真空开关低分散性永磁操动机构控制系统设计
2017-07-03陈占清袁端磊钟建英
程 显,陈占清,何 周,袁端磊,钟建英
(1.郑州大学 电气工程学院,河南 郑州 450001;2.平高集团有限公司,河南 平顶山 467000)
真空开关低分散性永磁操动机构控制系统设计
程 显1,2,陈占清1,何 周2,袁端磊2,钟建英2
(1.郑州大学 电气工程学院,河南 郑州 450001;2.平高集团有限公司,河南 平顶山 467000)
为抑制真空开关分闸、合闸操作引起的暂态影响,分析了真空开关分闸、合闸时的受力情况及对其操动精度的影响因素,仿真计算了永磁机构的动态特性;设计了一个自适应操动机构控制系统对真空开关操动机构的励磁电流、机构行程实时监测,通过驱动IGBT有序控制操动机构电容放电,有效修正其动作分散性;增加系统电压、电流相位检测单元后可实现设定相位准确动作.测试结果证明,控制系统可以明显降低真空开关操动机构的动作分散性,且操动机构分闸、合闸动作分散性控制在±500 μs以内.
真空开关;自适应控制;永磁机构;机构行程;励磁电流;动作分散性
0 引言
真空开关分闸、合闸瞬间系统电压和电流相位通常是随机的,当其分合并联电容器组、电抗器、空载变压器以及空载线路时常会产生幅值、频率很高的涌流和过电压[1-2].这些过电压波形给开关和其他一次设备的绝缘寿命带来不良影响,也影响电能质量和系统可靠性[3-5].若真空开关在有利的系统电压或电流相位动作,则操作对系统及其他一次设备的影响将降到最低,同时也可提高真空开关在复杂条件下开断短路电流的能力,而能否在有利相位完成分闸、合闸动作,主要由真空开关操动机构的动作分散性决定[6-9].
低分散性断路器技术在国外已有三十多年的研究历史,目前已大量应用于并联电容器组、空载变压器和电抗器等负荷的正常投切,然而国内该技术的研究应用仍处于探索阶段,并未批量用于抑制电网操作过电压.目前,国内多家研究单位针对该技术的控制实现方案、控制策略等开展相关研究,以期开发出可进行工程推广的实用技术产品[10-12].
笔者在归纳影响真空开关分闸、合闸精度因素的基础上分析永磁机构的动态特性;采用高速采样技术、PWM驱动技术和自适应控制技术,设计一种可实现操动机构低分散性的永磁操动机构控制系统,其可应用于10 kV、35 kV电压等级的真空开关.
1 操动机构选型与动态特性分析
在合适的系统电压或电流相位进行分闸、合闸操作可在一定程度上提高真空开关的动作成功率,这对真空开关机械特性提出较高需求;三相独立动作还对操动机构体积提出了小型化要求;真空断口承受电压与真空间隙长度成正比,若操动速度低,真空间隙将发生重击穿,这要求操动机构的动作速度较高;同时考虑到便于控制方案实施,还对其受外界因素影响的参量多少进行了限制.
综合各种因素,最终选取单线圈永磁机构为操动机构.永磁机构通过励磁线圈驱动,励磁线圈的电压、电流值仅需通过控制电解电容器容量、充电电压和精确放电调节.温度变化对操动机构性能影响、真空开关触头弹跳及触头的磨损老化也都是设计低分散性操动机构时需重点考虑的问题.设计中永磁机构与真空开关相连实现开断,要求合闸速度为0.7 m/s,分闸速度为1.7 m/s.
1.1 永磁机构动态特性数学模型
电容对永磁机构线圈放电励磁的过程是一动态能量转换过程,该过程数学模型可构建如下:
(1)
(2)
(3)
(4)
ψ(t0)=ψ(t0),v(t0)=0,x(t0)=0,Uc(0)=U.
(5)
式中,v(t)为动铁芯运动速度;x(t)为动铁芯位移;F(t)、Ff(t)为动铁芯所受电磁吸力和系统反力;m为归算到动铁芯的质量;ψ为线圈耦合磁链.其中,ζ=0时为机构触动过程,ζ=1时为机构运动过程.
