软体手臂刚度特性分析
2017-06-27项超群郝丽娜郭少飞李存峰
项超群 郝丽娜 张 颖 郭少飞 李存峰
(东北大学机械工程与自动化学院, 沈阳 110819)
软体手臂刚度特性分析
项超群 郝丽娜 张 颖 郭少飞 李存峰
(东北大学机械工程与自动化学院, 沈阳 110819)
气动肌肉驱动的软体机器人具有质量轻、功率密度比高、人机交互安全性高等优点。提出了一种由伸长型及收缩型气动肌肉组成的变刚度软体机器人手臂,能够实现位置与刚度的解耦。针对单根收缩型及伸长型气动肌肉进行了刚度测试实验,利用最小二乘法建立了单根气动肌肉气压、位移及刚度关系模型。基于所建立的单根气动肌肉刚度模型,针对所设计的软体手臂,建立了手臂刚度模型。搭建了手臂刚度测试实验平台,通过实验验证可知理论模型与实验模型的刚度变化趋势一致,平均相对误差为3.60%,最大相对误差为6.17%。
软体机器人; 伸长型气动肌肉; 收缩型气动肌肉; 静刚度模型; 实验
引言
随着机器人技术的迅猛发展,刚性机器人技术已经相当成熟,应用范围也很广泛,但其质量大,成本昂贵,与非结构化环境的兼容性差等缺点是不可避免的。软体机器人具有质量轻、结构简单、在非结构化的环境下适应性强、可通过改变身体形状在复杂自然环境条件下高效运动以及人机交互安全性高等优点,因此适合应用在刚性机器人难以工作的环境中。
通常软体机器人的驱动策略采用质轻及柔顺类驱动器,软体机器人的驱动方式有柔索驱动,形状记忆合金驱动[1]或气动驱动等。气动驱动的有OctArm[2],是基于静水骨骼结构设计,如章鱼触手、大象鼻子、哺乳动物舌头等都是典型的静水骨骼结构,均能产生伸长、收缩、弯曲和扭转等基本运动[3]。赵志刚等[4]研究了基于气动人工肌肉和缆绳组合驱动的三自由度柔性气动连续体机器人关节。2016年,中国科学技术大学课题组基于气动网格结构[5],研制了一种气动驱动的软体手臂HPN(Honeycomb pneumatic networks),HPN由若干六角形的内腔组成,长度为0.63 m,最大能承受2.8 N负载,最大充气压力为90 kPa,质量为1.5 kg。
CHEN等[6]研制了一种单段连续机器人(Clobot),由硅橡胶材料制作而成,其内部圆周上均布有6个通道,当Clobot在0.2 MPa气压驱动下,可以实现120°任意方向弯曲。德国费斯托公司(Festo)的仿生助力手(BHA)[7],根据大象鼻子的特点设计出新型仿生机器,原理在于它的每一节椎骨可以通过气囊的压缩和充气进行扩展和收缩。鲍官军等[8]应用自制的气动柔性球关节研制了气动柔性象鼻型连续机器人。但是这些气动驱动的软体手臂,无法实现负载不变及位置不变情况下刚度的改变。
提高机器人的灵活性,实现其变刚度特性,减轻机器人质量等是提高人机合作安全性的有效解决方案[9]。根据VANDERBORGHT等[10]的研究结果表明降低机器人与人发生碰撞时的撞击点的接触刚度能有效提高机器人的安全性。因此研究气动肌肉驱动的软体机器人刚度特性,对于实现其刚度可变可控,提高人机协作的安全性具有重要意义。
国内外对气动肌肉驱动结构刚度特性进行了很多研究[11-17],如建立气动肌肉驱动的机器人的刚度模型,主要是针对拮抗、并联和串联等机构,结构本体主要由刚性件组成,而不是建立气动肌肉驱动的软体机器人的刚度模型。
本文选用气动人工肌肉(PAM)作为机器人手臂的驱动器。初始编织角φ是气动肌肉的一个极
其重要的参数,当φ>55°44′时PAM为伸长型气动肌肉,当φ<55°44′时PAM为收缩型气动肌肉[18]。当气动肌肉充气时,第1种气动肌肉产生轴向伸长运动,第2种气动肌肉产生轴向收缩运动。本文设计由伸长型及收缩型气动肌肉组成的软体手臂,首先对软体手臂进行结构设计,然后建立软体手臂的刚度模型,最后对该模型进行实验验证。
1 软体手臂结构原理
1.1 结构设计
