农田二氧化碳浓度梯度原位同步测量系统优化设计与试验
2017-06-27陈宝林赵新学张海淑
李 扬 陈宝林 赵新学 张海淑 王 侃 苑 进
(1.山东农业大学机械与电子工程学院, 泰安 271018; 2.山东省园艺机械与装备重点实验室, 泰安 271018)
农田二氧化碳浓度梯度原位同步测量系统优化设计与试验
李 扬1,2陈宝林1赵新学1,2张海淑1王 侃1苑 进1,2
(1.山东农业大学机械与电子工程学院, 泰安 271018; 2.山东省园艺机械与装备重点实验室, 泰安 271018)
为准确测量农田近地层二氧化碳浓度梯度分布,降低人为测量所产生的干扰误差,设计了一种二氧化碳浓度梯度原位同步测量系统。该系统由机械采集模块和系统控制模块组成,机械采集模块负责采集气体,系统控制模块实现二氧化碳浓度的自动测量,测量系统在农田中自动进行二氧化碳浓度梯度分布的测量,并采用无线传输技术将测量数据发送至服务器。阐述了测量系统的总体结构以及各模块设计方法,运用Fluent软件模拟了二氧化碳测量的抽气过程,分析优化了测量管路间隔与抽气速度、管道直径的关系,并进行了测量系统室内标定和现场二氧化碳浓度测量试验。试验结果表明,该系统能够较好地测量农田二氧化碳浓度梯度的分布,测量误差不大于4.17%,实现了农田信息的自动获取,对二氧化碳碳汇信息计算具有重要意义。
农田; 二氧化碳; 浓度梯度测量; 原位同步测量
引言
二氧化碳(CO2)是植物光合作用的主要原料,是农作物进行碳汇的主要途径。农田二氧化碳浓度的监控与测量对于农情信息采集、农田碳汇、二氧化碳施肥[1-4]、提高作物产量具有重要意义。
近地层二氧化碳浓度梯度观测作为农田二氧化碳浓度测定的重要组成部分,是通过对同一地点不同高度分别进行二氧化碳浓度测量得出的浓度梯度分布。目前观测方法有2种:一种是用几台测试仪在不同高度同时进行观测;另一种是一台仪器工作,按时在各个高度迅速采样,分别测出不同高度空气中二氧化碳浓度。上述2种方法各有利弊:前者测量准确,但成本较高,不适于大面积农田使用;后者成本较低,但易受采样者呼出二氧化碳及气体扰动的影响,且资料不连续、难同步,观测高度也受限制。目前有关植物冠层二氧化碳浓度梯度分布测量仪器的研究较少,大多是关于二氧化碳测量模块的研究。田桥等[5]设计了一种CZ型六通道气体采样自动转换器;李正雷等[6]用拉曼激光雷达探测对流层二氧化碳浓度分布;李媛等[7]研制了一种基于MSP430单片机的二氧化碳测量系统;王萍[8]设计了一种海洋原位二氧化碳检测系统。
现有方法均较难避免人为干扰,多数系统不具备梯度分布测量,一般需要人工读数,无法进行实时数据采集和远程监控。为减小测量过程中人为因素干扰,实现农田实时二氧化碳浓度梯度远程监测,本文基于STM32F103控制器和GPRS通讯技术,进行二氧化碳浓度梯度分布原位同步测量系统的研究。
1 测量系统参数设计
二氧化碳浓度梯度分布原位同步测量系统如图1所示,包括气体机械采集模块和系统控制模块两部分。
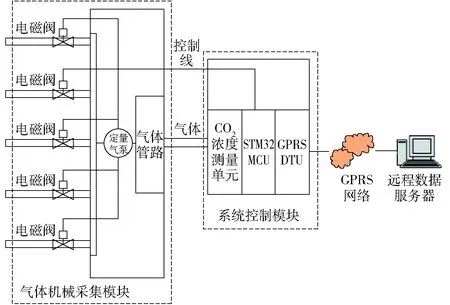
图1 测量系统架构图Fig.1 Structure diagram of system
气体机械采集模块主要由微型气泵、直动式二位三通电磁阀和气体管路组成,有5条支路,用于气体的暂时存储和独立测量。系统控制模块包括二氧化碳浓度测量单元、STM32微控制器及GPRS DTU,用于控制泵阀组并与远程数据服务器进行通信。此外,气体管路几何结构、微气泵工作时间、待测二氧化碳体积以及抽气过程中微气泵的压力变化等参数均对系统测量精度有影响,有必要对测量系统气体采集模块的主要参数和浓度测量值进行设计与补偿计算。
1.1 气体机械采集模块参数设计
设二氧化碳测量模块响应时间为T,微型气泵提供的额定流量为Q,支路总数为N,二氧化碳浓度测量所需最小体积为QT,每根长导气管内从外界抽入的待测气体体积为V。为满足测量需求,抽入管内气体应留有余量,选取导气管中暂存气体中间部分参与测量,设参与测量的气体体积为V0(V>V0>QT),则导管两端的气体余量为(V-V0)/2,设计参数计算式为
