基于跟踪微分器的CMG框架超低速测速方法研究
2017-07-03宿诺鲁明翟百臣胡跃伟
宿诺,鲁明,翟百臣,胡跃伟
北京控制工程研究所,北京 100190
基于跟踪微分器的CMG框架超低速测速方法研究
宿诺,鲁明*,翟百臣,胡跃伟
北京控制工程研究所,北京 100190
超低转速下,框架的测速精度是影响控制力矩陀螺框架系统控制精度的重要因素。针对超低转速下使用传统一阶后向差分方法计算转速会导致噪声放大的问题,给出了一种基于非线性跟踪微分器的实时速度估计方法,以及该方法基于四阶龙格库塔法的离散表达公式。提出了一种复合的测速策略,解决了直接使用跟踪微分器计算转速的跟踪延迟问题。进行了数值仿真分析和试验验证,仿真结果表明,所提出的测速方法有效降低了传感器输出的量化噪声和测量噪声对速度测量精度的影响;试验测试结果统计表明,相比传统的后向差分法,采用跟踪微分器计算转速,框架速度的波动量减小了67.1%。
控制力矩陀螺;框架;永磁同步电机;超低转速;跟踪微分器
控制力矩陀螺是应用在航天器上一类重要的执行机构。由于控制力矩陀螺具有力矩放大的特性,可用小的质量、功耗输出大的力矩,并且动态响应迅速,输出力矩精度较高,使其在航天控制领域特别是大型卫星平台或空间站上得到了较为广泛的应用。中国的“天宫二号”空间试验室即使用控制力矩陀螺作为姿态控制执行机构,要求控制力矩陀螺具有较高的控制精度和稳定度,“天宫”控制力矩陀螺一般工作在低速状态,因此如何提高其在低速下的控制性能是当前研究的重点和难点。
控制力矩陀螺所输出的控制力矩Tout=Hs×ω,其中Hs为转子高速旋转产生的角动量,ω为框架转速。可见,控制力矩陀螺输出力矩的精度受到框架转速控制精度的影响。目前对影响框架转速控制精度因素的研究主要集中在框架干扰力矩的影响及控制方法的性能上[1-2],实际上当框架超低速旋转时,测速精度成为影响框架转速控制的又一个重要因素。目前,框架电机测速常用的方法是通过光栅、旋转变压器等位置传感器获得电机的位置信号,然后对位置信号进行一阶后向差分得到转速。然而位置传感器得到的信号是量化的信号,并且含有测量噪声,对其进行差分将会放大量化噪声和测量噪声的影响[3],尤其是在电机超低速转动的情况下,电机的实际转速将被噪声信号所淹没[4]。为提高框架超低转速下的测速精度,目前已提出多种速度测量及估计方法。文献[5]提出了一种基于多周期后向差分的转速计算方法,有效提高了电机转速测量分辨率,提高了框架伺服系统的控制精度;文献[6]采用扩展卡尔曼滤波算法(EKF)计算转速的最优估计值,但是计算量太大,不利于实时控制。此外,目前提出了多种无速度传感器的方法用来测量电机转速,文献[7-8]提出了一种基于模型参考自适应(MRAS)的电机转速观测方法;文献[9]提出了一种基于Luenberger的速度观测器,利用电机的定子电压和电流信号观测出电机的转速值。但是文献[6-9]中所提出的方法都需要知道准确的电机模型,而实际情况下准确的电机模型难以获得。
本文提出了一种基于非线性跟踪微分器的电机转速估计方法,依据积分运算能削弱噪声影响的特性,在计算过程中只涉及数值积分运算而不需要对量化的位置信号进行差分,避免了差分运算对量化噪声和测量噪声的放大问题。在“天宫”控制力矩陀螺产品上进行了试验验证,试验结果表明该方法的引入可以提高控制力矩陀螺框架在低速下的控制精度,有利于“天宫”目标飞行器姿态控制性能的进一步提升。本文所提的方法不仅可以应用在控制力矩陀螺框架伺服系统的速度测量中,在其他应用光栅、旋转变压器等进行低速测量的场合如转台[10]、车床[11]等,此方法同样适用。
