基于ANFIS的纯电动轻卡自动换挡策略
2017-06-29倪红
倪 红
(福建船政交通职业学院 汽车运用工程系,福州 350007)
基于ANFIS的纯电动轻卡自动换挡策略
倪 红
(福建船政交通职业学院 汽车运用工程系,福州 350007)
在纯电动轻卡中,不同的换挡策略对于汽车的能耗有着很大的影响。基于模糊神经网络控制理论,依据传统的两参数换挡规律,采用具有2输入单输出的Sugeno模糊推理结构,建立了ANFIS换挡策略。通过具体的样本数据对换挡策略进行训练,在Cruise中搭建纯电动轻卡的整车模型作为仿真环境,代入整车参数进行仿真,将得到的仿真结果与传统模糊换挡策略进行分析比较,结果表明:ANFIS换挡策略能有效改善车辆的操作稳定性和经济性能,并在能耗上得到优化。
模糊系统;ANFIS;换挡策略;纯电动轻卡;整车仿真
随着能源危机和环境污染日益严重,发展新能源汽车成为目前的趋势。用于短途运输的轻型卡车在汽车总量中占有很大比重,开发纯电动轻卡对于解决上述问题有着积极意义。在纯电动轻卡的开发过程中,采用自动换挡技术可以提高车辆的使用性能。自动换挡技术的关键在于换挡策略的制定,即根据车辆参数确定车辆运行状态中的最佳挡位。
传统的自动换挡控制策略分为单参数(车速),二参数(车速、油门开度),三参数(车速、油门开度、加速度)换挡策略。其中,两参数换挡策略运用较为成熟。但传统的两参数换挡策略是建立在被控对象精确模型上的,而卡车的工作环境、操纵控制非常复杂,建立其精确的数学模型极其困难,因此近年来智能控制技术在汽车上的运用越来越广泛,其中模糊控制和神经网络控制在汽车自动换挡控制策略的制定中已逐渐得到应用。吕欢欢[1]基于模糊控制理论,建立了车辆坡道换挡过程的模糊换挡控制系统,并进行了仿真。葛江城[2]针对车辆自动变速系统的非线性,应用模糊逻辑控制理论,设计了能反映驾驶员意图的车辆换挡模糊控制器,并利用遗传算法对模糊控制器的参数进行了优化。李秀兰等[3]以多尺度小波神经网络为基础构建了换挡模型,并利用数据对建立的模型进行了实验验证。模糊系统可以表达人的经验型知识,便于理解,但移植性较差。