车载组合导航在阵地勘测中的应用设计*
2017-06-27刘建许友哲贾军强
刘建,许友哲,贾军强
(北京电子工程总体研究所,北京 100854)
车载组合导航在阵地勘测中的应用设计*
刘建,许友哲,贾军强
(北京电子工程总体研究所,北京 100854)
为提高阵地勘测的连续性、精确性和快速性,提高定位定向车阵地勘测的环境适应性,在定位定向车阵地勘测中首次利用卡尔曼滤波算法进行数据融合的组合导航,综合捷联惯组、速率计和高程计的自主性以及北斗2卫星导航的精确性和快速性,通过定位定向车多批次的跑车试验验证,该设计实现了较高的阵地勘测连续性以及精确性,基本实现全区域的无缝定位导航阵地勘测。
BD2;SINS;速率计;高程计;组合导航;阵地勘测
0 引言
地空导弹作为一种精确制导防空武器,在机动过程中为了保证兵器投入正常使用需进行阵地勘测[1]。定位定向车是我国第3代地空导弹武器系统中的主战装备之一,它担负着阵地测量、武器系统标定、引导武器系统机动作战等任务[2],在定位定向车前期阵地勘测设计过程中,关注的重点一直是通过各种理论和应用技术来提高定位定向精度,利用准确的位置信息在阵地勘测过程中,通过军图实现行军路线勘测和规划[3]。对于阵地勘测领域,勘测的准确性和连续性即环境适应性,是2个主要指标[4]。本文在原定位定向车捷联惯组和北斗2卫星导航设备基础上,根据底盘状态设计速率采集方式,引入北斗双天线定向提供快速方位基准,采用最新的数据融合技术,替代原先相对独立工作方式,以捷联惯组输出的定位数据为主,利用北斗2卫星导航数据进行组合输出,以提高阵地勘测的连续性。
1 SINS/速率计/高程计组合
捷联惯组、速率计和高程计具有无依托测量自主性好的特点,它的工作原理建立在牛顿运动定律之上[5]。高程计通过测量大气压强,计算出高程变化值,通过串行口将高程数据发送给激光捷联惯组,速率计拾取载车车轮转速,形成脉冲,发给激光捷联惯组,激光捷联惯组定时计数,换算出载车的实时速度,根据测量的姿态,将速度分解到东西、南北方向,积分得到东西、南北方向载体移动的距离,实现惯性定位、捷联惯组、速率计和高程计之间的线缆连接如图1所示。
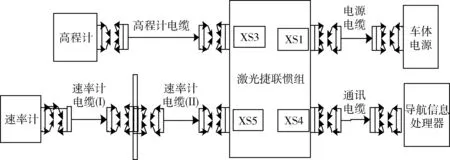
图1 惯组、高程计和速率计连接示意图Fig.1 Linking map of the SINS, speedometer and altimeter
定位定向车目前采用底盘有北奔和依维柯,北奔底盘变速箱上有专门的速率拾取口,通过软轴与底盘的变速箱速率拾取口相连拾取车轮转速,转化为脉冲信号,发送给捷联惯组,速率计外形如图2所示。

图2 速率计外形图Fig.2 Speedometer profile
依维柯底盘变速箱上没有多余的速率拾取口,为拾取底盘速率信号,在底盘分动箱上安装霍尔传感器,传动轴上新加一齿轮,当传动轴转动的时候,霍尔传感器可以敏感到齿轮转动,转换成脉冲信号,发送给捷联惯组,依维柯底盘速率拾取装置如图3所示。

图3 依维柯底盘速率拾取装置Fig.3 Iveco chassis speed pickup device
SINS/速率计/高程计组合根据惯组提供的航向角和俯仰角采用航位推算算法,利用姿态、方位和里程信息实时推算车辆相对于起始点的东向和北向位移[6],利用高程计敏感的气压变化值结合曲率半径算法,推算出车辆位置的经纬度变化值,结合高程计输出的高程值,实时输出车辆位置的经度、纬度和高度,SINS/速率计/高程计组合导航定位原理如图4所示。