l=4V/(πd2)
(1)
t1≥V/Q
(2)
t2=πd2L/(4Q)+(V-V0)/(2Q)
(3)
t3=V0/Q
(4)
式中d——长导气管直径,ml——长导气管长度,mL——干路气管长度,mt1——同时开启所有微型气泵进行抽气的工作时间,s
t2——开启每个支路时微型气泵工作时间,s
t3——测量模块工作时间,s
1.2 气体测量浓度补偿计算
微型气泵抽气时会导致气体压力增大,且在气体流动中产生压力损失,压力变化会直接导致浓度测量误差。因此有必要对气体流动中的压力进行计算,对浓度变化进行补偿。补偿计算式为
p′=p-pl-Z
(5)
其中
(6)
(7)
vd=4Q/(πd2)
(8)
vD=4Q/(πD2)
(9)
式中p′——二氧化碳测量模块中的气室气压p——气体出口风压pl——沿程压力损失Z——局部压力损失(主要为气体进入气室时的突扩损失)
vd——管道中气体流速
vD——气室中气体流速
D——气室直径ρ——空气密度
λ——沿程阻力系数
ξ——局部阻力系数
根据式(5)~(9)即可计算出气室中气体的压力,然后根据气体的压缩原理和道尔顿分压原理可知
(10)
由此可得
(11)
式中ρ0——补偿计算后的二氧化碳浓度p0——标准状态下的大气压力ρ′——未补偿时测得的二氧化碳浓度
2 气体机械采集模块参数优化设计
在系统抽气测量时,不同层位的气体流动情况对系统二氧化碳浓度测量精度影响较大,因此有必要对系统微气泵抽气过程中测量空间的气体流动情况进行仿真分析,研究不同参数组合条件下气体的流动特性,为气体机械采集系统设计提供参考。
2.1 仿真模型建立
二氧化碳抽气模型网格划分在GAMBIT软件中完成,根据装置实际结构将模型简化为二维模型,取抽气管路中心的纵切面为研究对象。为保证计算精度,采用分区组合生成网格的技术,将整个模型分成抽气管路和流动区域两部分进行网格划分,为排除计算网格的影响,对几种不同尺度的网格进行对比,最终采用的网格总数为3万个,网格划分模型如图2所示。
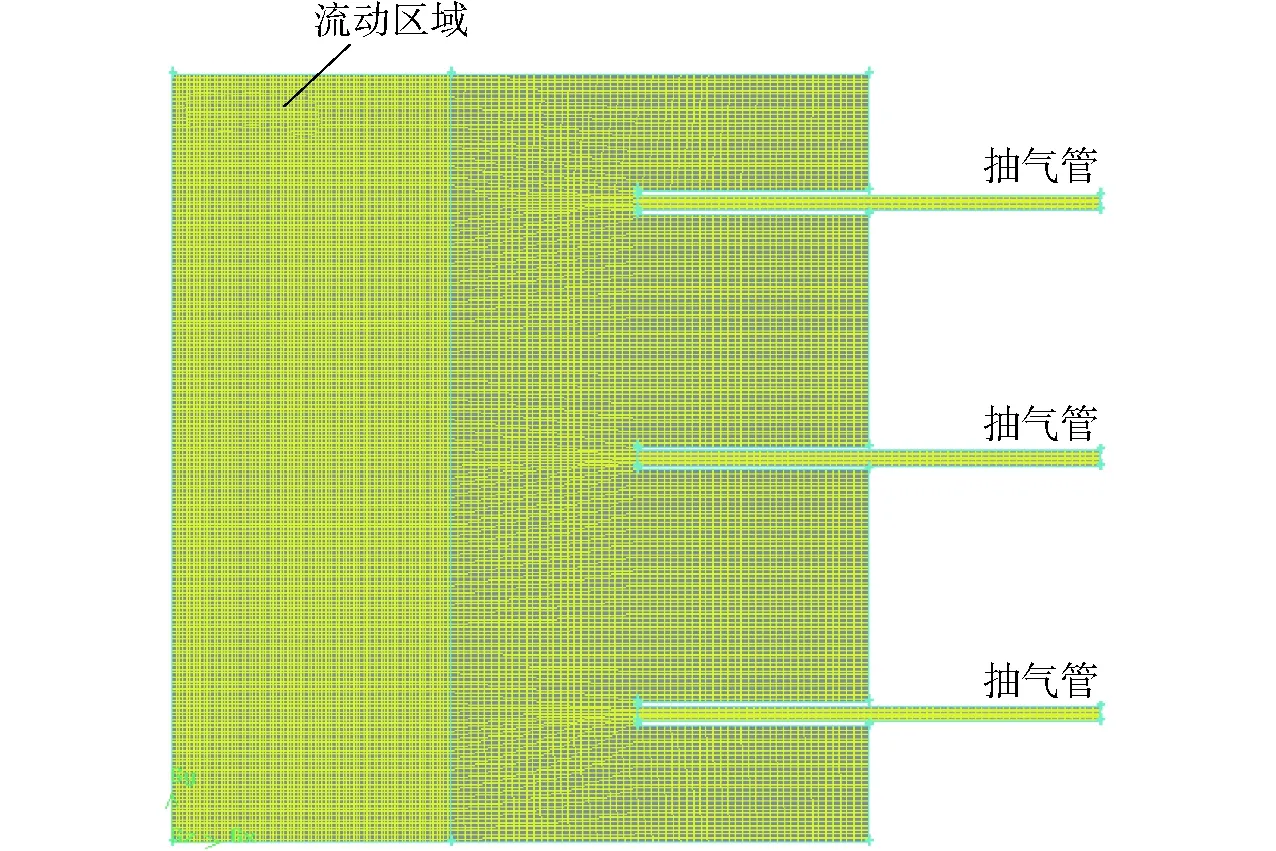
图2 网格划分模型Fig.2 Mesh split model
计算过程中流体为常温状态下的空气,考虑到作物生长后期枝叶较茂密,假设在作物群体内部空气流动速度较低。在设置边界条件时,计算模型左侧为压力进口,右侧除抽气管路外均为压力出口,上下两侧设为对称边界,抽气管路为速度入口,考虑管路实际抽气情况,设置速度与抽气速度大小相等,方向相反。
图3分别为抽气管间隔50 mm、抽气速度0.5 m/s和抽气管间隔200 mm、抽气速度3 m/s下测量空间气体的流动迹线,从图中可以看出,在抽气管直径一定的条件下,抽气管间隔过小或抽气速度过大时,测量空间不同层位气体流动会出现相互干扰和窜流问题,同时出流口有回流现象,破坏测量空间气体流动的稳定性。因此,导气管间隔、抽气速度、抽气管直径等参数设计不合理,容易使气体产生扰动,严重影响系统二氧化碳浓度测量的精度,因此仍需对不同抽气速度和抽气管直径组合下的气体流动特性进行分析,确定抽气管合理的布置间隔及抽气管直径。
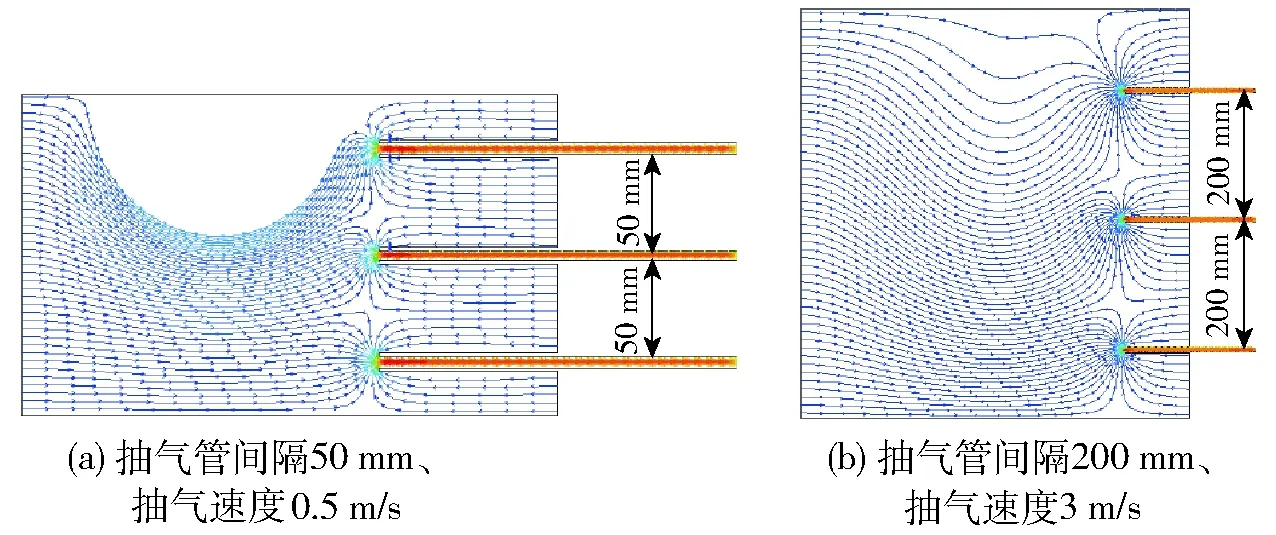
图3 测量空间气体流动迹线图Fig.3 Airflow traces of measure space
2.2 仿真结果分析
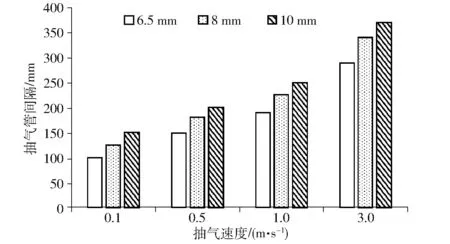
图4 抽气速度与抽气管间隔的关系Fig.4 Relationship between pumping speed and pipe spacing
图4为不同抽气管道直径下抽气速度与抽气管间隔之间的对应关系,由图可以看出,在相同的抽气管道直径下,随着抽气速度的增加,抽吸流量增加,为避免相邻管道之间气流的相互干扰,所需抽气管道间隔增大;在相同的抽气速度下,随着抽气管道直径的增加,抽吸流量也增加,所需抽气管道间隔也将增大。