神经网络具有极强的非线性映射能力和泛化能力,可以进行动态训练以适应车况、路况、驾驶员特性的变化。模糊神经网络(ANFIS)将模糊系统和神经网络相结合,即具有模糊信息处理能力又有学习、识别和自适应能力。与采用单一模糊系统相比,模糊神经网络系统在处理大规模的模糊应用问题方面表现出更优越的效果。因此,本文提出一种基于ANFIS的自动换挡策略,并在CRUISE中进行整车模型仿真实验。将基于ANFIS的换挡策略与模糊换挡策略进行仿真比较来验证所制定的换挡策略的合理性与优越性。
1 模糊神经网络换挡策略
模糊神经网络系统其本质就是将模糊输入信号和模糊权值输入常规的神经网络。在模糊神经网络中,神经网络的输入、输出节点表示模糊系统的输入、输出信号,神经网络的隐含(中间)节点表示隶属函数和模糊规则。传统模糊系统的规则集和隶属度函数等设计参数只能靠设计经验来选择,而模糊神经网络系统则利用神经网络的学习方法,根据输入、输出的学习样本自动设计和调整模糊系统的设计参数,实现模糊系统的自学习和自适应功能。
1.1 输入、输出变量及隶属度函数
以目前最为通用的二参数换挡规律作为主要研究目标,以车速和油门开度为输入量,以挡位为输出量,采用2输入、单输出的1阶Sugeno模糊推理系统[4],其模糊规则形式为:
ifx1isA1iandx2isA2i, thenui=pix1+qix2+ri(i=1、2、3、…、n)
当xi激活m条模糊规则时,输出结论将由这m条规则的输出ui决定。
基于Sugeno型模糊推理建立模糊神经网络系统(ANFIS)结构,该结构通过对已知数据的学习,经过训练,可使设计出的模糊系统能模拟理想的输入、输出关系。
根据优秀驾驶员的驾驶经验和车辆行驶时的状态参数,选取车辆的行驶速度和油门开度作为ANFIS换挡策略的输入量,选取挡位位置作为输出量[5-8]。
根据所建立的Sugeno模糊推理系统的需要,选择输入变量车速和油门开度的模糊集合分别为:
车速:{VS(很小)、S(小)、M(中)、B(大)、VB(很大)}
油门开度:{VS(很小)、S(小)、M(中)、B(大)、VB(很大)}