1.2 合闸过程动态特性
基于上述模型运用matlab及相关软件对永磁操动机构运动过程的受力、合闸速度、位移及电源电压、励磁电流进行仿真计算,如图1所示.图1(a)为合闸受力曲线,其中真空泡反力包括分闸簧、触头压力簧压力及断路器自闭力,电磁吸力大于真空泡反力时触头开始合闸动作.随着合力的变化,动铁芯在合闸初期迅速加速,即将到达合闸位置时急剧减速,避免触头弹跳.图1(b)为合闸速度和位移曲线,合闸速度约为2 m/s,高于要求合闸速度0.7 m/s(刚合点前6 mm内平均速度),提供了合闸调速区间.由图1(c)中电容电压变化曲线可知,单次合闸操作电容电压下降约30 V,能量消耗较小,可进行多次操作.
1.3 分闸过程动态特性
永磁机构分闸过程的动态特性如图2所示.图2(a)的分闸受力曲线中,真空泡反力包括触头弹簧压力和自闭力.由图2(b)可计算出分闸速度约为2.6 m/s,大于要求分闸速度1.7 m/s,有分闸调速空间.单次分闸操作电容电压最大下降25 V,电容剩余能量可完成下次合闸操作.
经以上仿真分析可知,永磁操动机构动态分合闸过程中的机械特性、电气特性满足低分散性真空开关的实际设计要求.
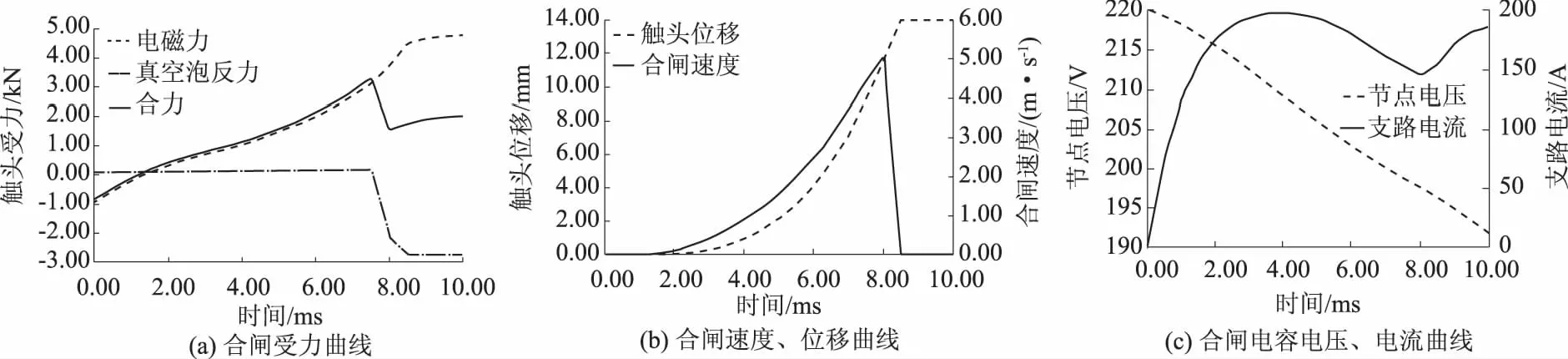
图1 永磁机构合闸运动特性Fig.1 Motion characteristics of permanent magnetic actuator’s closing

图2 永磁机构分闸运动特性Fig.2 Motion characteristics of permanent magnetic actuator’s opening
2 操动机构控制系统设计
2.1 控制系统整体方案
期望在理想相位进行准确操动,需要解决两个问题:一是系统的电压、电流波形相位的准确判断,这可以通过采样、滤波、信号调理电路和过零点检测算法并结合操动机构行程总时间实现;二是确保操动机构动作的低分散性.操动机构动作精度受环境温度、机构磨损程度、线圈阻值和机构偏心度等因素影响,这一过程计算繁琐且无法准确计算,但其造成的影响必然在机构行程和励磁电流参数上反映出来,因此系统设计中不直接考虑上述复杂的物理模型和补偿算法,而是通过大量实验得出多种复杂环境下操动机构行程的典型理想曲线(包括励磁电流曲线和行程曲线),将实际操动过程中机构行程和励磁电流参数分别与内置控制系统的理想曲线实时比对,并通过计算及比例调用对励磁线圈电压、电流进行实时调节,精确控制机构行程,实现行程调节降低操动机构动作分散性的功能.通过高速采样技术、并行处理技术、高速计算技术和脉冲驱动技术可解决上述两点问题.依据以上控制原理分析,设计的真空开关操动机构控制系统的整体原理图如图3所示,其主要包括系统电压、电流波形的信号采集单元;进行低分散性控制的驱动与调速单元;对上述两部分信号并行采样和高速计算的数据处理单元.下面将对驱动与调速单元进行说明.