根据上述结论,当抽气速度为0.5 m/s、抽气管道直径为6.5 mm时,管道布置间隔应大于250 mm。由图5设计工况下的气流迹线可以看出,当管道布置间隔大于250 mm时,气流流动相对比较平稳,两管道之间有部分气流经出流口流出,未出现不同层位管道之间气体窜流和压力出口处的气体回流现象,对二氧化碳浓度的测量精度影响较小。因此,在抽气速度和抽气管道直径固定的情况下,管道布置间隔有最小值,当管道布置间隔大于最小值时,对不同层位二氧化碳浓度的测量不会产生影响。

图5 设计工况下的气流迹线Fig.5 Airflow traces under design condition
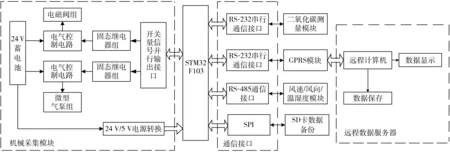
图7 控制系统原理图Fig.7 Principle diagram of control system
3 测量系统设计
3.1 机械采集模块
气体机械采集结构如图6所示,主要由微型气泵、直动式二位三通电磁阀和导气管组成,设计5条支路。每条支路分别由导气管、二位三通电磁阀和微型气泵组成。导气管分为长导气管、短导气管和连接导气管,长导气管一端安装鹅颈弯管并接通到大气中,鹅颈弯管可以防止气体交换,长导气管另一端连接在二位三通电磁阀的进气口上,长导气管与二位三通电磁阀之间安装微型气泵,短导气管和连接导气管一端分别连接在二位三通电磁阀的2个出气口上,短导气管另一端连接大气,连接导气管另一端连接在多通接头上;各个支路的连接导气管通过一个多通接头连接在干路气管上。工作原理是通过泵阀的操作泵取同一位置不同高度的气体进入长导气管暂存,再通过二位三通阀跳转使长导气管内的气体依次进入测量仪进行数据测量。

图6 机械采集结构图Fig.6 Mechanical structure diagram of acquisition1.鹅颈弯管 2.导气管 3.出气口 4.微型气泵 5.电磁阀 6.多通接头
3.2 系统控制模块
系统控制模块如图7所示,由主控芯片、通信接口、继电器模块、GPRS模块外围电路等组成。主控芯片是系统核心部分,选择STM32F103,主要用于控制继电器工作及与其他模块通信[9-12]。
为满足测量位置环境数据采集的需要,通信接口主要实现控制器与二氧化碳测量模块、DTU以及温度风速风向等外围传感器的通信,接口类型有RS-232、RS-485及SPI接口[13-16],整个系统由24 V蓄电池供电。
3.3 工作与控制流程
测量系统控制流程如图8所示,工作过程如下:
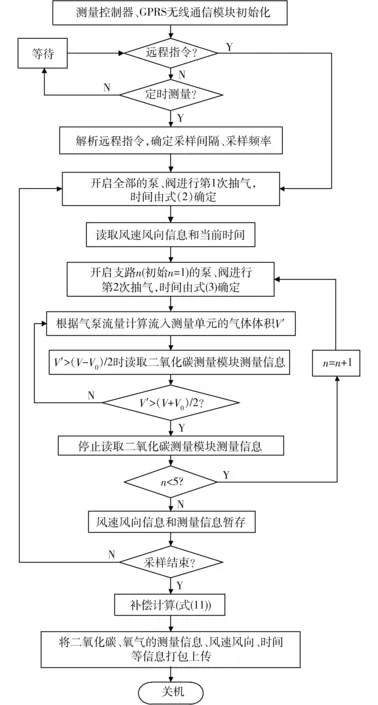
图8 控制系统流程图Fig.8 Flow chart of control system
(1)工作前,切换所有二位三通电磁阀工作位置,使各支路长导气管与短导气管连通,同时开启所有微型气泵进行抽气,开启一定时间(t1≥V/Q)后同时关闭所有微型气泵,此时,长导气管内布满了从外界抽入的待测气体,长导气管起到暂时储气的作用。抽气完成后读取当前风速风向信息。
(2)切换支路1的二位三通阀位置,使支路1与干路气管连通,开启支路1的微型气泵将支路1中长导气管内的气体泵入二氧化碳浓度测量模块进行浓度测量。测量控制器通过气体质量流量控制器对流入二氧化碳测量模块的气体体积V′进行计算,当V′>(V-V0)/2时,测量控制器开始读取二氧化碳测量模块数值,当V′>(V+V0)/2时,停止读取。
(3)同时切换支路1和支路2的二位三通电磁阀位置,使支路1与干路气管断开,支路2与干路气管连通,开启支路2的微型气泵对支路2长导气管内的气体按照步骤(2)中所述方法进行测量,测量完成后,同时切换支路2和支路3的二位三通阀位置,对支路3长导气管中的气体进行测量,以此类推,分别测定所有支路中气体的二氧化碳浓度。