将车速和油门开度进行量化,选取各变量的论域分别为:
车速:
{0,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18}
油门开度:
{0,0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1}
车速的实际范围是[0 120];油门开度的实际范围是[0 1]。
根据各变量的论域和实际范围可得量化因子分别为:车速量化因子k1=0.15,油门开度量化因子k2=1。
取各输入模糊变量的隶属度函数为高斯分布,车速和油门开度的各模糊子集的隶属度曲线如图1、2所示。
1.2 建立ANFIS换挡规则
ANFIS换挡则基于优秀驾驶员的驾驶经验和专家知识,并参照Sugeno模糊推理系统结构,制定出如表1所示的自动换挡规则。
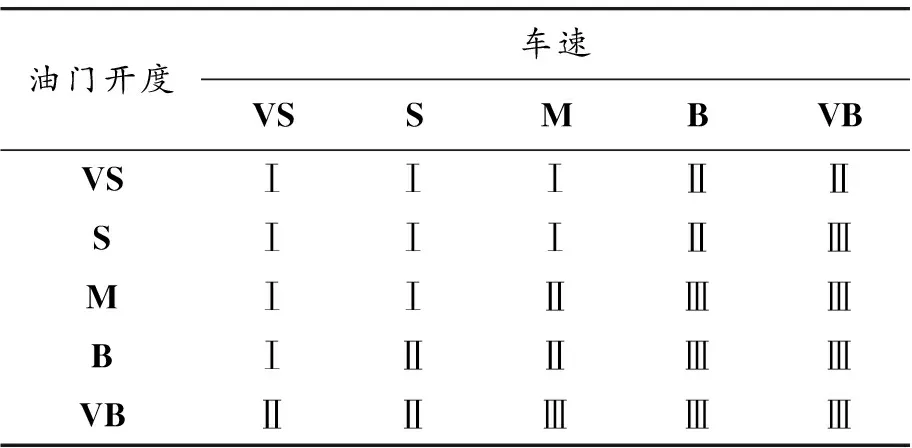
表1 换挡规则
1.3 基于ANFIS的换挡策略
以车速和油门开度为输入量,以挡位为输出量,将上述建立的ANFIS换挡规则导入Simulink中,建立最终的换挡控制策略,如图3所示。

图1 车速隶属度函数

图3 ANFIS换挡策略模型
2 整车仿真及结果分析
将制定的ANFIS换挡策略嵌入整车环境中进行仿真分析,来验证其优越性和合理性。利用Cruise搭建纯电动轻卡的整车模型,并通过与Matlab(DLL)的接口,将换挡策略嵌入整车模型中。由于Cruise中没有相应的切换挡位的模块,因此采用开闭离合器的方式[9]来达到切换挡位的目的。整车模型如图4所示。

图4 纯电动轻卡整车模型
选择NEDC循环行驶工况,对模糊换挡策略和ANFIS换挡策略进行对比仿真。纯电动轻卡的整车参数如表2所示。
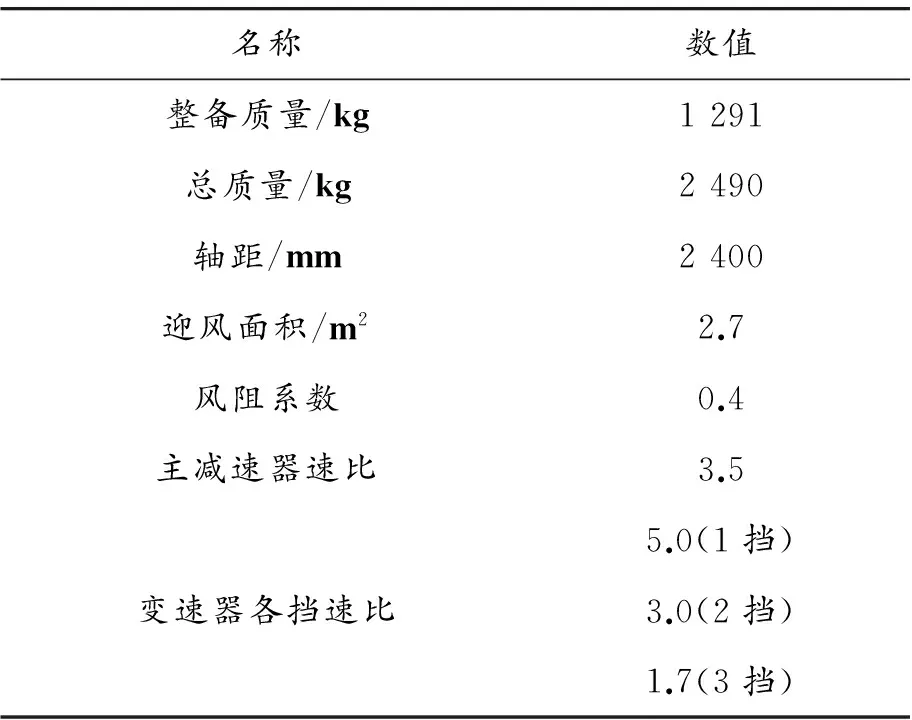
表2 纯电动轻卡整车参数
将纯电动轻卡的主要参数输入整车模型的相应模块中进行仿真分析,仿真结束后得到车辆跟随曲线和挡位变化情况,见图5~7。
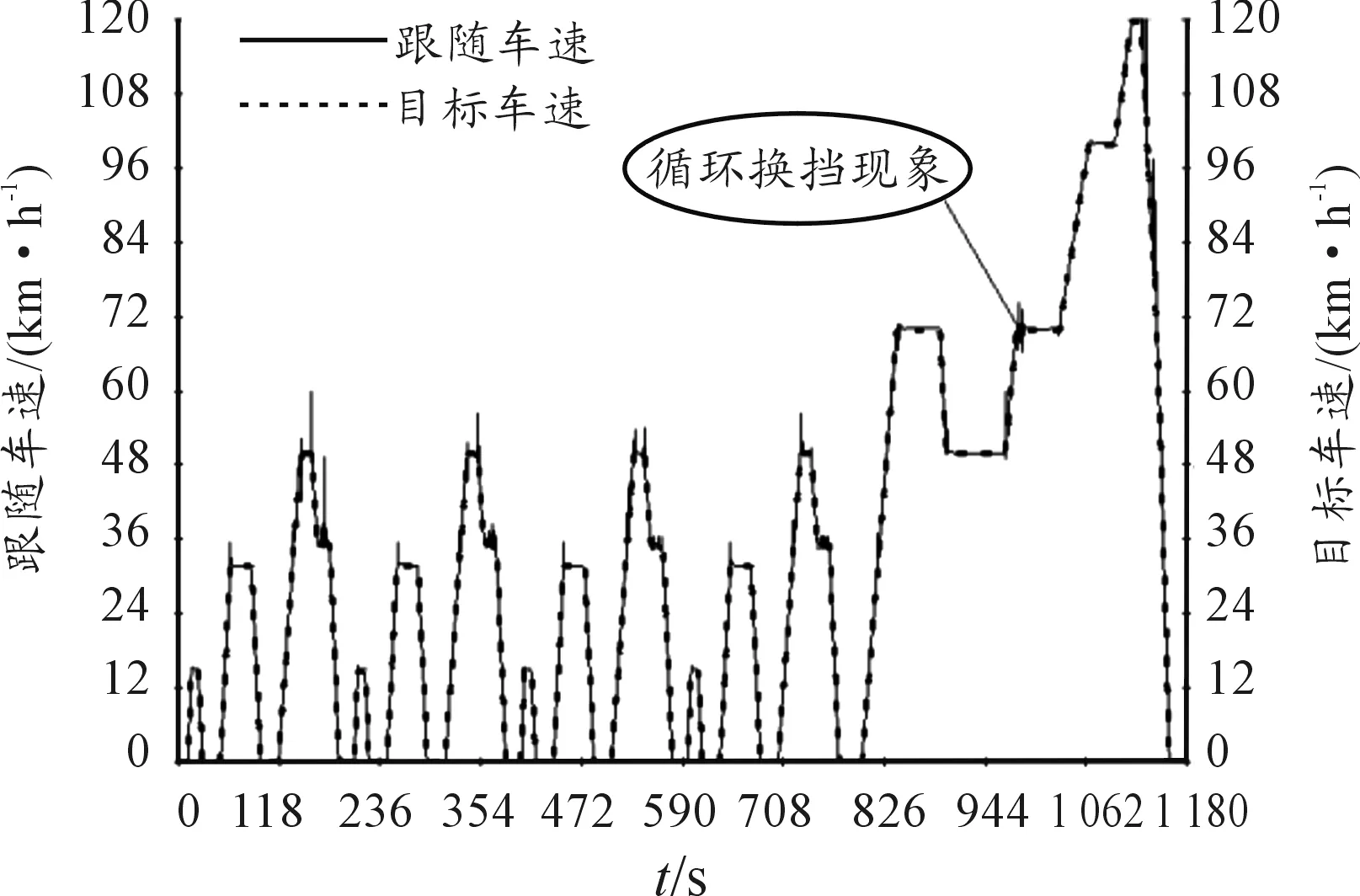
