基于直升机主旋翼回波的检测方法研究
2017-06-26吴琳拥
胡 瑞,吴琳拥
(四川九洲电器集团有限责任公司 第2研究所,四川 绵阳 621000)
基于直升机主旋翼回波的检测方法研究
胡 瑞,吴琳拥
(四川九洲电器集团有限责任公司 第2研究所,四川 绵阳 621000)
提出了一种利用直升机主旋翼雷达回波特征检测直升机的方法。通过理论和实测数据分析直升机旋翼闪烁脉冲回波时域调制特点和频域分布特性,提出了时域检测分析方法和Hough变换算法获取直升机旋翼闪烁回波的闪烁脉冲宽度和闪烁周期,从而实现对直升机的有效探测。经实测数据验证,该方法能够有效检测距离3 km、高度100 m的施瓦泽269C-1直升机和罗宾逊R44直升机。
雷达探测;悬停直升机;目标回波;Hough变换
武装直升机具有受地形限制少、机动性能高、敏捷灵巧、隐蔽性能好、生存能力和攻击能力强等优点,满足山地丛林地区作战要求,可用于低空及超低空突防抵近攻击、战场前线侦察,成为现代空袭作战中的“杀手锏”[1]。由于直升机飞行高度低、速度慢甚至可以悬停飞行,常规雷达采用的动目标检测(MTD)或动目标显示(MTI)技术对其探测时会将其作为固定目标滤除,难以实现有效探测[2]。但是,对处于悬停或低速飞行状态的直升机,其主旋翼转动会形成微多普勒调制信息[3-5],其为目标检测提供了可能,开展基于直升机主旋翼回波的目标检测方法研究,提高常规雷达低空超低空近程探测和战场监视雷达的综合探测性能具有重要意义。本文所介绍的悬停直升机检测方法,是利用主旋翼回波的闪烁脉冲特性,通过时域相关检测法[6]和Hough变换检测[7-8],对直升机进行分析和检测,对施瓦泽269C-1直升机和贝尔206直升机等多个型号目标机进行验证。
1 主旋翼回波特性
1.1 闪烁脉冲
直升机处于悬停状态时,从推力平衡性考虑,多个主旋翼叶片的转速是相同的,转速误差不超过1 r/min,表明主旋翼回波中只有一个调制周期特征。当雷达波束与直升机桨叶垂直时,回波信号最强,当直升机桨叶旋转偏离垂直方向时,脉冲回波的幅度锐减,从而形成闪烁脉冲。如果雷达观测时间足够长,如图1所示,雷达接收机将接收到幅度由辛格函数调制的周期性闪烁脉冲串[9]。