在测量系统中可以接收远程指令,若接收到远程指令,控制系统则对指令进行解析,获取测量时间间隔等信息,并按照远程指令信息设定执行程序。若未接收到远程指令,系统按照内置固定时间间隔进行定时测量。为避免管路中残留气体对测量结果产生影响,测量时首先打开所有气泵将外界气体泵入长导气管,排空原气体并将新气体在管内暂存,然后每个支路的电磁阀和气泵工作,将每个支路暂存的气体依次泵入二氧化碳测量模块,读取模块数据。测量完成后对数据进行补偿计算同时读取外接传感器的信息,所有信息读取完成后将二氧化碳信息和传感器获取的环境信息发送至上位机,即完成一次测量。
4 测量系统试验与分析
4.1 室内标定试验
为验证仪器测量的准确性,利用已知浓度二氧化碳气体进行标定,考察仪器各项参数是否合理并进行修正,优化测量仪器以实现对外界气体的准确测量。
在标定试验中制作了5个体积为1.5 L的密封气箱(图9),气箱两侧安装进气孔和出气孔, 5个密封气箱内分别注入不同浓度梯度的二氧化碳气体,分别将密闭气箱的进气口和出气孔接到二氧化碳测量仪的出气孔和进气口进行测量,考虑测量误差,测量时对每个试验箱进行3次测量并取平均值作为标定数据。
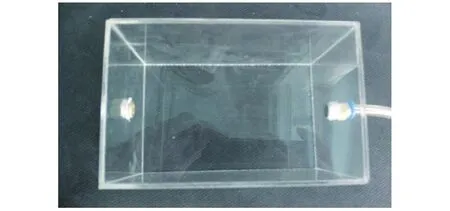
图9 试验标定箱Fig.9 Experimental calibration box
由表1可知,每个标定箱均值分别为0.055 1%、0.079 5%、0.119 5%、0.179 4%、0.203 1%(0.203 6%为所选用测量传感器的最大量程)。对气箱进行标定后将5个气箱分别接入测量装置的5个长导气管末端,测量结果如表2所示。
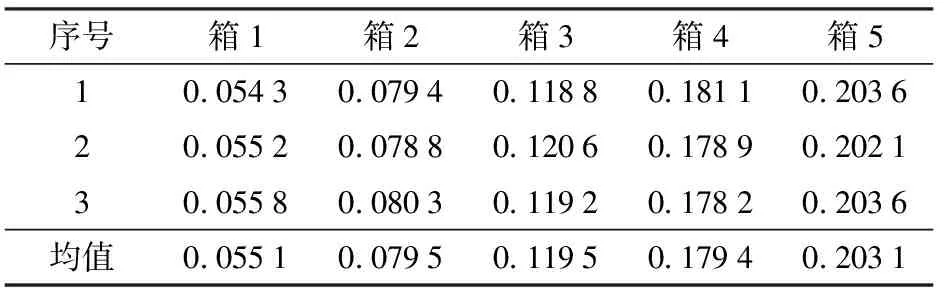
表1 标定数据
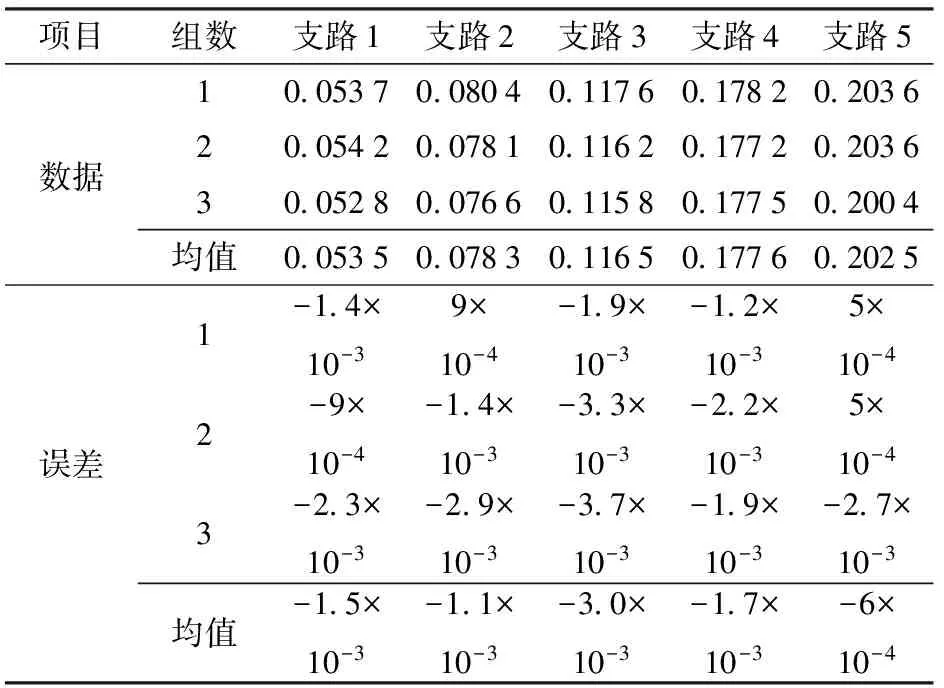
表2 室内试验数据
表2数据显示:通过对3组固定浓度密封气箱的测量,各个支路均值误差分别为2.72%、1.38%、2.51%、0.95%、0.30%,其中测量数据的最高误差为4.17%,测量结果准确性较高。
4.2 农田实地测量
农田实地测量将仪器放置在农田实地环境中,进一步观察测量结果及观察各传感器的工作状况。试验环境如图10所示,试验对象为抽穗期玉米,装置安放在田间的测量高度分别为0、0.6、1.2、1.8、2.4 m。对试验结果进行统计,绘制各梯度二氧化碳浓度随时间变化曲线如图11所示。分析在24 h内不同垂直高度上二氧化碳浓度的变化情况。

图10 试验现场Fig.10 Experiment scene
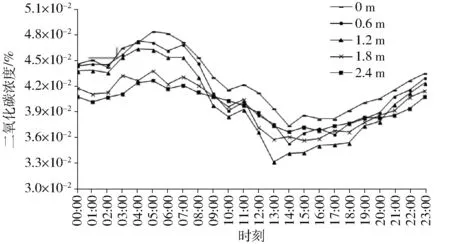
图11 二氧化碳浓度随时间变化曲线Fig.11 Curves of CO2 concentration changes with time
分析结果表明,在实地测量中发现农田中二氧化碳浓度随梯度发生明显变化。在农田环境中,由于土壤呼吸作用释放二氧化碳,作物底部地表附近的二氧化碳浓度最高,作物顶部二氧化碳浓度与外界浓度相同,作物冠层二氧化碳浓度变化与时间相关,在21:00—08:00,二氧化碳浓度随高度升高呈递减趋势,而在09:00—20:00,二氧化碳浓度随高度升高先降低后升高,在1.2 m处达到最低。出现上述变化的原因是夜晚土壤呼吸产生的二氧化碳较多,植物冠层呼吸产生的二氧化碳较少,因此出现二氧化碳随高度增加而逐级递减的情况。而在白天仍然是土壤呼吸占据主导作用,植株底部产生大量二氧化碳,而植株中部由于光合作用的存在,吸收了大量的二氧化碳,植株中部二氧化碳浓度降低较为明显。
在图11中,曲线总体呈现波动变化的趋势,二氧化碳浓度最高值出现在04:00—08:00,最低值出现在12:00—15:00,出现上述变化主要是由植物光合作用和呼吸作用导致的,04:00—08:00植物呼吸累积了大量二氧化碳,在12:00—15:00时由于光合作用吸收了大量二氧化碳,所以呈现如图11所示变化。其中1.2 m处二氧化碳浓度变化最为剧烈,而2.4 m处二氧化碳浓度变化较为平缓。
5 结论
(1)本测量系统采用自动控制技术与无线数据传输技术相结合,在田间安装后能进行二氧化碳浓度测量,按照设定时间间隔或手动将测量数据发送至远程数据服务器,测量操作简便。