一般情况下,当气动肌肉充入0.3 MPa压力的气体时,收缩型气动肌肉的收缩率可达25%,伸长型气动肌肉伸长率可达40%。但在相同几何尺寸下,收缩型气动肌肉的输出力是伸长型气动肌肉的3倍左右。
软体手臂一共由4根气动肌肉组成:圆周均布3根收缩型气动肌肉及中间布置1根伸长型气动肌肉。目的是通过圆周方向布置的收缩型气动肌肉增加手臂的承载能力,通过收缩型与伸长型的工作长度差增大软体手臂的弯曲角度。文献[19]中的软体手臂也将气动肌肉安装在中间位置,但手臂的弯曲运动依靠电动机带动绳索驱动而不是通过气动肌肉驱动,存在灵活性差、承载能力低、柔顺性差等问题。3根收缩型气动肌肉距离中心35 mm,圆周120°均布。为保持3根收缩型气动肌肉与中心位置等距,通过打死结扣并通过固体胶固定的方式使收缩型与伸长型气动肌肉相连接,结扣的材料为尼龙。结扣保持收缩型气动肌肉与伸长型气动肌肉连接在一起,在轴向方向上每2个结扣之间距离约为25 mm,图1为软体手臂结扣位置示意图。手臂的主要结构尺寸如表1所示。
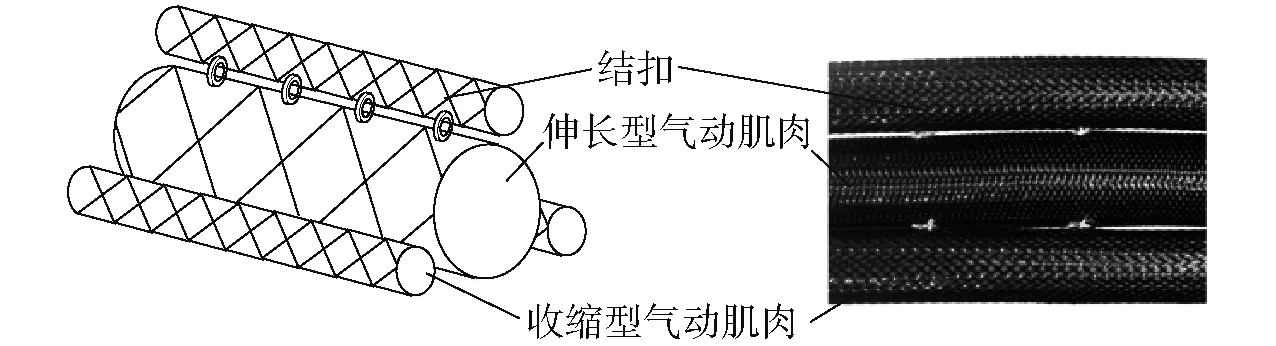
图1 手臂结构示意图Fig.1 Schematic of arm structure

表1 手臂尺寸及气动肌肉参数
1.2 工作原理
机构具有结构对称性,4个气动肌肉中分别通入不同压力的压缩空气,手臂发生伸长、弯曲、偏转等组合变形运动,并能在运动中根据实际需求改变自身刚度。
软体手臂的变刚度原理为:当手臂到达某一位置,同时调节伸长型及收缩型气动肌肉内部气压,使伸长型气动肌肉与收缩型气动肌肉产生的力相互平衡,实现手臂刚度与位置的解耦。
如图2所示,在保证手臂长度相同情况下,图2a对中间气动肌肉充气,其余3根气动肌肉不充气,实现手臂低刚度工作状态;图2b增加中间气动肌肉的压力,同时对其余3根收缩型气动肌肉充入一定压力的气体,产生一定的收缩力,保持位置不变,而实现手臂高刚度工作状态。同样,手臂弯曲运动时,通过调节3根收缩型气动肌肉内部压力及伸长型气动肌肉内部压力实现刚度的调节。
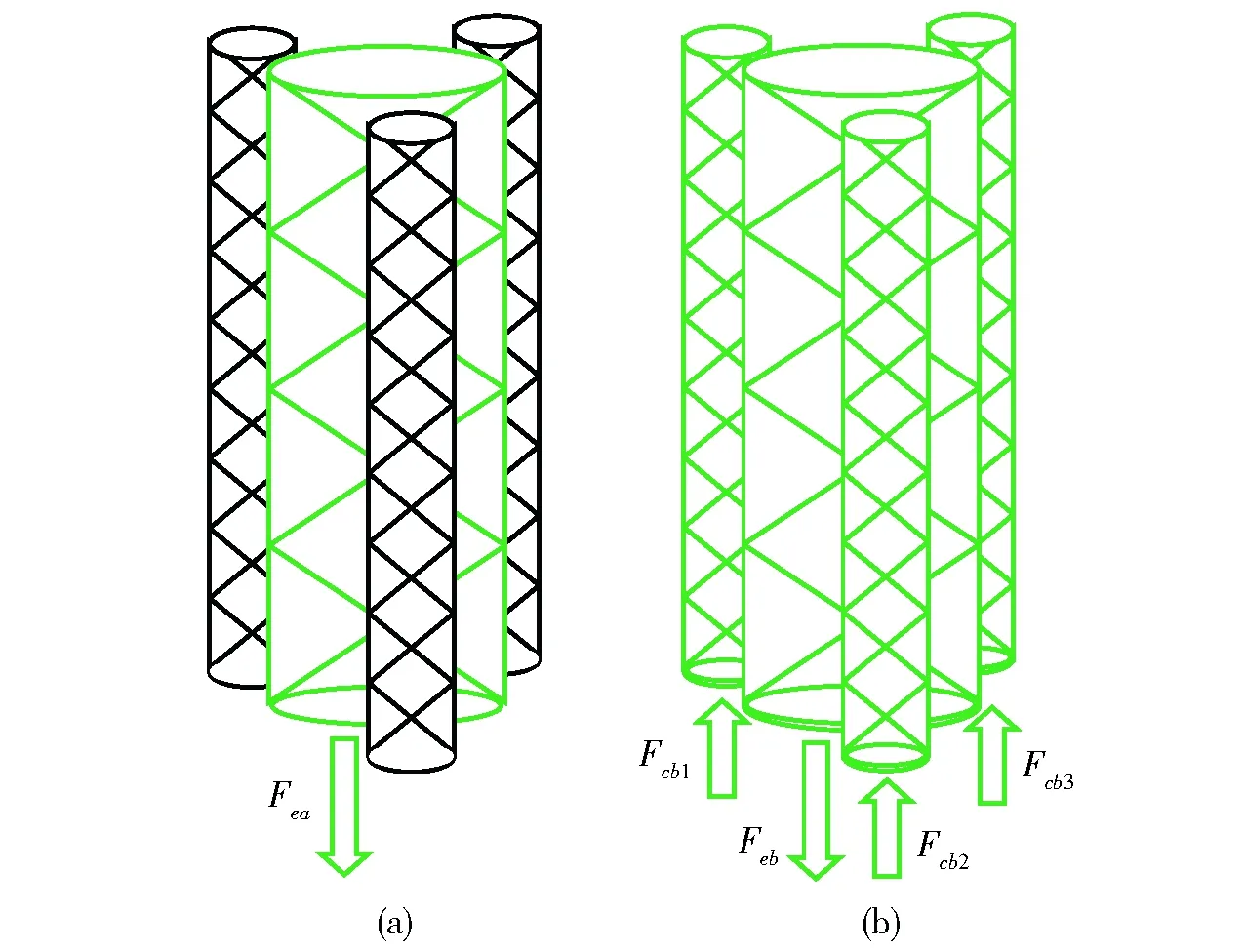
图2 软体手臂变刚度原理图Fig.2 Schematics of variable stiffness theory for soft arm
2 软体手臂刚度模型的建立
2.1 单根气动肌肉的力学模型实验辨识
由文献[20]可知,可以将气动肌肉视为变初始长度、变弹性系数的弹簧,则气动肌肉的输出力为
Fci=Kci(pci)(Li-Lci(pci)) (i=1,2,3)
(1)
Fe=Ke(pe)(Le(pe)-L)
(2)
式中pci、pe——3根收缩型及伸长型气动肌肉内部压力,MPa
Lci(pci)、Le(pe)——pci及pe压力下3根收缩型及伸长型气动肌肉无负载情况下的长度,m
Kci(pci)、Ke(pe)——3根收缩型及伸长型气动肌肉刚度,N/m
Li、L——3根收缩型及伸长型气动肌肉实时长度,m
2.1.1 实验搭建
本实验分别对收缩型及伸长型气动肌肉进行了测试,这2种气动肌肉的参数如表1所示。图3为实验测试系统简图,其中包括气动肌肉、SPCU(英国Shadow Robot公司的两位两通电磁阀)、气动三联件、空气压缩机、拉绳传感器、气缸、计算机及支架等。空气压缩机主要为气动肌肉及气缸供气,通过气动三联件进行调压及稳压。气缸为气动肌肉提供一定的负载,型号为SC32×75-S型,工作气压范围为0~1 MPa,气缸输出力为
式中D——气缸的活塞直径d——气缸活塞杆直径p——气缸内部压力

图3 单根气动肌肉实验测试系统图Fig.3 Schematic of experimental measurement system for pneumatic artificial muscle1.气缸 2.位移传感器 3.气动肌肉 4.计算机 5.支架 6.气动三联件 7.压力传感器 8.Arduino 9.SPCU 10.空气压缩机
