基于SDSGTWR算法的TOF精确定位系统
2017-06-29黄慧哲贺乃宝罗印升
殷 臻, 黄慧哲, 李 伟,陆 毅, 贺乃宝, 罗印升
(江苏理工学院 电气信息工程学院, 江苏 常州 213001)
基于SDSGTWR算法的TOF精确定位系统
(江苏理工学院 电气信息工程学院, 江苏 常州 213001)
分析了SDS-TWR测距算法的定位原理,提出了基于TOF(time of flight,TOF )技术、采用SDS-TWR(symmetrical double-sided two way ranging,SDSTWR )测距算法的煤矿巷道精确定位系统方案。测试结果表明, 该系统的定位精度95%,达到6 m以内信号有效覆盖范围半径为500 m,功耗满足矿用设计要求,验证了方案的可行性。
煤矿巷道; 精确定位; TOF; SDS-TWR
煤炭开采环境基本是地下且巷道条件复杂、环境恶劣,因此井下人员定位系统在煤矿安全生产以及考勤管理方面发挥着重要的作用[1]。目前市场上区域定位系统已不能满足煤矿对人员位置信息的实时性与准确性要求,并且绝大多数精确定位系统方案成本高,覆盖范围小[1-2]。本文在研究TOF(time of flight)技术的测距原理的基础上,提出了一种基于TOF技术、采用SDS-TWR测距算法的精确定位方案,并通过实验验证了该方案的可行性。
1 TOF技术及TWR测距原理
TOF技术通过测量无线信号在2个节点之间的飞行时间实现距离测量。传统TOF方案一般采用双路(TWR)测距算法,该算法采用双向测量,因此该算法不需要进行节点间的数据同步。在TWR测距中节点A发送一个Poll数据到节点B,节点B收到数据包后返回一个Ack数据包,如图1所示。
TroundA为节点A发出Poll数据包到接收到Ack数据包用的时间;TReplyB为节点B收到Poll数据包到发出Ack包所用的时间。数据包传播时间Tp为
(1)
节点A与节点B之间的距离d为
(2)
时钟晶体存在频率偏差,设节点A的频率偏差为FdA,节点B的频率偏差为FdB,则数据包在空中传播的实际时间Tr为
(3)
数据包在空中传输时间的误差ΔT为
由于TroundA=2Tp+TReplyBB
由于Tp远小于TReplyB,因此FdA×Tp可以忽略不计,则有
(4)
因此节点A和节点B的距离误差Δd为
(5)
2 SDS-TWR测距算法原理
为了避免TWR方法中晶体频率误差引起的计时
误差,引入SDS-TWR算法[3]。SDS-TWR是TWR算法的改进,利用2个节点双边各进行一次TWR过程实现消除节点间晶体频率误差[4]引起的计时误差,其过程见图2。
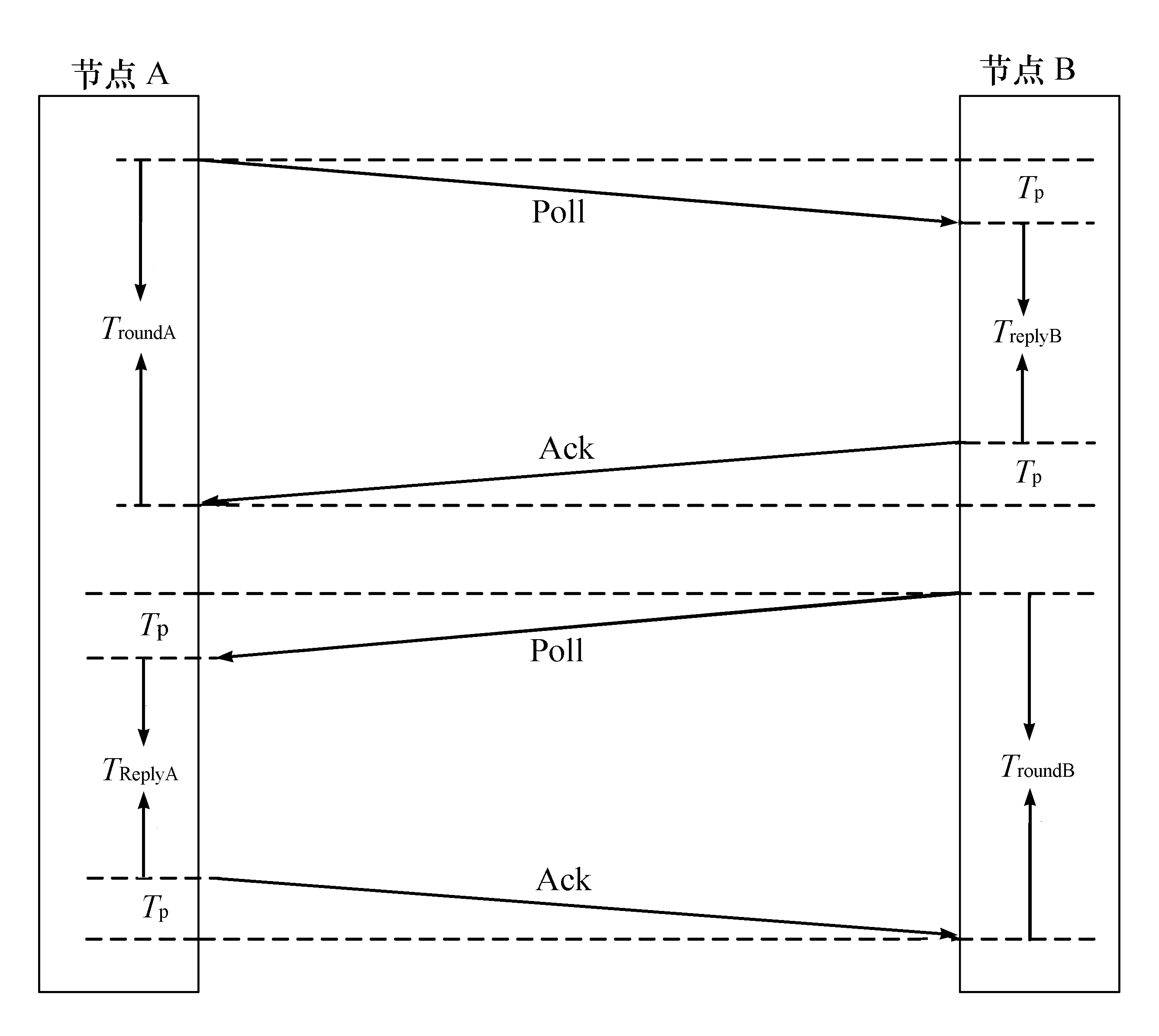
图2 SDS-TWR 测距算法原理
SDS-TWR的测距过程是在节点A发起一次的测距完成后,再利用节点B进行反方向测距一次,则数据包传播时间Tp即为