2.2 操动机构驱动与调速单元设计
操动机构驱动与调速单元主要由信号采集部分、逻辑控制部分、励磁电流驱动部分及操动电源部分构成.信号采集部分负责实时采集操动机构励磁电流和触头位置信息;逻辑控制部分基于PWM技术建立闭环控制,通过对比操动机构实际状态量和操动机构理想位移曲线及理想励磁电流曲线,同步调整相应的控制信号;励磁电流驱动部分负责完成永磁机构的励磁电流控制,如图4所示.上述操动所需电源由电解电容提供.
接收到分、合闸操作指令时,主控芯片发出控制信号并通过光耦驱动芯片HCPL-316J对4个IGBT置相应逻辑电平控制IGBT的导通和关断,控制电容器对励磁线圈放电的时间、次序,实现准确控制励磁线圈电流大小补偿操动机构位移偏差,修正各种环境因素变化引起的操动机构动作时间分散问题,确保永磁机构基本按照理想行程曲线运动.IGBT Q1、Q4导通,Q2、Q3关断时,真空开关进行合闸操作;控制Q2、Q3导通,Q1、Q4关断时,真空开关分闸.需要注意的是不能使同一桥臂中上下两个IGBT同时导通,以免造成电解电容短路.图5为IGBT模块控制电路图.
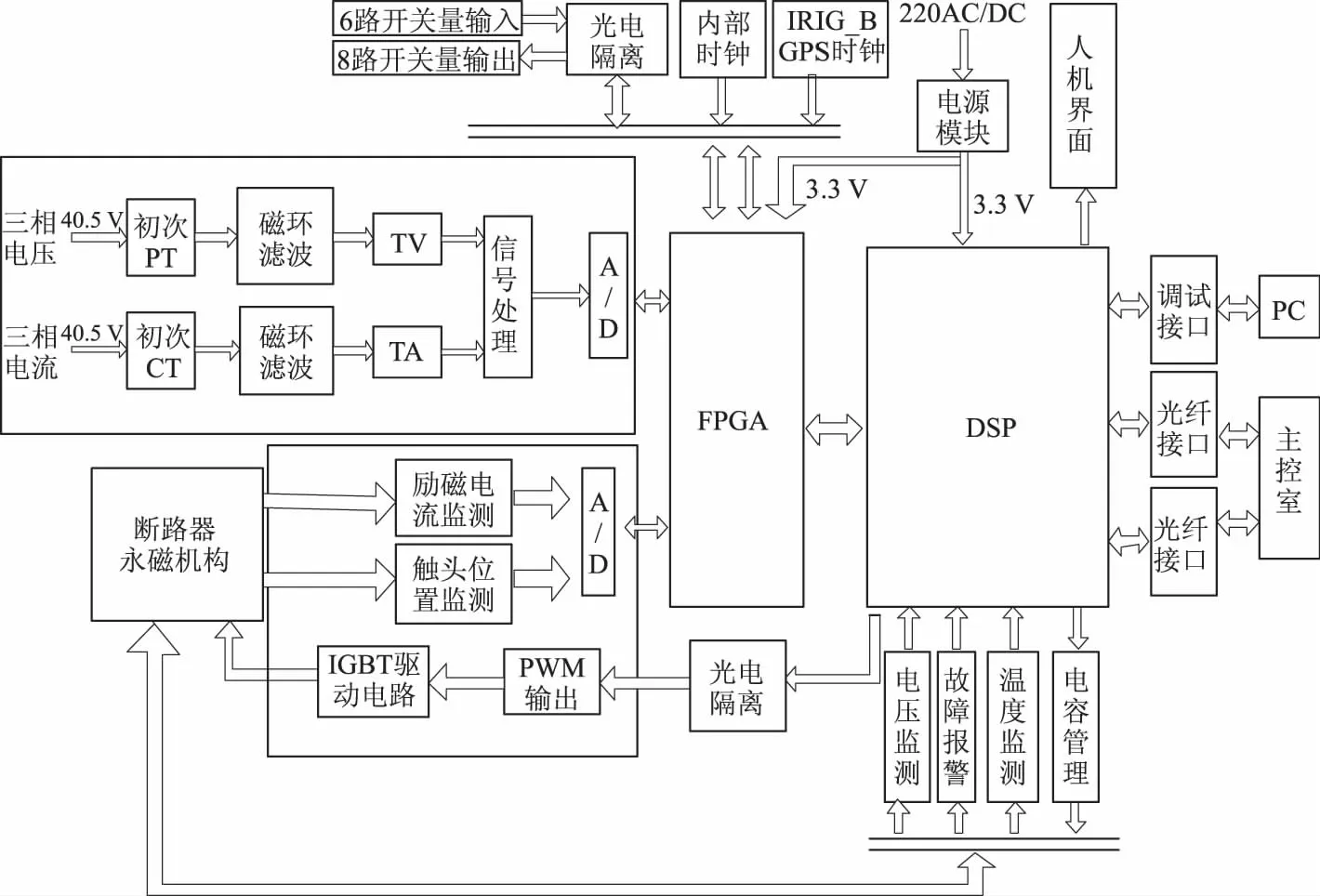
图3 操动机构控制系统原理图Fig.3 Schematic diagram of control system of actuator
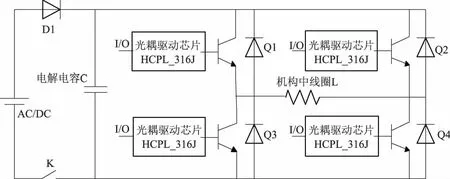
图4 IGBT驱动电路图Fig.4 IGBT driving circuit diagram
