基于滑移率的CVT夹紧力控制策略研究
2017-07-03袁晓红汪怡平
袁晓红,陈 龙,汪怡平
(武汉理工大学 现代汽车零部件技术湖北省重点实验室,湖北 武汉430070)
基于滑移率的CVT夹紧力控制策略研究
袁晓红,陈 龙,汪怡平
(武汉理工大学 现代汽车零部件技术湖北省重点实验室,湖北 武汉430070)
为了研究金属带式无级变速器的夹紧力控制问题,对传统的夹紧力控制策略进行改进.通过分析金属带与带轮的滑移机理,对滑移现象进行描述;研究滑移率对带轮传动的影响,并利用试验数据建立数学模型.利用AMESim和Simulink建立联合仿真模型,结合仿真结果对比新的控制策略与传统的控制策略.仿真结果表明:采用新的控制策略后,夹紧力降至原有的85%~90%;节气门开度从10%增加至50%的过程中,采用滑移控制的CVT的传动效率维持在80%~85%;在极限工况下,滑移率控制会产生一定程度的滑移率波动,需要进一步改善.
金属带式无级变速器;滑移率;夹紧力;传动效率;PID
0 引言
金属带式无级变速器(V-belt continuously variable transmission,CVT) 可以在较宽的范围内实现无级变速,获得传动系与发动机工况的最佳匹配,提高整车的燃油经济性[1],从而有效降低燃油消耗和排放,且驾驶舒适性好,因而在整车上的应用越来越广泛.然而CVT相对于机械变速器传动效率偏低[2],所以提高CVT传动效率成为推广CVT的关键.有研究表明,CVT在一定滑移率范围内,传动效率随着滑移率的增大而提高;超过一定滑移率后,传动效率会快速下降[3].如果能将滑移率控制在合理范围内,就可以在避免钢带过度磨损的情况下,提升传动效率.因此,笔者提出基于滑移率的夹紧力控制策略,并以传统控制策略为比较对象,进行多方面对比.
1 传统夹紧力控制理论及方法
CVT夹紧力控制是通过对从动缸压力的控制来实现的.由油门开度和行驶模式可以确定发动机输出转矩Te和目标速比i,则在发动机输出Te时,变速机构应能传递的最小转矩Tj为[4]
Tj=Tf+Te,
(1)
式中:Tj为安全转矩,N·m;Tf为转矩余量,N·m;Te为发动机输出转矩,N·m.引入转矩相对安全系数Sf,则此时变速机构应能传递的最小转矩Tj为
Tj=SfTe.
(2)
式中:Sf为安全系数,一般取1.3~2[5].由此可得从动带轮的夹紧力为[6]

(3)
式中:Fs为从动带轮的夹紧力,N;α为带轮锥角,rad;μbp为金属片与带轮间的摩擦系数;Rp为主动轮工作半径,m.
实时控制时,依据速比i和发动机转矩Te可以确定从动轮的夹紧力Fs,则从动缸压力为

(4)
式中:ps为从动缸压力,Pa;As为从动缸面积,m2.
夹紧力控制策略如图1所示[7].

图1 传统夹紧力控制策略Fig.1 Traditional clamping force control strategy
2 金属带与带轮滑移机理
滑移是变速器在传递转矩的过程中无法避免的一个现象,它主要由金属带和带轮之间的摩擦特性决定.相关研究表明,在几何速比、从动轮夹紧力、主动带轮工作半径、主动轮的转速一定的情况下,主动轮和从动轮与金属带之间的滑移随着变速器输入转矩的增加而增加.通常用滑移率S来描述打滑滑移的大小[8]

(5)
式中:S为滑移率;v为金属带的线速度,m/s;ω为带轮转速,rad/s;R为带轮工作半径,m.
CVT传递效率描述了金属带夹紧力与传递转矩之间的关系,其定义为[9]
ηt=ηωηT,
(6)
式中:ηt为总传递效率;ηω为转速传递效率;ηT为转矩传递效率.对传递效率进一步的分析可知,CVT的传递效率由从动缸压力决定.当从动缸压力过大时,则液压系统压力较大,导致较大的金属带转矩损失;当从动缸压力过小时,夹紧力不足导致金属带和带轮之间的速度损失较大.因此,合理控制金属带与带轮的滑移率及从动缸压力,可以提高变速器的传递效率.
3 最优滑移率控制策略
速比和滑移率是影响带轮与金属带之间摩擦系数的两个最重要的因素.滑移率与摩擦系数之间的关系,可以用以下的数学模型描述[10]:

(7)