(6)
由于节点时钟晶体存在频率偏差,信号在空中传播的实际时间Tr为
(7)
无线数据包在空中传输时间的误差ΔTs为
(8)
由于Tp远小于TReplyB和TReplyA,因此FdB×Tp和FdA×Tp可以忽略不计,因此有
(9)
对比TWR的ΔT和SDS-TWR的ΔTs,可以看出SDS-TWR大大降低了晶体频率偏差所引起计时误差。假设晶振频偏为±50×10-6Hz,节点相应时间差为0.1ms,因此测距误差理论值为±3m,如果选用低频偏的晶体如±10×10-6Hz可进一步降低测距理论误差至±0.6m。
3 精确定位系统设计
3.1 系统架构
为进一步验证采用SDS-TWR测距算法的可行性,设计了采用SDS-TWR测距算法并基于TOF技术精确定位系统[5]。系统主要由定位主机、定位服务器、交换机、井下定位基站以及定位标签等组成[6]。系统结构见图3。
基站和定位标签都采用集成了ZigBee协议[7]与TOF测距引擎的JN5168无线微处理器[8],射频前端射频功放,使得发射功率达到了+10dBm,射频发射电流控制在55mA以内,接收电流控制在31mA内,休眠电流不大于2μA;基站主控器采用STM32系列[9]控制器为核心,具有高速以太网及RS485[10]总线接口。定位标签采用锂电池供电,采用定时器唤醒技术,每3s唤醒一次标签进行定位。
3.2 系统工作流程
(1) 网络注册。定位标签3s唤醒一次后进行网络搜索,发送广播数据包,如基站处于工作状态,基站收到数据包后分配时隙给标签卡,回复同步数据包,完成注册。若注册失败再次唤醒后重新进行注册。

图3 矿用精确定位系统结构
(2) 发起测距。标签成功搜索到网络并且得到定位时隙后与基站进行测距,测距的结果与标签的ID[11]以及其他标签信息统一打包发给基站,测距结束后释放占用的时隙资源。如果测距失败再次唤醒后重新进行网络注册。
(3) 数据传输。基站根据不同无线模块接收到的距离信息判断方向,重新将数据打包通过高速以太网发送到地面定位服务器。
(4) 数据处理。地面定位服务器收到数据后利用滤波算法,对数据进行二次处理,进一步提高位置数据的准确性。
(5)Web发布。服务器将有效的人员位置信息、人员分布状况和设备状态通过Web发布,用户可以通过PC主机或者手机设备访问Web进行查看管理。
3.3 方向性判定
在此系统中,利用单CPU驱动2个独立射频收发电路实现单基站判断标签方向性[12]。井下巷道由于狭小可以想象成一条线,利用定向天线信号反向衰减的特性CPU得到的2个射频模块的距离值进行比较,从而判断标签的具体位置,此方案的关键是基站射频模块要作屏蔽处理,防止标签信号直接通过天线以外的途径耦合进去,产生错误的位置信息,导致误差变大。位置判定原理示意图见图4。
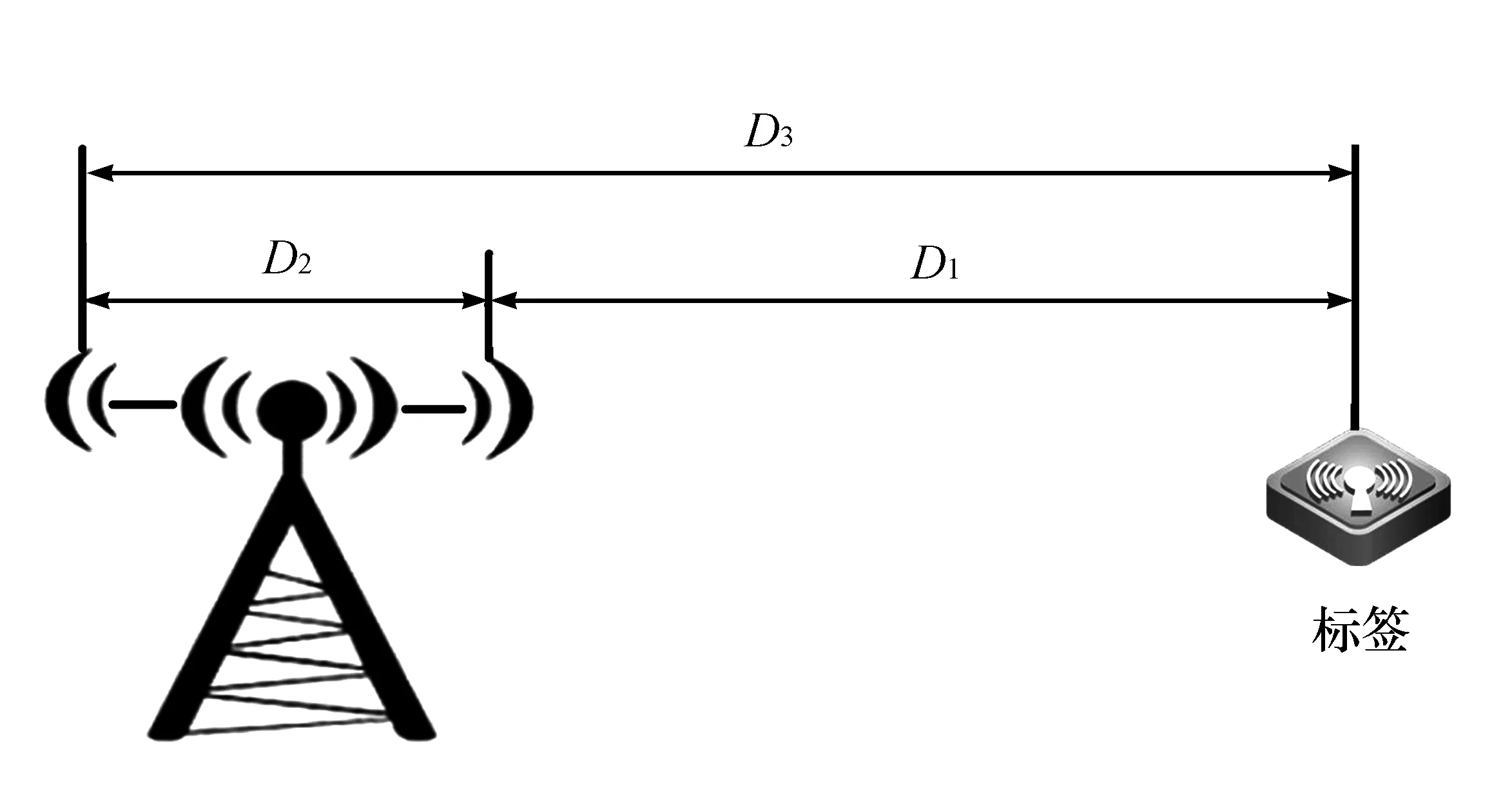