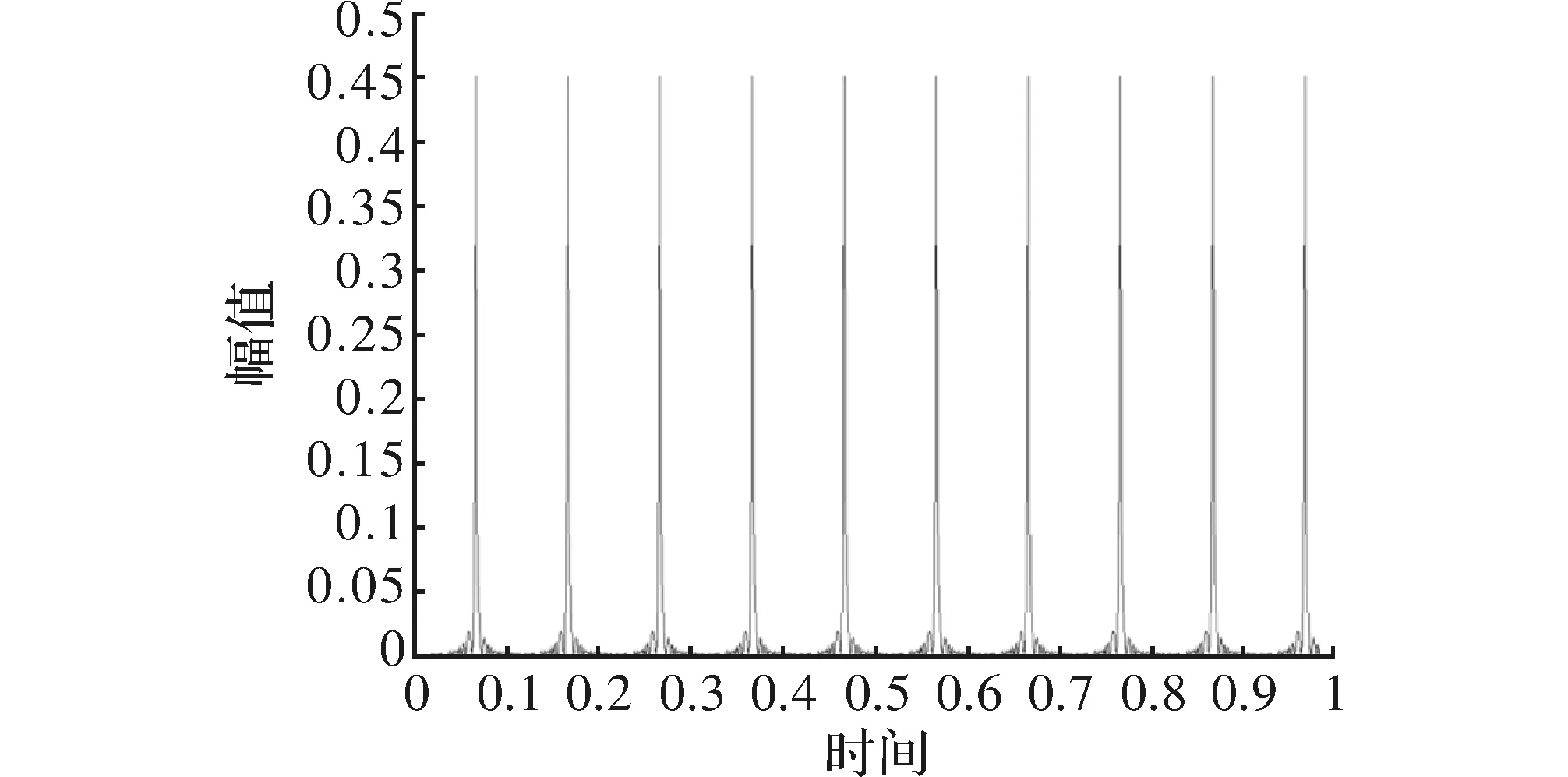
图1 闪烁脉冲示意图
1.2 闪烁脉冲宽度
取主旋翼回波脉冲的半功率点宽度为其闪烁脉冲宽度τs的度量,则
(1)
其中,VL为直升机旋翼顶端线速度;VL=2πfrotL,frot为直升机旋翼转动频率;L为直升机旋翼长度;λ为雷达工作波长。由于在雷达探测目标时,通常信噪比(或信杂比)较低,能够用于探测的回波脉冲能量主要集中在辛格函数的3 dB宽度内[10]。为检测到目标,对目标回波信号进行采样时应保证在函数主瓣的3 dB时宽内至少有一个采样,即要求雷达重复频率应尽可能高。
1.3 脉冲闪烁周期
闪烁脉冲周期Ts可表示为
(2)
为保证一次扫描能够有效采样到主旋翼的闪烁脉冲,要求雷达具有较长的波束贮留时间,保证雷达接收到更多回波信号的闪烁脉冲。
2 检测原理
2.1 时域相关检测法
对直升机回波信号进行动目标显示MTI对消处理,消除机身固定回波能量,经傅里叶变换在频域消除叶榖、尾翼等回波能量和地杂波干扰,再经过逆傅里叶变换成时域信号序列。根据主旋翼闪烁脉冲回波呈周期性固有特性,在信噪比较高的时候可用其作为检测依据,如图2所示。

图2 时域相关检测流程
2.2 Hough变换检测
Hough变换的物理意义简单理解为将在直线上均匀排列的一系列点都通过空间上的某个点,每通过一次就是对空间上某固定点的积累(或加强)。直升机处于悬停状态时,如果不考虑直升机机身的抖动、一次积累时间内雷达扫描周期的变化等不确定因素,将连续多次扫描得到的数据排列在一起,主旋翼回波应该位于一条直线上,通过Hough变换,该直线映射成一个点,实现目标检测。直线的斜率与主旋翼回波脉冲的闪烁周期和雷达的扫描周期有关,如图3所示,该图为米171直升机主旋翼闪烁脉冲回波[11]。主旋翼闪烁回波位于一条直线上,且直线的斜率与主旋翼回波脉冲闪烁周期与雷达帧周期有关。
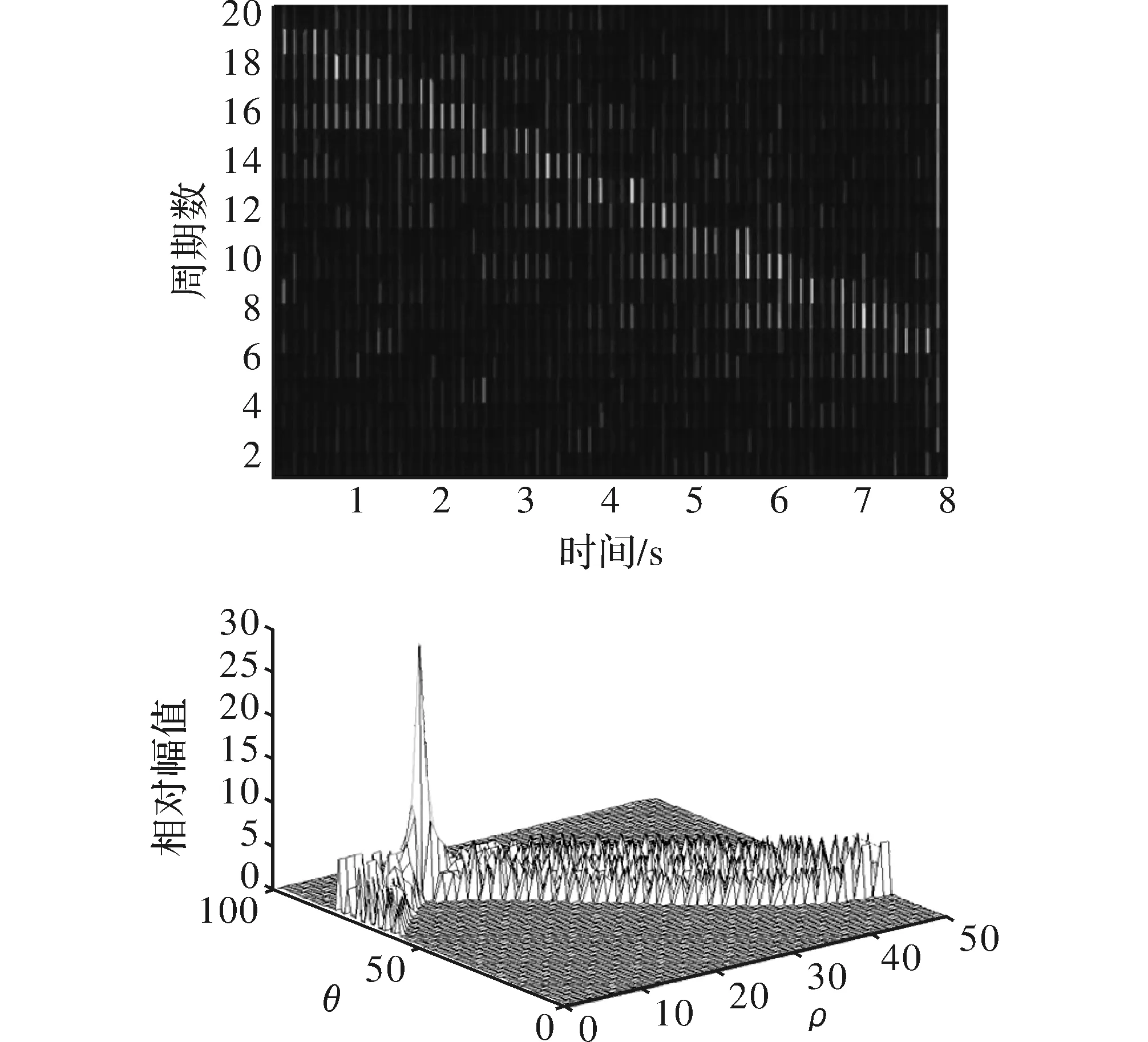
图3 Hough变换后结果
3 试验仿真
3.1 目标机参数
施瓦泽269C-1直升机和罗宾逊R44直升机两型目标机参数,以及依据式(1)和式(2)计算所得的闪烁脉冲宽度和闪烁周期,如表1所示。