(2)由仿真结果可知,随着抽气速度和管道直径的增加,抽吸流量增加,为避免相邻管道之间气流相互干扰,所需抽气管道间隔增大,当抽气速度为0.5 m/s、抽气管道直径为6.5 mm时,管道布置间隔应大于250 mm。
(3)基于STM32F103的二氧化碳浓度测量系统可以通过泵阀的操作,同时抽取外界不同环境下的气体,暂存在导气管内分时进行测量,并经过补偿计算,测量误差不大于4.17%,能够准确进行二氧化碳浓度梯度测量。
(4)通过本系统可以实时远程观测农田二氧化碳浓度梯度变化,了解农田环境信息,对二氧化碳碳汇信息计算具有重要意义。
1 王红玉,曲英华,周士力,等.CO2增施与养分交互作用对日光温室番茄生长的影响[J/OL].农业机械学报,2014,45(增刊):182-188.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2014s129&flag=1.DOI:10.6041/j.issn.1000-1298.2014.S0.029. WANG Hongyu, QU Yinghua, ZHOU Shili, et al. Interactive effect of CO2enrichment and nutrient on growth of tomato in solar greenhouse[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(Supp.):182-188. (in Chinese)
2 郑智旗,王树东,何进,等.耕作措施对京郊冬小麦农田CO2、CH4排放通量的影响[J/OL].农业机械学报,2014,45(增刊):189-195. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2014s130&flag=1. DOI:10.6041/j.issn.1000-1298.2014.S0.030. ZHENG Zhiqi, WANG Shudong, HE Jin, et al. Influences of tillage methods on carbon dioxide and methane fluxes from winter wheat fields in Beijing’s suburb[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(Supp.):189-195. (in Chinese)
3 毕玉革,麻硕士,崔红梅,等.北方干寒地区日光温室CO2预测模型建立与冬季试验[J].农业机械学报,2010,41(12):183-189. BI Yuge, MA Shuoshi, CUI Hongmei, et al. Forecasting model of CO2concentration of solar greenhouse in the northern drought cold area and experimental verification in winter[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(12):183-189. (in Chinese)
4 宋秋来,赵泽松,龚振平,等.东北黑土区旱作农田土壤CO2排放规律[J].农业工程学报,2012,28(23):200-207. SONG Qiulai, ZHAO Zesong, GONG Zhenping, et al.CO2emission law of dry farmland soil in black soil region of Northeast China[J]. Transactions of the CSAE,2012,28(23):200-207. (in Chinese)
5 田桥,仝乘风.CZ型六通道气体采样自动转换器[J].农业气象,1984(4):51,63.