气缸活塞杆前端与气动肌肉及拉线式位移传感器相连,用于测量气动肌肉的输出位移。气动肌肉通气端连接40PC150G2A型气压传感器(美国HONEYWELL公司),用来实时检查其内部压力。实验中,通过开源电子原型平台Arduino采集气压传感器及位移传感器数据,实时记录气动肌肉的压力及气动肌肉的时刻长度,并向SPCU发送PWM(脉冲宽度调制)信号来调节气缸及气动肌肉内部压力。
2.1.2 模型辨识
根据上述内容,气动肌肉可视为变初始长度及变弹性系数的弹簧。首先利用图3所示实验测试系统测试2种气动肌肉无负载时在不同压力下的长度,将气缸的内部压力设置为零,通过SPCU缓慢调节气动肌肉内部气压从零变化到0.3 MPa,每次增加0.02 MPa。实验过程中气动肌肉内部气压缓慢变化,整个测量呈现准静态过程。通过实验得出2种气动肌肉在不同压力下的长度,利用Matlab曲线拟合工具箱(cftool)对这2种气动肌肉的长度进行拟合。其拟合方程为
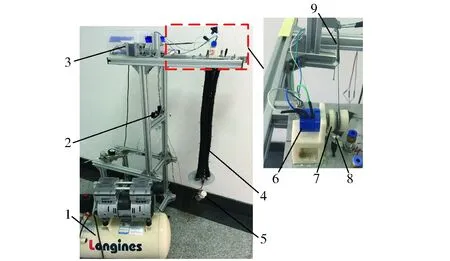
(0 MPa (3) (0 MPa (4) 其中a1=0.021 2,a2=-0.070 4,a3=-0.006 89,a4=0.628 44;b1=-0.038 93,b2=0.242 1,b3=-0.527,b4=0.47,b5=0.625。然后,利用图3所示实验测试系统测试2种气动肌肉不同压力下的刚度。通过气动三联件依次调节气动肌肉的内部压力从零变化到0.3 MPa,每次增加0.02 MPa,整个测量呈现准静态过程。通过实验得出2种气动肌肉在不同压力、不同负载下的长度变化,再次利用Matlab曲线拟合工具箱(cftool)分析,拟合的2种气动肌肉刚度方程为 (5) (6) 2.2 软体手臂刚度模型 根据气动肌肉的结构布局,假定软体气动手臂的弯曲运动能完全描述成一变曲率的均匀圆弧[21]。手臂的简化模型如图4所示,位置可由3个变量表示:曲率半径λ、偏转角θ和弯曲角度φ,则中间伸长型气动肌肉的长度为L=λ。上下2个圆盘分别为顶端圆盘和底部圆盘,O1为底部运动端圆盘圆心,O2为顶部固定端圆盘圆心,Oc为手臂弯曲的圆弧圆心,3根收缩型气动肌肉与顶端圆盘的交点分别为A1、A2、A3,与底端圆盘的交点为B1、B2、B3。在顶端圆盘中心处建立整体坐标系,坐标原点位于O2处,A1点位于x轴的正方向,z轴和顶端圆盘垂直。4根气动肌肉均未充气时的长度相等,为L0=625 mm。软体气动手臂主要靠气压进行工作,通过调节通入手臂的气压,实现其在空间各个方位的运动。根据手臂的对称性可知中间气动肌肉长度L为 (7) 图4为手臂空间位置及受力示意图,在任何位置,气动肌肉末端始终垂直于底端圆盘。图4b为取手臂底端圆盘为受力对象,分别对x1轴及y1轴取矩并根据受力的平衡关系得 (8) 图4 软体手臂几何位置及受力示意图Fig.4 Schematics of geometric position and force analysis 将式(1)、(7)分别代入式(8)并化简整理,得 (9) (10) (11) 将式(9)、(11)代入式(7)并整理,得 (12) 其中 A=Kc1Kc2Kc3 B=Kc1Kc2+Kc1Kc3+Kc3Kc2 在充气压力不变的情况下,软体手臂的刚度可表示为 (13) 由式(12)、(13)可得软体手臂的静态刚度表达式 (14) 3.1 实验装置 为验证所建立的软体手臂刚度与压强关系的模型,搭建了如图5所示实验装置,实验装置主要包括:软体手臂、Arduino Mega2560、气泵、气动三联件、1 kg砝码、电位计、滑轮、细绳、复位弹簧。实验中,通过气泵为4根气动肌肉提供气源,并通过气动三联件调节气动肌肉内部压力。细绳一端与复位弹簧相连,另一端通过打结的方式固定在软体手臂中间气动肌肉上,当软体手臂发生形变时,中间气动肌肉长度的变化通过细绳带动滑轮旋转改变电位计的阻值,利用Arduino采集手臂实时长度并将数据传递给上位机,利用砝码为手臂提供一定负载。 