图4 SINS/速率计/高程计组合导航定位原理图Fig.4 Positioning principle diagram of integrated navigation of SINS/speedometer/altimeter
2 双天线北斗2卫星导航
在区域防空中,防空兵将在一个或多个战区参与抗、反一体的大纵深全区域防空作战,信息传递的快速性要求非常高[7]。定位定向车在进行阵地勘测的过程中常需进行方位传递测量,阵地勘测过程中方位测量传递要求快速,精度在1°以内,利用北斗卫星载波相位双天线定向,可以快速提供方位基准。北斗定向基本原理与GPS相似,都是利用卫星载波相位干涉测量原理来确定基线矢量在相应坐标系下表示[8]。
定位定向车北斗双天线设置如图5所示,后天线为主天线,中心指向前天线,后天线与前天线中心连线为基线,基线与定位定向车的纵轴平行。定位定向车后安装有基准面,基准面法线方向与车轴方向平行,定位定向车进行阵地勘测时可以利用基准面快速将卫星双天线所确定的方位角引出,实现阵地勘测方位的快速引出测量。在北斗双天线定向系统中,主天线除了与副天线进行载波相位差分定向之外,还负责定位测速,定位定向车位置和速度信息都是基于主天线的[9]。

图5 定位定向车北斗双天线示意图Fig.5 Schematic diagram of BD2 dual antenna of POV
3 组合导航
卫星定位系统[10]定位和测速精度高,基本不受地域和时域限制。受载体机动的影响较大,在复杂电磁环境下易受干扰和人为控制[11-12]。北斗卫星要求收到4颗星以上才能导航,所以在城市、峡谷、森林等地区,由于受遮挡卫星信号衰减或失锁,造成定位精度的下降甚至无法正常工作[13]。惯性导航系统能靠系统本身在全天候条件下,全球范围内自主地、隐蔽地提供多种较高精度的导航参数,但其位置误差随时间累计[14]。卫星和惯组组合导航综合克服各自的缺点,取长补短,利用卡尔曼滤波融合方法使卫星信息修正惯组信息,以保证较高的定位精度和定位连续性。
本文以定位定向车中惯性测量组合和北斗2差分测量设备为主进行组合导航。定位定向车原工作方式为:导航信息处理器为数据信息处理器的中心单元,北斗2差分测量设备和惯性测量组合各自把定位信息数据传到导航信息处理器,导航信息处理器中的导航软件根据设置选择采用哪个设备的数据,北斗2差分测量设备和惯性测量组合各自单独工作。导航信息处理器定时将北斗2差分测量移动站发出的位置信息装订到惯性测量设备中,以校正惯组的位置基准。惯性测量设备和北斗2差分测量设备之间没有直接数据通信,也没有通信接口。
在不更改定位定向车设备和硬件接口基础上,导航信息处理器不显示北斗2差分测量设备数据,直接将其数据传递到惯性测量设备,惯性测量设备进行组合导航计算后将组合导航数据传递给导航信息处理器,导航信息处理器直接采用组合导航后的数据,提高阵地勘测导航的连续性,定位定向车组合导航更改设计如图6所示。

图6 定位定向车组合导航工作示意图Fig.6 Schematic diagram of the integrated navigation of POV
捷联惯组和北斗2组合导航以两者各自输出测量的速度和位置为Kalman滤波器的观测量,通过滤波对惯性测量设备的误差和北斗2差分测量设备的误差进行最优估计。系统的状态方程为

(1)
惯性/北斗组合的综合滤波器是一个12维的Kalaman滤波器,导航坐标系选用东北天坐标系。状态变量X选取经度、纬度、东向速度、北向速度、3个姿态角、陀螺仪的2个漂移和3个加速度计的零漂。
(2)
量测方程为

(3)
组合导航的观测量选取位置和速度:位置观测量,通过捷联惯组系统与北斗2导航系统提供的位置信息的差值作为观测量,位置信息主要是经纬度信息。速度观测量,通过捷联惯组系统与北斗2导航系统提供的速度信息的差值作为观测量。
捷联惯组给出的位置信息:
(4)
北斗2接收机给出的位置信息:
(5)
式中:λ,L为位置的真值;NE,NN为卫星沿东、北方向的位置误差。
捷联惯组给出的速度信息:
(6)
北斗2接收机给出的速度信息:
(7)
式中:vE,vN为速度的真值;δvE,δvN为惯性导航速度误差;ME2,MN2为卫星的测速误差。
定义位置的量测方程:

(8)
定义速度测量方程:
(9)
最后得到位置和速度组合的量测方程:
(10)
组合导航软件除了应用Kalman滤波算法外还采用序贯处理技术、容错处理技术和时间同步技术等辅助手段,以保证滤波的稳定性、正确性和可靠性。组合导航软件是嵌入式实时软件,在进行导航解算、信息融合、故障检测和导航功能控制的同时,还要定时处理复杂的输入和输出。在满足定位定向指标需求的基础上,做到程序内容清晰,程序结构严谨,模块独立性强,低耦合,高内聚,以提高软件的可靠性、可维护性、可移植性和可测试性,保证软件的设计质量。组合导航软件包括控制管理模块、捷联解算模块、组合导航模块、数据I/O模块,组合导航软件框图如图7所示。
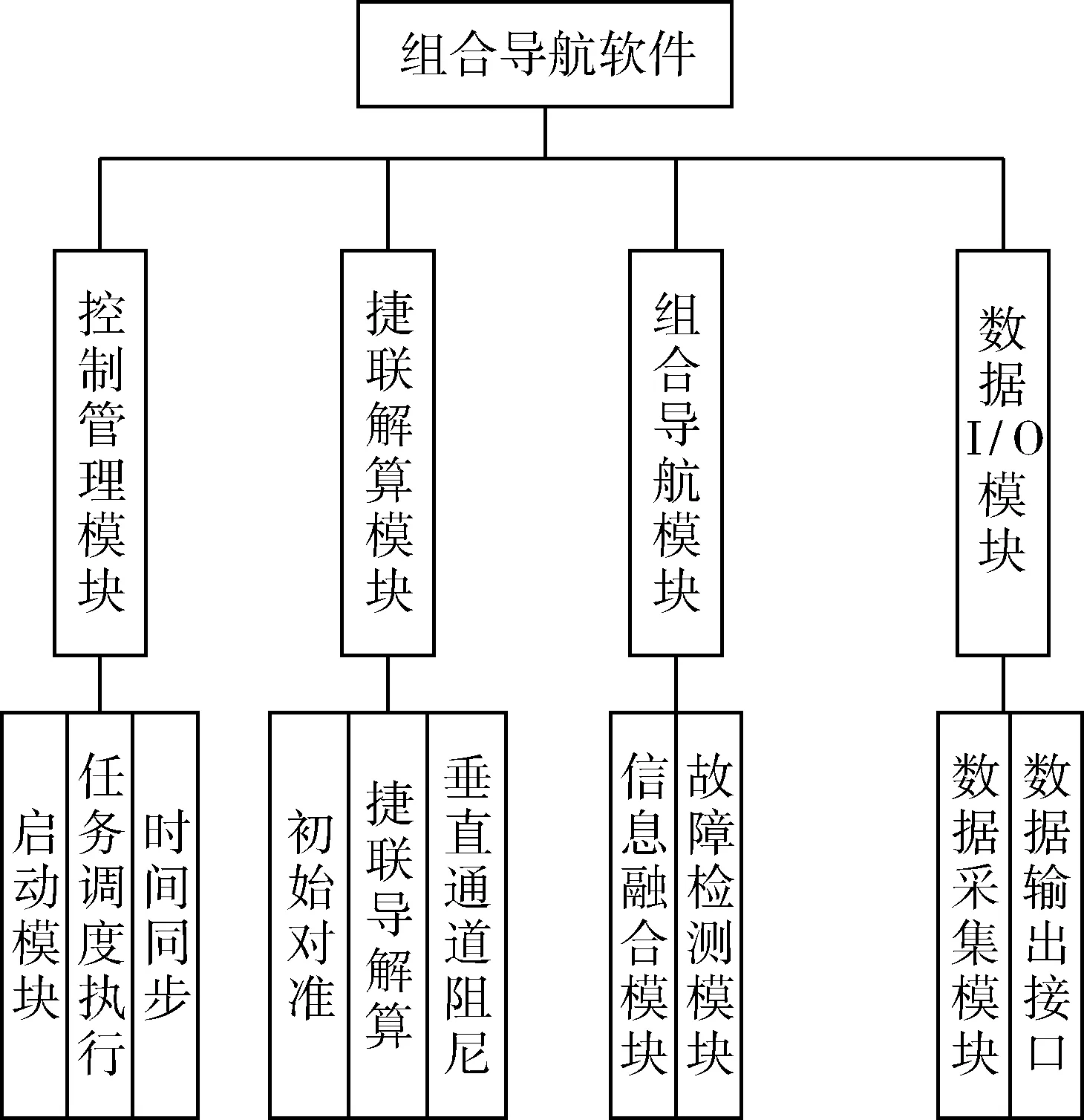
图7 组合导航软件示意框图Fig.7 Flow chart of the integrated navigation software
4 阵地勘测
定位定向车总装调试完后,在京西选择了一段含有平坦开阔的公路、林区和山路的跑车测试路线,总长近30 km。在整条跑车勘测路线上设置8个基准记录点,分别对单北斗导航和组合导航2种方式进行跑车勘测测试,行驶最大时速40 km,每种导航方式分别进行6遍跑车勘测[15],以真实实际情况对比对2种导航方式,验证组合导航对定位定向车阵地勘测导航带来的改进,分别记录每种定位模式下在基准点的的跑车数据,对记录数据与8个基准测量点进行数据分析,分析结果如图8,9所示。