6 李正雷,范广强,胡顺星,等. 拉曼激光雷达探测对流层二氧化碳浓度分布[J].科技信息,2012(16):149-150. LI Zhenglei, FAN Guangqiang, HU Shunxing, et al. Detection of carbon dioxide concentration in troposphere by Raman [J]. Science and Technology Information, 2012(16):149-150. (in Chinese)
7 李媛,王太宏,项莹莹. 基于MSP430单片机的二氧化碳测量系统[J]. 微计算机信息,2009(23):6-7. LI Yuan, WANG Taihong, XIANG Yingying. Carbon dioxide measurement system based on MSP430 single chip microcomputer [J]. Microcomputer Information, 2009(23):6-7. (in Chinese)
8 王萍.海洋原位二氧化碳检测系统的设计[D] .杭州:浙江大学,2013. WANG Ping. Design of in-situ carbon dioxide detection system [D]. Hangzhou:Zhejiang University, 2013. (in Chinese)
9 陈天华,唐海涛.基于ARM和GPRS的远程土壤墒情监测预报系统[J].农业工程学报,2012,28(3):162-166. CHEN Tianhua, TANG Haitao. Remote monitoring and forecasting system of soil moisture based on ARM and GPRS [J].Transactions of the CSAE,2012,28(3):162-166. (in Chinese)
10 王双喜,高昌珍,杨存栋,等.温室CO2气体浓度环境自动调控系统的研究[J].农业工程学报,2002,18(3):84-86. WANG Shuangxi, GAO Changzhen, YANG Cundong, et al. Auto-controlling system of CO2concentration in modernized greenhouse [J]. Transactions of the CSAE,2002,18(3):84-86. (in Chinese)
11 王志平,程韬波. 基于GPRS的远程无线监控系统的数据中心设计[J]. 工业控制计算机,2005,18(3):3-4. WANG Zhiping, CHENG Taobo. Design of data center for remote wireless monitoring system based on GPRS [J]. Industrial Control Computer, 2005,18(3):3-4.(in Chinese)
12 张海辉,邵志成,张佐经,等. 基于无线传感网的设施二氧化碳精准调控系统[J/OL]. 农业机械学报,2017,48(3):325-331,360. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170341&flag=1. DOI:10.6041/j.issn.1000-1298.2017.03.041. ZHANG Haihui, SHAO Zhicheng, ZHANG Zuojing, et al. Regulation system of CO2in facilities based on wireless sensor network[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2017,48(3):325-331,360. (in Chinese)