图5 实验装置图Fig.5 Test rig1.气缸 2.气动三联件 3.Arduino Mega2560 4.变刚度软体手臂 5.砝码 6.电位计 7.滑轮 8.细绳 9.复位弹簧 3.2 实验验证 在实验中,加砝码前,维持手臂长度为610 mm。先将伸长型气动肌肉充入一定气体,手臂会产生轴向伸长。然后对3根缩短型气动肌肉充入气体,以确保手臂长度保持610 mm。中间气动肌肉分别充入0、0.05、0.10、0.15、0.20、0.25 MPa气体。其所对应的3根收缩型气动肌肉充入的气体压力为0.080、0.090、0.100、0.120、0.140、0.145 MPa。保持手臂长度不变,然后在底端悬挂质量1 kg砝码,并通过Arduino读取手臂的长度变化量。本实验重复进行3次,通过胡克定律算出每次手臂的刚度,并取其平均值。图6为手臂刚度实验值与理论值对比。 图6 实验值与理论值对比Fig.6 Comparison of experiment and theoretical values 从图6可看出,理论值与实验值的整体变化趋势一致,其平均相对误差为3.60%,最大相对误差为6.17%。分析该模型产生误差的原因是模型没有将气动肌肉之间结扣的影响考虑进去,且其忽略了伸长型及收缩型气动肌肉中间的摩擦等因素。 (1)设计了一种软体手臂,该手臂由收缩型气动肌肉及伸长型气动肌肉组成。其具有较高的柔顺性,并且运动灵活,能够根据不同的使用需求实现刚度调节,该手臂具有良好的柔顺性和安全性。 (2)基于伸长型及收缩型气动肌肉的静刚度模型,建立了软体手臂的刚度模型,通过实验对比可知理论模型与实验模型的整体刚度变化趋势一致,其平均相对误差为3.60%,最大相对误差为6.17%。 1 LASCHI C, MATTEO C, BARBARA M, et al. Soft robot arm inspired by the octopus[J]. Advanced Robotics, 2012, 26(7): 709-727. 2 MCMAHAN W, CHITRAKARAN V, CSENCSITS M,et al. Field trials and testing of the OctArm continuum manipulator[C]∥Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006: 2336-2341. 3 KIER W M, SMITH K K. Tongues, tentacles and trunks: the biomechanics of movement in muscular-hydrostats[J]. Zoological Journal of the Linnean Society, 1985, 83(4): 307-324. 4 赵志刚, 陈志刚. 柔性气动连续体机器人关节结构设计与运动学分析[J]. 机械科学与技术, 2015, 34(2): 184-187. ZHAO Zhigang, CHEN Zhigang. Mechanism design and kinematics analysis of pneumatic soft continuum robot joint[J]. Mechanical Science and Technology for Aerospace Engineering, 2015, 34(2): 184-187.(in Chinese) 5 JIANG H, LIU X, CHEN X, et al. Design and simulation analysis of a soft manipulator based on honeycomb pneumatic networks[C]∥2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2016: 350-356. 