图5 NEDC工况下车辆跟随曲线(模糊换挡策略)

图6 NEDC工况下车辆跟随曲线(ANFIS换挡策略)
图5、6分别为基于模糊换挡策略和ANFIS换挡策略的车辆跟随曲线。从图中可以看出:基于ANFIS换挡策略的车辆的跟随曲线较为平顺光滑,车辆可以跟随设定的目标车速运行;而基于模糊换挡策略的跟随车速在某一时刻出现了尖峰,并且在运行过程中存在循环换挡的现象。
经过分析发现:出现尖峰和循环换挡现象的原因是由于模糊换挡策略中的某一些关键参数设置不够准确,而这些关键参数的设置是基于经验得来,并不能保证适合所有的控制对象。ANFIS换挡策略通过自身的学习能力,经过样本数据的训练后,关键参数可以自动调整到准确值,进而模拟出更加符合驾驶员驾驶习惯的输入、输出关系,与模糊换挡策略相比,提高了车辆的操作稳定性,验证了ANFIS换挡策略的优越性。
图7为NEDC工况下挡位变化情况,从图中可以看出:在整个仿真过程中,挡位的变化符合驾驶员的操作意图,验证了ANFIS换挡策略的合理性。
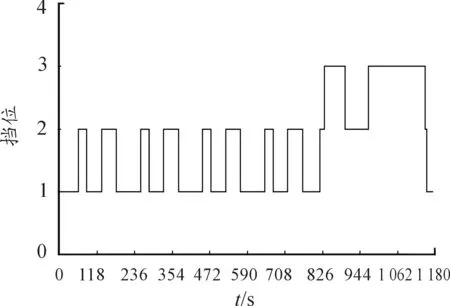
图7 NEDC工况下挡位变化情况(ANFIS换挡策略)
图8为不同换挡策略下的工况能耗对比,从图中可以看出:模糊换挡NEDC工况能耗为2.2 kW·h,基于ANFIS的自动换挡策略的NEDC工况能耗为1.93 kW·h,可以看出基于ANFIS的自动换挡策略下的能耗降低了12.3%。与模糊换挡策略相比,ANFIS换挡策略可以明显改善车辆的经济性能。
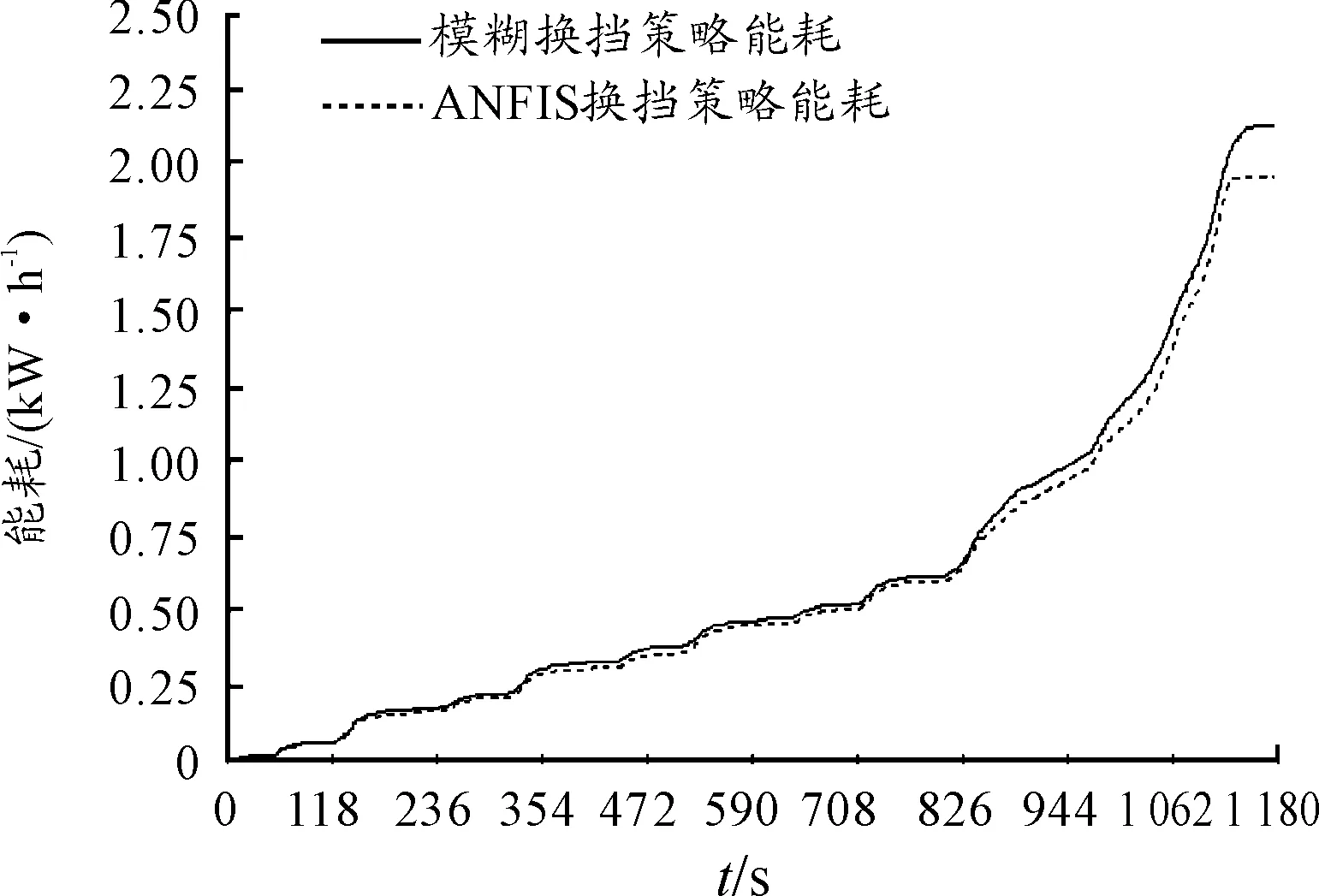
图8 两种换挡策略的工况能耗对比
3 结束语
本文基于传统的两参数换挡规律,建立了ANFIS换挡策略,并通过具体的样本数据对换挡策略进行了训练,在整车环境中与模糊换挡策略进行分析比较。仿真结果表明:ANFIS换挡策略能有效地改善车辆的操作稳定性和经济性能。
[1] 吕欢欢.基于模糊修正的AT车辆坡道换挡策略研究[D].长春:吉林大学,2013.