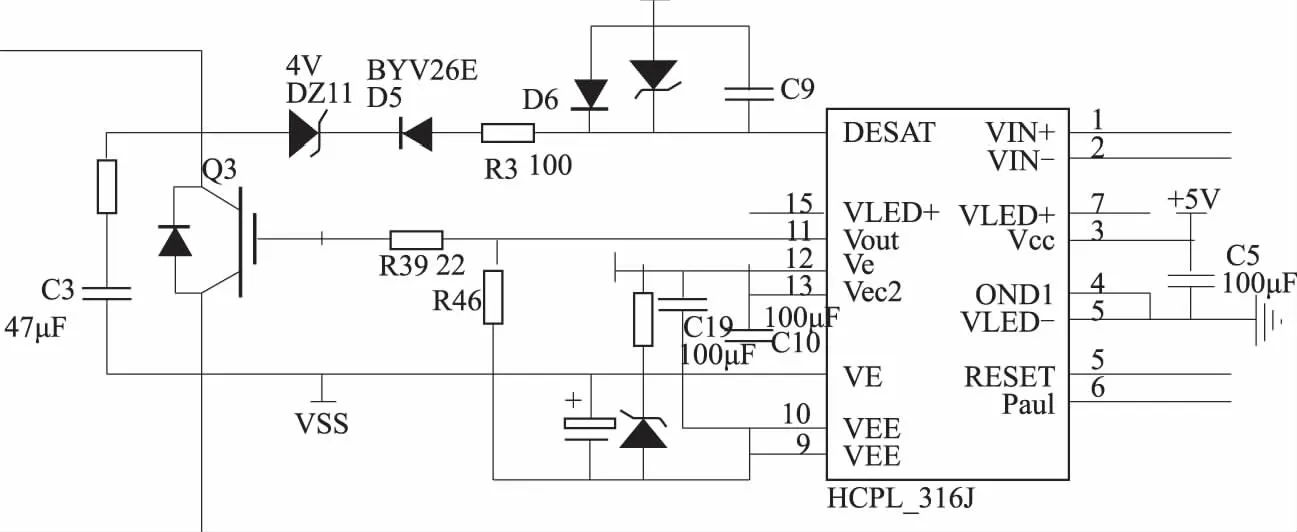
图5 IGBT模块控制电路Fig.5 Control circuit of IGBT module
3 操动机构控制系统性能测试
为验证控制系统性能,将其与行程13 mm的永磁机构配合安装在10 kV真空开关上进行测试.试验以电容充电电压220 V,PWM频率4 kHz,占空比50%时触头运动轨迹作为参考,测试不同电容电压、环境温度和闲置时间等因素影响下操动机构动作时间和动作分散性.
(1)设定电容初始电压变化范围200~240 V,每个测试电压下进行30次分、合闸测试.不同电容电压下真空开关触头合闸时间统计特性如图6(a)所示.采用低分散性控制系统时触头合闸时间分散性<0.1 ms,电容电压变化对动作时间的影响很小,约为0.004 ms/V;合闸弹跳时间<0.5 ms,可减弱因合闸弹跳引起的触头烧蚀影响.
(2)根据IEC62271—302同步开关标准对样机进行闲置时间影响测试,测试结果见图6(b).通过低分散性控制系统修正,操动机构闲置168 h时合闸时间标准差<0.1 ms,开关合闸动作时间均值为45.57 ms,闲置时间带来的影响明显降低.
(3)环境温度影响测试结果如图6(c).外界环境温度变化对操动机构动作时间的影响通过行程自适应单元补偿得到有效调整,开关合闸时间受环境温度影响变化<0.1 ms.

图6 平均合闸时间统计特性Fig.6 Statistical characteristics of closing time under different temperature, capacitor voltage, and idle time.