13 秦琳琳,陆林箭,石春,等.基于物联网的温室智能监控系统设计[J/OL].农业机械学报,2015,46(3):261-267.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150338&flag=1. DOI:10.6041 /j.issn.1000-1298.2015.03.038. QIN Linlin, LU Linjian, SHI Chun, et al. Implementation of IOT-based greenhouse intelligent monitoring system[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(3):261-267. (in Chinese)
14 曹柏荣,谢东晓.二氧化碳浓度的测量与控制[J].仪表技术,2006(1):54-56. CAO Borong, XIE Dongxiao. Measurement and control of carbon dioxide concentration [J]. Instrumentation Technology, 2006(1):54-56.(in Chinese)
15 单慧勇,崔靖林,赵辉,等. 基于Arduino的温室二氧化碳气肥增施控制系统设计[J]. 北方园艺,2015(2):40-42. SHAN Huiyong, CUI Jinglin, ZHAO Hui, et al. Design of control system for carbon dioxide gas fertilizer application in greenhouse based on Arduino [J]. Northern Horticulture, 2015(2):40-42.(in Chinese)
16 李少华,谢守勇,陈翀,等. 基于单片机控制的温室二氧化碳调控系统设计[J]. 农机化研究,2013(6):178-181. LI Shaohua, XIE Shouyong, CHEN Yu, et al. Design of carbon dioxide control system in greenhouse based on single chip microcomputer [J]. Journal of Agricultural Mechanization Research, 2013(6):178-181.(in Chinese)
Optimal Design and Experiment of Farmland Carbon Dioxide Concentration Gradient In-situ Synchronous Measuring System
LI Yang1,2CHEN Baolin1ZHAO Xinxue1,2ZHANG Haishu1WANG Kan1YUAN Jin1,2
(1.SchoolofMechanicalandElectronicEngineering,ShandongAgriculturalUniversity,Taian271018,China2.ShandongProvincialKeyLaboratoryofHorticulturalMachineryandEquipment,Taian271018,China)