图2所示为传动效率测试数据.由此可知,每个速比下都存在一个传动效率最高点,这个点所对应的滑移率就是该速比下的最优滑移率.由此建立最优滑移率与速比之间的关系,如图3所示.
滑移率控制系统根据速比i确定金属带与带轮的目标滑移率Sobj,与当前实际的滑移率Sreal进行比较,通过PID控制器得出当前所需要的夹紧力,进而将变速器的滑移率控制在最佳滑移率附近[11],滑移率控制策略如图4所示[12].
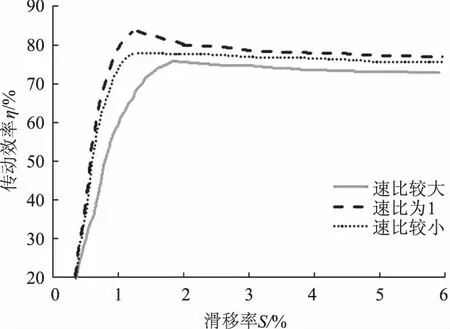
图2 滑移率与传动效率的关系Fig.2 Relationship between slip ratio and transmission efficiency

图3 最优滑移率Fig.3 Optimal slip ratio

图4 滑移率控制策略Fig.4 Slip ratio control strategy
在该控制策略下,当实际滑移率大于目标滑移率时,则适当加大从动轮夹紧力,使金属带与带轮间的滑移率减小;当实际滑移率小于目标滑移率时,则减小从动轮夹紧力,使滑移率增加,增加摩擦系数.
4 建模与仿真
利用AMESim和Simulink建立联合仿真模型.其中,在AMESim中建立变速机构模块、系统液压模块和整车模块,在Simulink中建立发动机模块、驾驶员输入模块和CVT控制模块[13],所建的模型如图5和图6所示.
在此模型中,驾驶员输入模块可以模拟多种简单工况,夹紧力和速比控制模块可以调整控制策略,以对比各个控制策略的优劣,方便了后续的研究.

图5 基于滑移率在AMESim中建立的仿真模型Fig.5 Simulation model built in AMESim based on slip ratio

图6 基于滑移率控制在Simulink中建立的仿真模型Fig.6 Simulation model built in Simulink based on slip ratio
5 滑移率控制策略与传统控制策略的比较
5.1 夹紧力
选取水平道路起步和紧急制动两种工况进行仿真,对滑移率控制策略和传统控制策略进行比较分析,结果如图7和图8所示.由仿真结果可知,滑移控制可以明显降低从动缸压力,减小夹紧力.同时应当注意,在紧急制动中,由于载荷迅速增加,想要避免出现过大的滑移,需要从动缸压力的迅速增加.

图7 起步工况下从动缸压力变化Fig.7 The pressure change of the driven cylinder under the starting condition
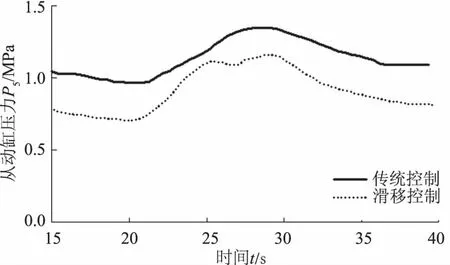
图8 紧急制动工况下从动缸压力变化Fig.8 The pressure change of the driven cylinder under the emergency braking condition
图9所示为紧急制动时的滑移率变化.可以看出,在紧急制动时出现了一个较大的滑移,滑移率峰值达到15%,在5 s内,滑移率迅速减小.这表明,在降低夹紧力后,CVT的抗扰动能力下降,在出现极限工况时,金属带和带轮会在短时间内出现一定磨损.因此,下一步应该调整控制策略,减小极限工况下的峰值滑移率,并使滑移率能在更短的时间内迅速下降,以提高控制系统的载荷适应能力.

图9 紧急制动工况下滑移率变化Fig.9 The slip rate change under emergency braking condition
5.2 传动效率
对比不同节气门开度的工况下的传动效率,对比结果如图10所示.

图10 各节气门开度下传动效率变化Fig.10 The change of drive efficiency under various sections of valve opening
如图10所示,在不同节气门开度下,采用滑移控制策略的传动效率较传统控制策略都有所提高.同时注意到,在节气门开度逐渐增大的过程中,采用滑移率控制策略的传动效率一直维持在80%至85%之间,较为稳定.而采用传动控制策略的传动效率则从65%至80%随节气门开度而逐渐提高.
6 硬件在环仿真试验
6.1 硬件在环仿真平台的搭建
笔者搭建的CVT硬件在环仿真平台如图11所示.其主要包括两部分:一是基于CVT台架试验的Simulink仿真模型;另一个是基于单片机设计的CVT控制器.