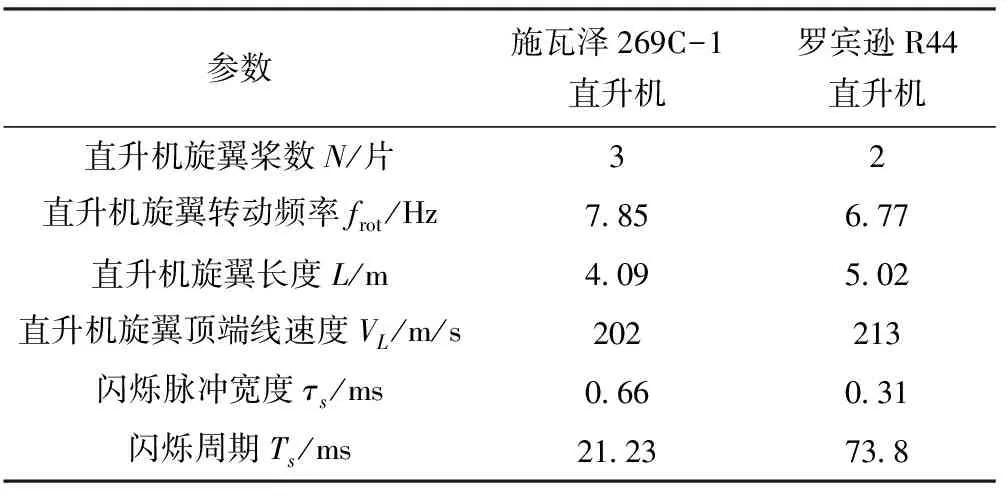
表1 两型目标机参数及闪烁脉冲特性
3.2 雷达参数设计
用于回波数据采集的雷达平台设计载频为1 GHz,信号格式采用13位巴克码,时宽2.6 μs,带宽5 MHz,脉冲重复周期100 μs,天线转速20 rpm[12-13]。
3.3 仿真结果
3.3.1 时域相关检测法
施瓦泽269C-1直升机。直升机回波数据按照图2所示流程处理,得到主旋翼回波的时域数据,主旋翼闪烁周期21 ms,与理论值21.23 ms相符,如图4所示。
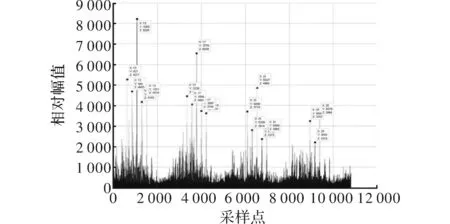
图4 主旋翼回波时域特性
同理,计算得出罗宾逊R44直升机的闪烁周期为73.5 ms,与理论值73.8 ms相符。在信噪比较高的情况下,时域相关检测法能够检测悬停直升机。
3.3.2 Hough变换检测
将施瓦泽269C-1直升机8帧数据剔除机身回波后,以帧为单位排成一列,经Hough变换,得到检测结果,目标峰值明显,能够实现悬停直升机的检测,如图5所示。
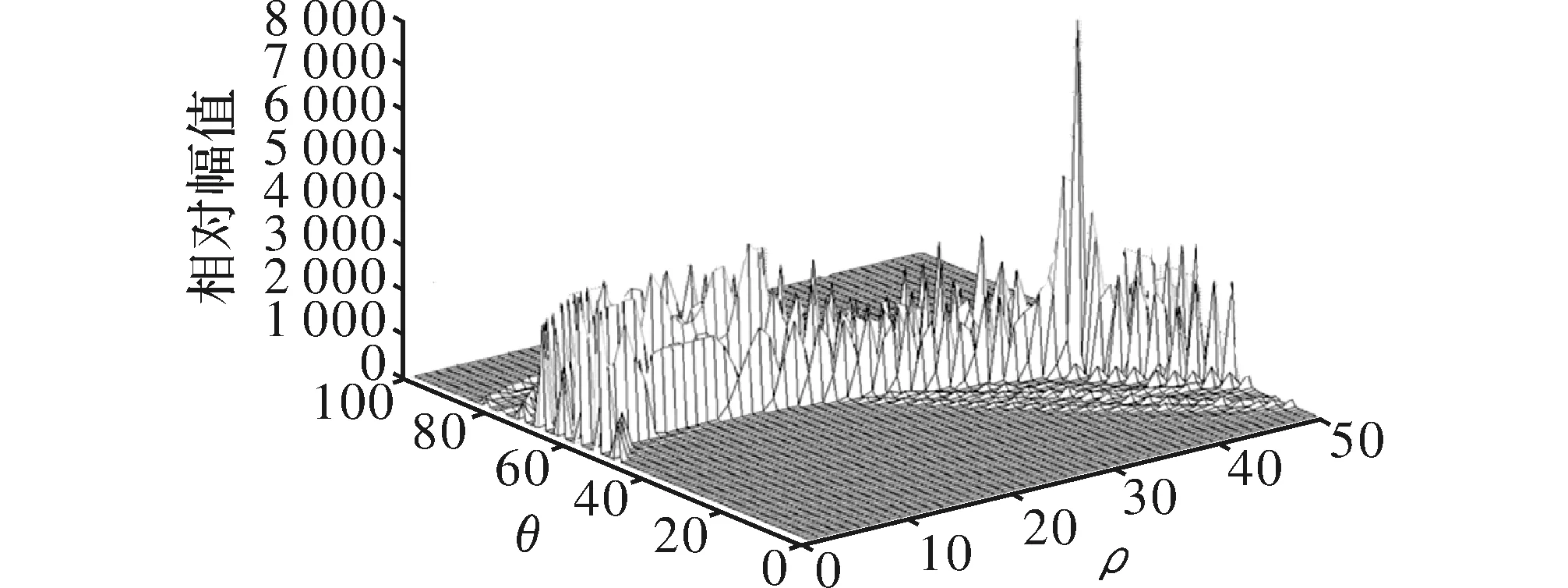
图5 Hough变换结果
4 结束语
通过分析、仿真和试验验证,采用时域相关检测法和Hough变换算法,可实现对悬停直升机的检测。在工程实现阶段,由于原始数据存储量大,Hough变换算法资源需求多,对信号处理硬件提出较高要求。本文所提到的试验中,信号处理模块采用DSP6455搭载多片DDR3芯片的设计方式,系统具备对10帧以上回波数据的缓存和处理能力,达到系统试验验证要求。在本文直升机悬停检测基础上,结合各型直升机独有的闪烁周期特性,建立直升机数据库,能够进一步实现直升机的分类功能[14-15]。
[1] 周家波,杨凯.武装直升机现状和发展趋势探析[J].国防科技,2007(5):40-44.
[2] 丁鹭飞,耿富录.雷达原理[M].3版.西安:西安电子科技大学出版社,2002.