1 基于跟踪微分器的转速估计方法
1.1 跟踪微分器原理
非线性跟踪微分器这一概念最早由韩京清于1994年提出[12-13],该算法利用了数值积分在处理带噪声信号时优于数值微分这一事实[14],设计跟踪器将信号的微分问题转化为对一组微分方程的数值积分,克服了传统的差分法计算微分的缺点[15-16]。跟踪微分器自提出至今已经衍化出了多种形式,下面给出一种高稳快速跟踪微分器:
(1)
对于式(1)描述的跟踪微分器,如果R,a,b>0,m为奇数,且m>2,那么对于任何输入信号r(t),满足:
(2)
选择合适的参数,使系统渐进稳定,则系统状态x1(t)平均收敛于输入信号r(t),x2(t)弱收敛于r(t)的导数,即状态x1,x2分别跟踪输入信号及其微分[17]。由于x1,x2的值可通过数值积分的办法得到,而不用对位置传感器输出的量化带噪声的信号进行差分运算,可以削弱噪声的影响。
式(1)描述了跟踪微分器的连续形式,需要对其进行离散化处理后才能在实际系统中使用,利用欧拉法对式(1)所示的跟踪微分器进行离散化的递推公式:
x1(i+1)=x1(i)+h·x2(i),
(3)
式中:h为积分步长,ε(i)=x1(i)-r(i),为输入变量r的估计误差。为了提高计算的精度,本文采用具有更高精度的四阶龙格库塔进行数值积分运算,利用四阶龙格库塔法进行离散化的递推公式如下:
(4)
其中:
(5)
式中:
(6)
对比欧拉法和四阶龙格库塔法的计算公式可以看出,四阶龙格库塔法需要4次计算函数f1(x)和f2(x)的值,但是由式(6)可知f1(x)和f2(x)的形式简单,实际上对于高速处理器只增加了约50 μs的计算时间,因此使用四阶龙格库塔法可以在付出较小计算代价的情况下提高计算精度。
1.2 仿真分析
在MATLAB的SIMULINK环境下,仿真建立了基于矢量控制的永磁同步电机控制系统。仿真中所用的电机参数如表1所示。
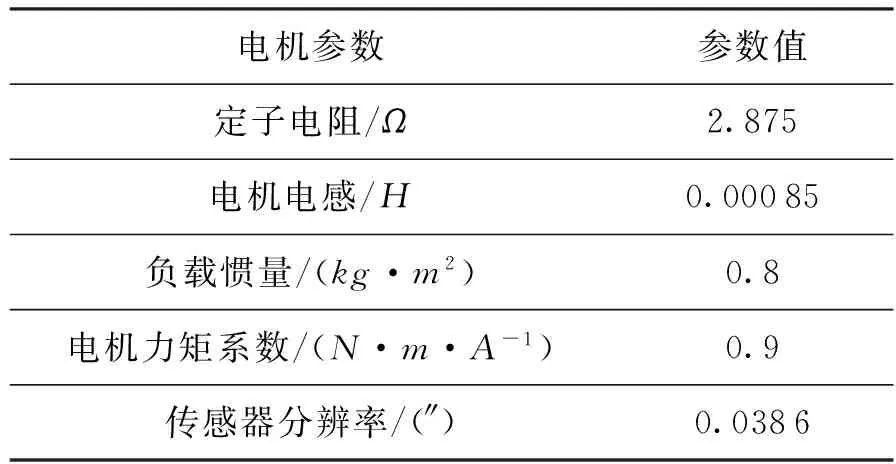
表1 电机参数
框架闭环控制系统的结构如图1所示。包括电机模块、坐标变换模块、矢量控制模块、测量模块和速度计算模块,其中速度计算模块的性能对整个闭环控制系统的精度和稳定度都有重要的影响。
在给定转速0.01(°)/s的情况下,分别使用后向差分法和跟踪微分器计算电机转速,仿真结果如图2、图3所示。
图中,ωm为仿真中的真实框架转速,在实际系统中不可测量;图2中的ωk为采用后向差分法计算得到的框架转速,图3中的ωd为采用跟踪微分器计算得到框架转速,ωk和ωd在实际系统中可测。由图2的仿真结果可见,在给定框架转速0.01(°)/s时,采用后向差分法计算得到的转速值ωk在0.007 2(°)/s和0.010 8(°)/s之间跳变,这是因为仿真实例中使用25位光栅的框架转速分辨率为0.003 6(°)/s,所以系统稳定时测得的框架转速在0.007 2(°)/s和0.010 8(°)/s之间波动,波动幅值为0.003 6(°)/s。由图3的仿真结果可知,使用跟踪微分器进行速度测量,系统稳定时框架转速的波动幅值约为0.000 8(°)/s,小于使用后向差分法进行测速的框架转速波动幅值。