图4 标签测距位置判定原理示意图
规定D2为3 m,D1
4 实验结果分析
4.1 定位精度与无线覆盖范围
(1) 测试环境:晴朗微风,温度19 ℃,相对湿度65%,空旷郊区公路(无车无遮挡)。
(2) 测试条件:射频发射功率为+10 dBm,接收灵敏度为-102 dBm,数据速率250 kbit/s,基站采用2.4 GHz频率、增益为14 dB的定向天线。标签采用增益为2.5 dB的柔性PCB天线。系统测试了10、50、100、200、350、500 m的位置5次测量数据,位置测试数据见表1。

表1 位置测试数据 m
测试结果说明, 定位精度95%以上保持在6 m以内,有效视距覆盖范围到达了500 m以上。
4.2 标签卡功耗测试
标签采用单节1 200 mAh锂电池供电,电池电压为4.2 V,发射功率为10 dBm,利用示波器抓取标签的静态休眠电流为20 μA,发射电流为52 mA,接收电流为30 mA。利用万用表测量标签工作1 h的平均功耗约为0.5 mAh,电池理论工作时间为90 d。
5 结语
本文结合JN5168 无线微控制器设计了一套基于TOF定位技术和SDS-TWR测距算法的矿用巷道精确定位系统。实验结果表明,该系统在定位精度和功耗控制上都达到了设计要求,验证了方案的可行性。
References)
[1] 张科帆,朱海霞,包建军. 基于CSS技术的井下精确定位系统设计[J]. 工矿自动化,2014(1):5-8.
[2] 王飞. 基于TOF技术的煤矿井下精确定位系统设计与实现[J]. 煤炭技术,2015(10):262-264.
[3] 常琳. SDS—TWR技术在煤矿人员定位系统中的应用[J]. 工矿自动化,2015,41(10):71-73.
[4] 陈传军. 基于采集相位的瞬时测频技术[J]. 现代电子技术,2008(15):168-170.
[5] 王保华,王立德,郑策,等. SDS-TWR无线测距在城轨列车防撞系统中的应用研究[J]. 北京交通大学学报,2015(6):48-53,61.
[6] 刘志高,李春文,丁青青,等. 煤矿人员定位系统拓扑优化模型[J]. 煤炭学报,2010(2):329-332.
[7] 冉彦中,曹婧华,姜威,等. ZigBee协议星型组网实验的设计与实现[J]. 实验技术与管理,2013,30(2):34-35.
[8] 李月华,郭玮,朱卫华,等. 基于JN516x的井下人员定位前端系统的研究[J]. 南华大学学报(自然科学版),2015(3):42-44.
[9] 彭红星,郭威. 基于STM32的矿井微震数据采集监测分站[J]. 仪表技术与传感器,2013(10):65-67.
[10] 胡文涛. 一种基于协议的提高RS485实时性的方法[J]. 现代电子技术,2013(18):5-7.
[11] 赵俊杰. 煤矿井下人员定位系统的设计与实现[D].新乡:河南师范大学,2014.
