Council,Committee on the Planetary Science Decadal Survey. Vision and Voyages for Planetary Science in the Decade 2013-2022[M]. Washington:National Academies Press,2011.
[6]Burns J O,Kring D A,Hopkins J B,et al. A lunar L2-Farside exploration and science mission concept with the Orion Multi-Purpose Crew Vehicle and a teleoperated lander/rover[J]. Advances in Space Research,2012,52(2):306-320.
[7]Wang Q,Liu J. A Chang’E-4 mission concept and Vision of future chinese lunar exploration activities[J]. Acta Astronautica,2016,127:678-683.
[8]Mimoun D,Wieczorek M A,Alkalai L,et al. Farside explorer:unique science from a mission to the farside of the moon[J]. Experimental Astronomy,2012,33(2):529-585.
[9]Wieczorek M. FARSIDE A mision to the farside of the Moon[R]. Call for a Medium-size mission opportunity in ESA’s Science Programme for a launch in 2025 (M4). [S. l.]:ESA,2014.
[10]于登云,吴学英,吴伟仁. 我国探月工程技术发展综述[J]. 深空探测学报,2016,3(4):307-314.
Yu D Y,Wu X Y,Wu W R. Review of technology development for Chinese Lunar Exploration Program [J]. Journal of Deep Space Exploration,2016,3(4):307-314.
[11]吴伟仁,于登云. 嫦娥三号月球软着陆工程中的关键技术[J]. 深空探测学报,2014,1(2):105-109.
Wu W R,Yu D Y. Key technologies in the Chang’e-3 soft-landing project[J]. Journal of Deep Space Exploration,2014,1(2):105-109.
[12]Snape J F,Fagan A L,Ennis M E,et al. Science-rich mission sites within South Pole-Aitken basin,Part 2:Von Kármán Crater[C]// Lunar and Planetary Science Conference. [S.l.]:Lunar and Planetary Science Conference,2010:1857.
[13]裴照宇,王琼,田耀四. 嫦娥工程技术发展路线[J]. 深空探测学报,2015,2(2):99-110.
Pei Z,Wang Q,Tian Y. Technology roadmap for Chang’E Program[J]. Journal of Deep Space Exploration,2015,2(2):99-110.
[14]Sun Z Z,Jia Y,Zhang H. Technological advancements and promotion roles of Chang’e-3 lunar probe mission[J]. Sci China Tech Sci,2013, 56:2702-2708.
通信地址:北京市西城区车公庄大街12号10层(100037)
电话:(010)88306176
E-mail:wuwr2002@vip.sina.com.cn
王琼(1983– ),男,博士,高级工程师,主要研究方向:月球与深空探测任务总体设计、星球巡视器任务规划、深空测控通信技术等。
通信地址:北京市西城区车公庄大街12号10层(100037)
电话:(010)88306151
E-mail:wangq2006@163.com
Design of Chang’e-4 Lunar Farside Soft-Landing Mission
WU Weiren,WANG Qiong*,TANG Yuhua,YU Guobin,LIU Jizhong,ZHANG Wei,NING Yuanming,LU Liangliang
(Lunar Exploration and Space Engineering Center,Beijing 100037,China)
The design of the Chang’E-4 lunar farside soft-landing mission is introduced in this paper. The landing area is initially selected as the Von Kármán crater inside the South Pole-Aitken basin on the lunar farside. A relay satellite is used to realize the lander and rover to the ground communication, and a Halo orbit around the second Earth-Moon Lagrangian point is chosen as its mission orbit. The relay satellite and the lander-rover combination are launched by a CZ-4C rocket and a CZ-3B rocket respectively. The lander, rover and relay satellite containing six domestic scientific payloads and three international scientific payloads, have carried out scientific exploration focusing on VLF radio astronomical observation, roving area topography survey, mineral composition and shallow structure investigation. In addition, two formation flying microsatellites on lunar orbit, lunar microecosphere and large-aperture laser angle reflector are launched to carry out ultra-long-wave astronomical interferometry test, lunar surface ecosystem test and laser ranging test over the Earth-Moon distance respectively. By innovatively designing the top-level tasks, adequately inheriting mature technology and products, adding the function module of relay communication, and opening some resources to introduce high-performance payloads and test projects, a low-cost, short-duration, great-openness and high-efficiency lunar exploration mission would be achieved.
lunar farside;Earth-Moon L2 point;lunar landers;rover;relay satellite
V41
A
2095-7777(2017)02-0111-07
10.15982/j.issn.2095-7777.2017.02.002
吴伟仁(1953– ),男,中国工程院院士,研究员,博士生导师,中国探月工程总设计师,主要研究方向:航天测控通信与航天系统总体设计。
[责任编辑:高莎,英文审校:朱鲁青]
吴伟仁,王琼,唐玉华,等. “嫦娥4号”月球背面软着陆任务设计[J]. 深空探测学报,2017,4(2):111-117.
Reference format: Wu W R,Wang Q,Tang Y H,et al. Design of Chang’e-4 lunar farside soft-landing mission [J]. Journal of Deep Space Exploration,2017,4(2):111-117.
2017-03-16
2017-04-10
国家中长期科技发展规划重大专项资助项目