1.3 复合的测速策略
对比图2、图3的仿真曲线可以看出,使用跟踪微分器测得的转速值ωd的波动量明显小于使用后向差分法测得的转速值ωk的波动量。但是与实际转速ωm相比,由跟踪微分器计算得到的转速值在框架升速过程中存在跟踪延迟现象,这是因为跟踪微分器算法的具体实现是一个迭代收敛的过程,需要一个收敛时间来跟踪快速变化的转速,从而导致框架升速过程中的跟踪延迟,而跟踪延迟不利于系统的闭环控制。为了避免跟踪延迟,在框架升速过程中,利用差分法跟踪速度快的特点,使用由后向差分法计算得到的转速值进行闭环控制,而当框架速度趋于稳定时,使用由跟踪微分器计算的转速值进行闭环控制,这样既能避免跟踪延迟现象,又能保证控制系统稳态过程的平稳性。具体实现过程为,在升速时对框架转速进行采样,如果连续n个采样时刻的框架转速在给定转速值的上下10%范围以内波动:
(7)
即认为框架转速已经到达稳态,开始使用跟踪微分器计算的转速值进行闭环控制。切换测速方法的结构图如图4所示。
仿真结果如图5所示,由仿真结果可以看出,在给定框架转速0.01(°)/s的情况下,当框架转速达到稳定时,使用跟踪微分器方法测速框架转速的波动量明显小于使用传统后向差分方法测速时框架转速的波动量。
2 试验验证
为验证所提方法的正确性,在控制力矩陀螺原理样机上进行了试验研究,试验用的CMG样机如图6所示。框架电机采用的是永磁同步电机,采取电机直接驱动框架的方式,将框架伺服系统设定在了速度环,对永磁同步电机采用id=0的矢量控制方法,闭环系统的控制周期为500 μs,速度采样周期为750 μs。框架的位置信息由位置传感器得到,试验中的角位置传感器采用25位光栅,其测角分辨率为0.038 6″,为对比框架超低转速下的控制性能,试验时给定框架转速值为0.01(°)/s,跟踪微分器的参数a=5,b=5,m=3,R=100,四阶龙格库塔法进行离散化的积分步长h=750 μs。分别采用后向差分法和跟踪微分器法对光栅输出的角位置信号进行处理,得到框架的转速值并引入闭环控制系统,试验测试结果如图7、图8所示。
试验结果表明:采用后向差分法时,框架转速的波动量较大,而采用本文所提出的跟踪微分器法测速,框架转速的波动量明显小于前者。统计测得的试验数据得:采用后向差分法的框架转速波动方差为4.847(″)/s,采用跟踪微分器的框架转速波动方差为1.594(″)/s,波动量减小了67.1%,可见:跟踪微分器的使用提高了框架超低速时的测速精度,进而提高了框架伺服系统超低转速下的控制精度。
3 结束语
本文提出了一种基于跟踪微分器的框架转速测量方法,用数值积分的方式代替传统的后向差分方法,减小了量化噪声和测量噪声对框架超低速时速度测量的影响。该方法计算量小,易于调节和实现。仿真结果表明:该方法能有效地提高框架超低速时的测速精度。最后,在实际控制力矩陀螺上进行了试验验证,试验结果表明:在给定框架转速0.01(°)/s的情况下,相比于传统的后向差分法,采用跟踪微分器计算转速,控制力矩陀螺框架转速的波动量减小了67.1%。
References)
[1] 鲁明,张欣,李耀华. SGCMG框架伺服系统扰动力矩分析与控制[J]. 中国空间科学技术,2013,33(1):15-20.