图8 北斗导航测试数据Fig.8 Test data of BD navigation

图9 组合导航测试数据Fig.9 Test data of integrated navigation
通过图8,9的数据发现,单北斗导航模式下定位定向车在开到4,5,6点处时,卫星接收数据出现重大偏移,与基准点数据偏差较大,在该区域卫星信号遮挡干扰较为严重,这种状态下定位定向车阵地勘测数据出现较大偏差;组合导航模式下,定位定向车在开到4,5,6点处时,数据也出现偏差,与基准点相比,偏差在6 m以内,比北斗10 m定位精度稍有改善,验证了定位定向车在组合导航模式下,经过卫星信号受遮挡干扰的区域时,勘测数据精度满足要求。
5 结束语
本文通过在原定位定向车捷联惯组和北斗2卫星导航设备基础上,根据底盘状态设计速率采集方式,引入了基于位置和速度的卡尔曼滤波算法,通过跑车勘测试验验证组合导航有效的提高了定位定向车阵地勘测的环境适应性,在有卫星信号遮挡的区域能顺利完成阵地勘测。引入北斗双天线定向提供快速方位基准,提高了定位定向车阵地勘测方位引出的快速性。该设计对定位定向车有较大应用价值,基本实现全区域的无缝定位导航阵地勘测。
[1] 万家宁,王刚,王磊.数据融合在阵地勘测中的应用[J].计算机仿真,2008,25(11):18-20. WAN Jia-ning,WANG Gang,WANG Lei.Application of Data Fusion in Battlefield Reconnaissance[J].Computer Simulation,2008,25(11):18-20.
[2] 李国宏,曾番,夏伟鹏.基于AHP法的地形联测车作战效能评价[J].战术导弹技术,2010(6):56-69. LI Guo-hong,ZENG Fan,XIA Wei-peng.Operational Efficiency Evaluation of Landform Survey Vehicle Based on VHP[J].Tactical Missile Technology,2010(6):56-69.
[3] 康红霞,李国宏,曾番.4D产品在地型联测中的应用探讨[J].弹箭与制导学,2010,30(6):193-194. KANG Hong-xia,LI Guo-hong,ZENG Fan.On Appliaction of 4D Products of Surveying and Mapping in Toporgraphic Surveying Vehicle[J].Journal of Projectiles,Rockets,Missiles and Guidance,2010,30(6):193-194.
[4] 李国宏,杨建军,韩小斌.地形联测车技术升级问题分析[J].弹箭与制导学报,2007,27(5):220-222. LI Guo-hong,YANG Jian-jun,HAN Xiao-bin.The Analysis of the Technique Upgrade Question about the Landform-Survey-Vehicle[J].Journal of Projectiles,Rockets,Missiles and Guidance,2007,27(5):220-220.
[5] 泰永元.惯性导航[M].北京:科学出版社,2006:327-331. TAI Yong-yuan.The Inertial Navigate[M].Beijing:Science Press,2006:327-331.
[6] 严恭敏.车载自主定位定向系统研究[D].西安:西北工业大学,2006. YAN Gong-min.Research on the System of Vehicle Position and Azimuth Determining[D].Xi’an:Northwestern Polytechnical University,2006.
[7] 夏德安,朱宏.北斗卫星导航定位系统在防空兵种的应用[J].军事天地,2007,26(4):115-117. XIA De-an,ZHU Hong.The Application of the Beidou Navigation System in Antiair Soldier [J].Military World,2007,26(4):115-117.
[8] 张晓安,逯亮清,杨彪.应用延长基线法实现北斗双星的快速定向[J].光学精密工程,2010,18(11):2462-2464. ZHANG Xiao-an,LU Liang-qing,YANG Biao.Fast Oriertation of Beidou Bi-Satellite by Extending Baseline[J].Optics and Precision Engineering,2010,18(11):2462-2464.