[12] 苏静,吴桂义. 煤矿井下人员定位系统现状与发展趋势[J]. 内蒙古煤炭经济,2012(9):111-112.
TOF accurate positioning system based on SDS-TWR algorithm
Yin Zhen, Huang Huizhe, Li Wei, Lu Yi, He Naibao, Luo Yinsheng
(School of Electrical and Information Engineering, Jiangsu University of Technology, Changzhou 213001, China)
The positioning principle of SDS-TWR ranging algorithm is analyzed, and a scheme of the accurate positioning system for the coal mine roadway based on TOF (time of flight) technology is proposed by using SDS-TWR SDS-TWR (symmetrical double-sided two way ranging) ranging algorithm. Test results show that the positioning accuracy of the system is 95% within 6 m, the effective coverage radius of the signal is 500 m, and the power consumption can meet the design requirements of the mine. Therefore, the feasibility of the scheme is verified.
coal mine roadway; accurate positioning; time of flight(TOF); symmetrical double-sided two way ranging (SDS-TWR)
10.16791/j.cnki.sjg.2017.05.024
2016-11-25
2016江苏省大学生创新创业训练计划项目“TOF技术在无线传感器网络中的应用研究”(201611463006Z)
殷臻(1995—),男,江苏常州,本科本,主要研究方向电子信息工程
E-mail:2013311113@smail.jstu.edu.cn;
陆毅(1976—),男,江苏常州,工学硕士,讲师,主要研究方向通信与信息系统.
E-mail:luyi3652002@163.com
TD655
A
1002-4956(2017)5-0095-04