LU M,ZHANG X,LI Y H. Analysis and control of disturbance torque in SGCMG gimbal servo system[J]. Chinese Space Science and Technology,2013,33(1):15-20(in Chinese).
[2] 张尧,金磊,徐世杰. 小型控制力矩陀螺扰动建模及性能指标分析[J]. 中国空间科学技术,2012,32(4):45-53.
ZHAGN Y,JIN L,XU S J. Disturbance modeling and performance index evaluation of the small control moment gyroscope[J]. Chinese Space Science and Technology,2012,32(4):45-53(in Chinese).
[3] KAVANAGH R C,MURPHY J M D. The effects of quantization noise and sensor nonideality on digital differentiator-based rate measurement[J]. IEEE Transactions on Instrumentation and Measurement,1998,47(6):1457-1463.
[4] 邵长胜,陈海鹏. 控制力矩陀螺速率控制中测角系统的研究[J]. 中国惯性技术学报,2004,12(1): 77-80.
SHAO C S,CHEN H P. Angle measuring system in SGCMG[J]. Journal of Chinese Inertial Technology,2004,12(1):77-80(in Chinese).
[5] 鲁明,李耀华,张激扬,等. 控制力矩陀螺框架伺服系统的超低速测速方法[J]. 中国惯性技术学报,2012,20(2):234-238.
LU M,LI Y H,ZHANG J Y,et al. Ultra-low speed detection method for CMG gimbal servo systems[J]. Journal of Chinese Inertial Technology,2012,20(2):234-238(in Chinese).
[6] LENINE D,RAMI R B,VIJAY K S. Estimation of speed and rotor position of BLDC motor using extended Kalman filter[C]∥Proceedings of IET-UK International Conference on Information and Communication Technology in Electrical Sciences,2007:433-440.
[7] 胡展敏,袁登科. 基于MRAS的永磁同步电机无速度传感器控制研究[J]. 机电一体化,2014,20(11):20-24.
HU Z M,YUAN D K. Study on the speed sensorless control of PMSM based on MRAS[J]. Mechatronics,2014,20(11):20-24(in Chinese).
[8] KANG J S,ZENG X Y,WU Y,et al. Study of position sensorless control of PMSM based on MRAS[J]. IEEE International Conference on Industrial Technology,2011(1):1-4.
[9] 张雪,魏大忠,周大宁. 一种高性能控制力矩陀螺框架控制方法的仿真研究[J].空间控制技术与应用,2012,38(2):35-40.
ZHANG X,WEI D Z,ZHOU D N. Simulation study on a high performance gimbal control method for control moment gyro[J]. Aerospace Control and Application,2012,38(2):35-40(in Chinese).
[10] 刘益民,李变侠,车嵘,等. 转台伺服系统中高精度测速方法的研究与实现[J]. 科学技术与工程,2007,8(7):1732-1734.
LIU Y M,LI B X,CHE R,et al. Research and realization of high accuracy measurement methods for servo control system of swivel table[J]. Science Technology and Engineering,2007,8(7):1732-1734(in Chinese).