In order to measure the distribution of carbon dioxide (CO2) concentration gradient in farmland accurately, and reduce the interference error caused by manual measurement, a CO2concentration gradient in-situ synchronous measurement system was designed, which was equipped in farmland to measure CO2concentration gradient automatically, and the measurement data could be sent to the host computer server via GPRS wireless transmission technology. The system was composed of a mechanical collection module and an electrical control module. The mechanical acquisition module was responsible for the gas collection, and the system control module was used to realize the automatic measurement of CO2concentration. The overall structure of the measurement system and the design of each module were introduced, and the pumping process of carbon dioxide measurement was simulated by computational fluid dynamics (CFD) software. The relationships between the distance of the measurement pipeline and the pumping speed, as well as the diameter of the pipeline were analyzed to optimize the system design. The indoor system calibration and outdoor field measurement of carbon dioxide concentration were implemented. The experimental results showed that the system could measure the concentration gradient of farmland carbon dioxide, and the measurement error was not more than 4.17%. The system could realize the automatic acquisition of cropland information, which had important significance to the carbon sequestration information calculation.
farmland; carbon dioxide; concentration gradient measurement; in-situ synchronous measurement
10.6041/j.issn.1000-1298.2017.06.018
2016-10-17
2016-11-18
国家自然科学基金项目(51475278)、国家高技术研究发展计划(863计划)项目(2013AA102301)、山东省农业重大应用技术创新课题和山东省农机装备研发创新计划项目(2015YB201)
李扬(1982—),男,讲师,博士,主要从事嵌入式系统设计和智能控制方法研究,E-mail: mtlyab@sdau.edu.cn
苑进(1972—),男,教授,博士,主要从事智能机电控制技术研究,E-mail: jyuan@sdau.edu.cn
S163+.5; P463.2
A
1000-1298(2017)06-0138-07