6 CHEN G, PHAM M T, REDARCE T. Sensor-based guidance control of a continuum robot for a semi-autonomous colonoscopy[J]. Robotics and Autonomous Systems, 2009, 57(6):712-722. 7 FESTO. Bionic handling assistant[J]. Information Brochure. Festo, 2010. 8 鲍官军, 邵铁锋, 李尚会,等. 气动柔性摆动关节静态模型[J]. 农业机械学报, 2011, 42(6):198-202. BAO Guanjun, SHAO Tiefeng, LI Shanghui, et al. Static model of flexible pneumatic swaying joint[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(6):198-202.(in Chinese) 11 CHOI T Y, LEE J Y, LEE J J. Control of artificial pneumatic muscle for robot application[C]∥IEEE 2006 International Conference on Intelligent Robots and Systems, 2006:4896-4901. 12 IWAKI M, HASEGAWA Y, SANKAI Y. Study on wearable system for daily life support using McKibben pneumatic artificial muscle[C]∥ IEEE/RSJ International Conference on Intelligent Robots & Systems, 2010:3670-3675. 13 UGURLU B, FORNI P, DOPPMANN C, et al. Torque and variable stiffness control for antagonistically driven pneumatic muscle actuators via a stable force feedback controller[C]∥IEEE 2015 International Conference on Intelligent Robots and Systems, 2015:1633-1639. 14 隋立明, 王祖温, 包钢. 气动肌肉的刚度特性分析[J]. 中国机械工程, 2004, 15(3):242-244. SUI Liming, WANG Zuwen, BAO Gang. Analysis of stiffness characteristics of the pneumatic muscle actuator[J]. China Mechanical Engineering, 2004, 15(3):242-244.(in Chinese) 15 傅晓云, 方敏, 李宝仁. 气动人工肌肉刚度特性的分析[J]. 机床与液压, 2007, 35(2):109-111. FU Xiaoyun, FANG Min, LI Baoren. Theoretic analysis of stiffness characteristics of the pneumatic muscle actuator[J]. Machine Tool & Hydraulics, 2007, 35(2):109-111.(in Chinese) 16 刘延斌, 李志松, 底复龑. 