文献[7]采用改进型滞环控制方法优化真空触头运动特性,其试验结果表明,不同电容电压下触头动态合闸误差绝对值≤0.3 ms;文献[8]利用双闭环控制系统调控真空触头动作,控制合闸误差在±0.3 ms内.对比试验结果可知,笔者设计的低分散性控制系统可控制真空开关合闸时间分散性<0.1 ms,具有一定的优势.
笔者针对低分散性真空开关永磁操动机构控制系统进行了电磁兼容性试验和分合闸速度及时间、动作分散性参数测试.试验结果表明,系统抗电磁干扰能力强,按受试设备运行条件和功能规范分类,EMC实验均符合a类标准;分闸、合闸速度分别为(1.7±0.2) m/s、(0.7±0.2) m/s,操动机构的分合闸精度在±500 μs.
4 结论
(1)研制了一种低分散性真空开关永磁操动机构控制系统,通过对真空开关操动机构励磁电流、机构行程实时监测,并驱动IGBT有序控制操动机构电容放电,能有效消除电源电压、闲置时间、外界温度和机构磨损等因素变化对操动分散性的影响,实现修正其动作分散性,增加系统电压、电流相位检测单元后可实现选相控制.
(2)测试试验证明,储能电容范围200~240 V时操动机构合闸弹跳时间<0.5 ms;操动机构闲置168 h时合闸时间标准差<0.1 ms;温度在零下10~55 ℃变化时开关动作受温度影响变化<0.1 ms.控制系统抗电磁干扰能力强,EMC实验均符合a类标准;分闸、合闸速度分别为(1.7±0.2) m/s、(0.7±0.2) m/s,操动机构的分合闸精度在±500 μs.