[3] Chen V C,Li F Y,Ho S S.Micro-Doppler efect in radarphenomenon,model and simulation study[J].IEEE Transactions on Aerospace and Electronic Systems,2006,42(1):2-21.
[4] Chen V C,Li F.Analysis of micro-Doppler signatures[J].IEE Proceedings on Radar,Sonar and Navigation,2003,150(4):271-276.
[5] 陈行勇,黎湘,姜斌.基于微多普勒特征的空中目标识别[J].现代雷达,2006,28(10):30-33.
[6] 李道京,张麟兮,俞卞章,悬停直升机回波信号检测和分类[J],航空学报,2003,24(5):452-455.
[7] 方前学,孙文峰,王首勇.基于直接Hough变换的悬停直升机检测器性能分析[J].空军雷达学院学报,2003,17(4):4-6.
[8] 方前学,孙文峰,王首勇.用二值Hough变换法检测悬停直升机[J].空军雷达学院学报,2004,18(1):1-3.
[9] 董普靠.直升机的雷达探测技术[J].火控雷达技术,2004,33(4):17-21.
[10] Merrill I Skolnik.雷达手册[M].3版.南京电子技术研究所,译.北京:电子工业出版社,2010.
[11] 董普靠,朱道光,郝小宁.一种悬停直升机的探测方法[J].火控雷达技术,2005,34(2):13-16.
[12] 张明友,汪学刚.雷达系统[M].2版.北京:电子工业出版社,2006.
[13] 孙文峰,张晨,王永良.悬停直升机的雷达探测技术[J].电子学报,2002,30(6):896-899.
[14] 张军,赵洪钟,付强,等.悬停直升机的识别[J].系统工程与电子技术,2002,24(2):6-9.
[15] 丁建江.防空雷达目标识别技术[M].北京:国防工业出版社,2008.
Research on Detection Method of Helicopter Main Rotor Echo
HU Rui,WU Linyong
(Second Research Institute, Sichan Jinzhou Electric Refco Group Ltd., Mianyang 621000, China)
The article proposes a method to detect the helicopter based on the echo signal of the helicopter rotor blade. The features of the time-domain modulation and the frequency distribution of the pulse echo signal of the helicopter rotor blade are analyzed based on the theory and measured data, and the pulse width and glint period of the echo signal of the helicopter rotor blade are obtained by the time-domain detection method and Hough transform algorithm, so as to realize detection of the helicopter. The measured data show that the proposed algorithm can detect the Schweizer 269c-1 and Robinson r44 within the range of 3 km and at a height of 100 m.
radar detection; hovering helicopter; target echo; Hough transform
2016- 12- 05
胡瑞(1984-),男,工程师。研究方向:雷达系统设计。吴琳拥(1973-),男,高级工程师。研究方向:雷达信号处理和雷达系统设计。
10.16180/j.cnki.issn1007-7820.2017.06.026
TN957
A
1007-7820(2017)06-096-03