[2] 葛江城.并联混合动力轿车机械式自动变速器换挡策略研究[D].长春:吉林大学,2012.
[3] 李秀兰,秦四成,杨洪韬.基于多尺度神经网络的工程车辆换挡策略[J].四川大学学报(工程科学版),2013(2):173-176.
[4] 颜振萍,艾剑良.ANFIS在飞机稳定控制系统中的应用[J].复旦学报,2010,49(4):530-534.
[5] 朱丹丹.基于城市道路工况纯电动汽车自动变速器换挡规律的研究[D].合肥:合肥工业大学,2012.
[6] 姚海峰.纯电动汽车整车性能建模与仿真[D].南京:南京理工大学,2011.
[7] 张炳力,张友皇,赵韩.基于Simulink与Stateflow的自动变速器性能仿真[J].合肥工业大学学报(自然科学版),2010,33(8):125-130.
[8] 于英,肖棒,彭耀润,等.基于效率换挡规律的工程车辆换挡品质研究[J].重庆理工大学学报(自然科学),2016(7):1 -9.
[9] 秦浩.并联式混合动力客车AMT换挡策略研究[D].长春:吉林大学,2014.
(责任编辑 刘 舸)
Study on Strategy of Automatic Shift Based on ANFIS for Electric Truck
NI Hong
(Vehicle Application Department, Fujian Chuanzheng Communications College, Fuzhou 350007, China)
In pure electric light truck, different shift strategies have a great influence in energy consumption. The paper established the ANFIS shifting strategy based on the fuzzy neural network control theory and the traditional two parameters shift rules, training the ANFIS shifting strategy by the Sample data, and then built the vehicle model in the Cruise as a simulation environment. And substituting the parameters of the simulation, we obtained the simulation results, and then compared with the single fuzzy shift strategy. The results show that ANFIS shift strategy can effectively improve the efficiency of the vehicle. And the energy consumption has been optimized in the energy.
fuzzy system; ANFIS; shifting strategy; electric truck; vehicle simulation
10.3969/j.issn.1674-8425(z).2017.05.005
2016-10-22 基金项目:福建省交通运输厅基金资助项目(2014Y062)
倪红(1969—),女,福建福清人,副教授,主要从事汽车运用与技术服务研究,E-mail:416458823@qq.com。
倪红.基于ANFIS的纯电动轻卡自动换挡策略[J].重庆理工大学学报(自然科学),2017(5):29-33.
format:NI Hong.Study on Strategy of Automatic Shift Based on ANFIS for Electric Truck[J].Journal of Chongqing University of Technology(Natural Science),2017(5):29-33.
U469.722
A
1674-8425(2017)05-0029-05