[1] 陈明帆,段雄英,黄智慧,等.真空开关动作时间的自适应控制[J].中国电机工程学报, 2010, 30(35): 22-26.
[2] DELFINO B, FOMARI F, GEMME C. Power quality improvement in transmission and distribution networks via synchronous switching[C]//Proceeding of the IEEE Power and Engineering Society Transmission and Distribution Conference.Atlanta,GA: IEEE Press, 2001: 367-372.
[3] 林莘,曹辰,李斌,等.永磁机构真空断路器的动态特性仿真及分闸弹跳分析[J]. 高电压技术, 2013, 39(7): 1772-1777.
[4] 舒胜文,阮江军,黄道春,等.相控真空断路器的最佳燃弧区间研究[J]. 高压电器, 2012, 48(8): 1-6.
[5] 程显,廖敏夫,段雄英,等.双断口真空开关瞬态恢复电压分布特性的仿真与实验研究[J].中国电机工程学报, 2012, 32(1): 171-178.
[6] 朱晓东,刘冲,郭雅默.基于烟花算法与差分算法的模糊分类系统设计[J]. 郑州大学学报(工学版), 2015, 36(6): 47-51.
[7] 吕锦柏,王毅,常广,等.优化的真空断路器合闸控制方法[J]. 高电压技术, 2013, 39(11): 2836-2844.
[8] 汤庚,徐建源,林莘,等.基于双信号检测及跟踪的真空断路器永磁机构控制方法研究[J]. 高压电器, 2013, 49(12): 1-6.
[9] 焦留成,姚涛.基于能量成型的永磁同步直线电机控制研究[J]. 郑州大学学报(工学版), 2015, 36(3): 1-5.
[10]苏宗海,韩爱芝,武建文,等.同步真空断路器投切电容器组装置的精度研究[J].高压电器,2014, 50(7):31-37.
[11]RIOUAL M, DIGARD H, MARTIN C, et al. Field application of a synchronous controller based on measurement of residual fluxes for the energization of a set-up transformer[C]//IEEE Power and Energy Society General Meeting. San Diego,CA: IEEE Press, 2011: 1-8.
[12]赵艺杰,贠保记,郑飞,等.基于最小二乘法的永磁断路器同步关合控制的研究[J].高压电器, 2014, 50(6): 61-64.
Design of the Low-dispersion Control System for the Permanent Magnetic Actuator of Vacuum Switch
CHENG Xian1,2, CHEN Zhanqing1, HE Zhou2, YUAN Duanlei2, ZHONG Jianying2
(1.School of Electrical Engineering, Zhengzhou University, Zhengzhou 450001, China; 2.Ping Gao Group Co., Ltd., Pingdingshan 467000, China)
To decrease the transient influence caused by the switching operation of vacuum switches, the resultant force on vacuum switch in the operating period and the influence factors on operating accuracy were analyzed in this paper. Dynamic characteristics of permanent magnetic actuator in the operating processes were calculated. A self-adaptive control system for actuator, which could real-time control the excitation current and travel agency of actuator, was designed. The control system could modify action dispersion of the actuator effectively by driving IGBT to control the discharging orders of capacitors. It could also realize accurate operating at setting voltage and current phases by adding phase detection unit. Test results of the control system showed that the control system could reduce the action dispersion of vacuum switch actuator significantly, and the action dispersion was controlled within ±500 μs.
vacuum switch; self-adaptive control; permanent magnetic actuator; mechanism travel; excitation current; action dispersion
2016-06-22;
2016-10-18
国家自然科学基金资助项目(51407163;51477024),中国博士后科学基金资助项目(2014M552012; 2015T80778)
程显(1982—),男,河南郑州人,郑州大学副教授,博士,主要从事高压智能电器和高电压新技术研究,E-mail: chengxian@zzu.edu.cn.
1671-6833(2017)03-0058-05
TM501;TM561
A
10.13705/j.issn.1671-6833.2016.03.033