[9] 逯亮清,张晓安,吴美平.基于速度辅助的车载定向模糊度动态确定方法[J].中国惯性技术学报,2009,17(6):684-685. LU Liang-qing,ZHANG Xiao-an,WU Mei-ping.Method of Dynamic Ambiguity Determination of Vehicle Orienting by Satellite Based on Velocity Aids[J].Journal of Chinese Intertial Technology,2009,17(6):684-685.
[10] 泰永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,2004. TAI Yong-yuan,ZHANG Hong-yue,WANG Shu-hua.The Theory of Kalaman Filter and Intergrated Navigation[M].Xi’an:Northwestern Polytechnical University Press,2004.
[11] CHANG Kai-wei,HUANG Yun-wen.An Intelligent Navigator for Seamless INS/GPS Integrated Land Vehicle Navigation Applications[J].Applied Soft Computing,2008,8(1):722-733.
[12] HIDE C,MOORE T,SMITH M.Adaptive Kalman Filtering Algorithms for Integrating GPS and INS[J].Position Location and Navigation Symposium,2004,4(5):227-233.
[13] GREWAL M S,WEILL L R,ANDREWS A P.Global Positioning Systems,Inertial Navigation and Integration[M].New York:Wiley Interscience,2007.
[14] 金伟.惯性/天文/卫星组合导航技术[M].北京:国防工业出版社,2011. JIN Wei.INS/CNS/GNSS Integrated Navigation Technology[M].Beijing:National Defense Industry Press,2011.
Application Design of Vehicle Integrated Navigation in Battlefield Reconnaissance
LIU Jian,XU You-zhe,JIA Jun-qiang
(Beijing Institute of Electronic System Engineering,Beijing 100854,China)
In order to improve the continuity, accuracy and rapidity of the battlefield reconnaissance, and to increase the battlefield reconnaissance environmental adaptability of position and orientation vehicle (POV), the Kalman filtering algorithm is for the first time used for data fusion in the integrated navigation in the battlefield reconnaissance of the POV with comprehensive characteristics of each device such as BD2(BeiDou 2), SINS,speedometer and altimeter. The experimental results show that the design effectively improves the environmental adaptability of the battlefield reconnaissance of the POV, and a high position accuracy, continuity and basically seamless navigation positioning in the whole region is achieved.
BD2;SINS;speedometer;altimeter;combined navigation;battlefield reconnaissance
2016-06-15;
2016-11-18
有
刘建(1986-),男,山东青岛人。工程师,硕士,研究方向为定位定向总体设计。
通信地址:100854 北京142信箱30分箱17号 E-mail:jidaliujian2008@163.com
10.3969/j.issn.1009-086x.2017.03.007
V249.32+8
A
1009-086X(2017)-03-0040-06