[11] 崔恒荣,郭宇. 卧式车床主轴测速系统的设计[J]. 机械制造与自动化,2014,43(1):28-30.
CUI H R,GUO Y. Design of velocity measurement system of horizontal lathe spindle[J]. Machine Building & Automation,2014,43(1):28-30(in Chinese).
[12] HAN J Q,WANG W. Nonlinear tracking-differentiator[J]. J.Sys.Sci.and Math. Scis.,1994,14(2):177-183.
[13] HAN J Q,HUANG Y C. Frequency characteristic of second-order tracking-differentiator[J]. Mathematics in Practice and Theory,2003,33(3):71-74.
[14] SU Y X,ZHENG C H,MUELLER P C,et al. A simple improved velocity estimation for low-speed regions based on position measurement only[J]. IEEE Transactions on Control Systems Technology,2006,14(5):937-942.
[15] 乔冠宇,高慧斌. 利用非线性跟踪微分器测速测加速度的研究[J]. 仪表技术与传感器,2013(1):105-107.
QIAO G Y,GAO H B. Research on velocity and acceleration measurement based on nonlinear tracking-differentiator[J]. Instrument Technique and Sensor,2013(1):105-107(in Chinese).
[16] 张海丽,张宏立. 微分跟踪器的研究与应用[J]. 化工自动化及仪表,2013,40(4):474-477.
ZHANG H L,ZHANG H L. Research and application of differential tracker[J].Control and Instruments in Chemical Industry,2013,40(4):474-477(in Chinese).
[17] 赵鹏,姚敏立,陆长捷,等. 高稳快速非线性-线性跟踪微分器设计[J]. 西安交通大学学报,2011,45(8):43-48.
ZHAO P,YAO M L,LU C J,et al. Design of nonlinear-linear tracking differentiator with high stability and high speed[J]. Journal of Xi′an Jiaotong University,2011,45(8):43-48(in Chinese).
(编辑:车晓玲)
Research on ultra-low speed measurement for CMG gimbal based on tracking-differentiator
SU Nuo,LU Ming*,ZHAI Baichen,HU Yuewei
BeijingInstituteofControlEngineering,Beijing100190,China
At ultra-low speed,the precision of gimbal speed measurement is a key factor which influences the control accuracy of a control moment gyro (CMG) gimbal system. Focusing on the problem of noise amplification brought by conventional first-order backward differentiator when calculating ultra-low speed,a real-time speed estimation method based on a non-linear tracking differentiator and its discrete time expression using the fourth order Runge-Kutta method was proposed. A composite speed measuring method was presented to solve the tracking delay problem when using tracking differentiators directly. Then,the numerical simulation and experiment were conducted. The simulation results demonstrate that the speed estimation method proposed could reduce the quantization noises brought by tachometers and measurement noises.The experimental results show that by using tracking-differentiators the fluctuation of gimbal speed is reduced by 67.1%.
control moment gyro (CMG);gimbal;PMSM;ultra-low speed;tracking differentiators
10.16708/j.cnki.1000-758X.2017.0048
2016-11-25;
2017-04-25;录用日期:2017-05-18;网络出版时间:2017-05-31 09:42:45
http:∥kns.cnki.net/kcms/detail/11.1859.V.20170531.0942.003.html
国家自然科学基金项目(11402019)
宿诺(1993-),男,硕士研究生,sunuo_cast@163.com,研究方向为航天器执行机构技术
*通讯作者:鲁明(1981-),男,高级工程师,luming@hotmail.com,研究方向为航天器执行机构技术
宿诺,鲁明,翟百臣,等.基于跟踪微分器的CMG框架超低速测速方法研究[J].中国空间科学技术,2017,37(3):
126-131.SUN,LUM,ZHAIBC,etal.Researchonultra-lowspeedmeasurementforCMGgimbalbasedontracking-differentiator[J].ChineseSpaceScienceandTechnology,2017,37(3):126-131(inChinese).
V448
A
http:∥zgkj.cast.cn