基于气动人工肌肉变刚度并联减振系统模型及特性研究[J]. 液压与气动, 2013(11):52-56. LIU Yanbin, LI Zhisong, DI Fuyan. The model and characteristics research of variable stiffness parallel vibration system based on pneumatic artificial muscle[J]. Chinese Hydraulics & Pneumatics, 2013(11):52-56.(in Chinese) 17 朱笑丛. 气动肌肉并联关节高精度位姿控制研究[D]. 杭州:浙江大学, 2007. ZHU Xiaocong. Research on the high precision posture control of parallel manipulator driven by pneumatic muscles[D]. Hangzhou: Zhejiang University, 2007.(in Chinese) 18 CHOU C P, HANNAFORD B. Static and dynamic characteristics of McKibben pneumatic artificial muscles[C]∥Proceedings of IEEE International Conference on Robotics and Automation, 1994,1:281-286. 19 NEPPALLI S, JONES B A. Design, construction, and analysis of a continuum robot[C]∥2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2007: 1503-1507. 20 TSAGARAKIS N, CALDWELL D G, MEDRANO-CERDA G A. A 7-DOF pneumatic muscle actuator (PMA) powered exoskeleton[C]∥Proceedings of IEEE International Workshop on Robot and Human Interaction, 1999:327-333. 21 DEYLE T. Amoeba-like whole-skin locomotion robots ooze right on by[EB/OL] (2010-02-10)[2016-09-01].http:∥www.hizook.com/blog/2010/01/31/amoeba-whole-skinlocomotion-robots-ooze-right. Analysis of Stiffness Characteristics of Soft Arm XIANG Chaoqun HAO Li’na ZHANG Ying GUO Shaofei LI Cunfeng (SchoolofMechanicalEngineeringandAutomation,NortheasternUniversity,Shenyang110819,China) Soft robot arm driven by pneumatic artificial muscles can possess the ability of high ratio of power to weight, important for performance and light weight, and a vital component of the inherent safety approach to physical human-robot