图11 硬件在环仿真平台Fig.11 Hardware in loop simulation platform
6.2 试验结果
分别测量不同车速下的百公里油耗,结果如图12所示.可以看出,基于滑移平的夹紧力控制能提升燃油经济性

图12 等速百公里油耗Fig.12 Constant speed fuel consumption per hundred kilometers
7 结论
基于夹紧力控制策略,通过AMESim和MATLAB/Simulink的联合仿真对比传统夹紧力控制策略和滑移率控制策略的优劣.仿真结果表明,基于滑移率的夹紧力控制策略能通过减小夹紧力来提升CVT的传动效率.硬件在环仿真试验表明,基于滑移率的夹紧力控制策略能有效地提升整车燃油经济性.同时,由降低夹紧力导致的CVT抗扰动能力的下降不容忽视.因此,基于滑移的夹紧力控制策略在现阶段也有其局限性,应该加强控制方法的载荷适应能力和工况适应能力.
[1] 程乃士.汽车金属带式无级变速器—CVT原理和设计[M]北京:机械工业出版社,2007.
[2] 刘开昌,吴云杰.封闭式锥盘无级变速器无循环功率条件及应用[J].郑州大学学报(工学版),2012,33(6): 84-87.
[3] 蔡源春.金属带式无级变速器燃油经济性及系统可靠性关键技术研究[D].长沙:湖南大学机械与运载工程学院,2011: 76-77.
[4] 程乃士,张德臻,刘温.金属带式车用无级变速器[J].中国机械工程,2000,11(12):1421-1423.
[5] 龚贤武,吴德军,高闯,等.混联型混合动力汽车建模及控制策略研究[J].郑州大学学报(工学版),2014,35(3): 73-77 .
[6] 杨凯.金属带式CVT夹紧力控制及液压控制系统的仿真分析[D].长沙:湖南大学机械工程学院,2012: 12-15.
[7] AKEHURST S,VAUGHAN N D,PARKER D A.Modeling of Loss mechanisms in a pushing metal V-belt continuously variable transmission-part2:torque losses due to band friction[J].Automobile engineering,2004,218: 1283-1293.
[8] BONSEN B.Performance optimization of the push-belt CVT by variator slip control[J].Int J of Vehicle Design,2005,39(3): 17-26.
[9] NILABH S,IMTIAZ H.Transient dynamics of the metal V-belt CVT:effects of pulley flexibility and friction characteristic[J].Journal of computational and nonlinear dynamics,2007,2(1): 1317-1326.
[10]AKEHURST S,VAUGHAN N D,PARKER D A.Modeling of loss mechanisms in a pushing metal V-belt continuously variable transmission-part1:torque losses due to band friction[J].Automobile engineering,2004,218: 1269-1281.
[11]CARBONE G,MANGIALARDI L,MANTRIOTA G.Theoretical model of metal V-belt drives during ratio changing speed[J].ASME journal of mechanical design,2000,123(1): 111-117.
[12]罗勇,孙冬野,秦大同,等.考虑CVT效率的无级变速车辆最佳经济性控制[J].机械工程学报,2010,46(4): 80-86.
[13]史天亮.基于AMESim捣固车作业走行系统仿真及改进[J].郑州大学学报(工学版),2013,34(5): 89-92.
Research on Clamping Force Control Strategy in CVT Based on Slip Ratio
YUAN Xiaohong, CHEN Long, WANG Yiping
(Hubei Key Laboratory of Advanced Technology for Automotive Components,Wuhan University of Technology,Wuhan 430070,China)
The clamping force control of continuously variable transmission was studied,and the traditional force control strategy was improved.The slip mechanism of metal belt and pulley was analyzed,with the description of the slip phenomenon.The influence of slip ratio on the belt wheel drive was studied,and the mathematical model was established by the test data.The combined simulation model based on AMESim and Simulink was established.Combined with simulation results,the new control strategy and the traditional control strategy are compared.The simulation results showed that the clamping force was reduced to the original 85%-90% with the new control strategy.The new control strategy made transmission efficiency maintained between 80% to 85%,with throttle opening increased from 10% to 50%.In extreme conditions,the slip rate control would produce a certain degree of slip rate fluctuations,which might need further improvement..
CVT;slip ratio;clamping force;transfer efficiency;PID
2016-06-10;
2016-08-23
国家自然科学基金资助项目(51305312)
袁晓红(1972— ),女,湖南汉寿人,武汉理工大学副教授,博士,主要从事汽车动力学研究,E-mail:yxh-hying@163.com.
1671-6833(2017)03-0082-05
U463.212
A
10.13705/j.issn.1671-6833.2016.06.013