interaction. One of the main drawbacks of pneumatically actuated soft arm is that their stiffness cannot be varied independently from their position in space. Based on these reasons, a novel variable stiffness soft robotic arm composed of both three contractile and one extensor pneumatic artificial muscles was presented. This arm combined the light weight, high ratio of power to weight and robustness of pneumatic actuation with the adaptability and versatility, and stiffness can be adjusted independently of its length. Experiment platform of single contractile and extensor pneumatic artificial muscles was setup, and the static characteristic was identified for contractile and extensor pneumatic artificial muscles through quasi-static experiments. By using the least square method, the relational model of pressure, distance and stiffness for single contractile and extensor pneumatic artificial muscles was established. In order to analyze the stiffness characteristic of this arm, stiffness model of the designed soft arm was established. Stiffness experiment platform of this soft arm was setup. Experiment data was compared with theoretical model, and they possessed the same trend, the mean relative error was 3.60%, and the maximum relative error was 6.17%. soft robot; expansive PAM; contractile PAM; static stiffness model; experiment 10.6041/j.issn.1000-1298.2017.06.054 2016-09-21 2016-10-10 国家自然科学基金面上项目(61573093)、国家高技术研究发展计划(863计划)项目(2015AA042302)和中央高校基本科研业务费专项资金项目(N150308001) 项超群(1986—),男,博士生,主要从事软体机器人研究,E-mail: 23476614@qq.com 郝丽娜(1968—),女,教授,博士生导师,主要从事机器人建模与智能控制研究,E-mail: haolina@me.neu.edu.cn TP242.3 A 1000-1298(2017)06-0407-06

3 实验验证

4 结论
