分布式麦克风阵列声源跟踪方法的研究
2017-06-26林焕楠
林焕楠
(武警工程大学 研究生13队,陕西 西安710086)
分布式麦克风阵列声源跟踪方法的研究
林焕楠
(武警工程大学 研究生13队,陕西 西安710086)
针对分布式麦克风阵列声源跟踪方法展开研究,对麦克风阵列声源跟踪方法进行了阐述,并对其阵列特点进行了分析。在信号处理过程中,采用时间同步、数据融合等关键技术,并提出了实际声学环境下的声源跟踪方法和分布式交互多模型粒子滤波声源跟踪算法,通过仿真实验建立模型,实验结果证明了所提算法的有效行。
分布式麦克风阵列;声源跟踪;粒子滤波
麦克风是一种拾取声音信号和传感器。通过对麦克风声音信号的拾取调查可知,环境噪音和混响影响对单个麦克风的收音效果影响颇大。因而,当前语音识别、定位和语音增强的研究都是以分布式麦克风阵列的形式为主。分布式麦克风阵列因为其具有空间滤波特性,相比之单个的麦克风,在抑制噪音和将其混响效果干扰方面效果较好。分布式麦克风阵列在多媒体领域、车载系统领域的应用范围越来越广,基于分布式麦克风阵列的电子产品也不断涌现,如Polycom公司开发的分布式麦克风阵列视频会议系统已经得到广泛应用。但是,分布式麦克风阵列声源跟踪方法的理论还有实践技能操作,还存在很多漏洞,需要后期技术研究人员对其进行改进完善。
1 阵列特点及其核心技术
分布式麦克风阵列是有多个麦克风有序组合在一起,它聚集了众多单个麦克风不具备的优点,因此应用前景较广。针对分布式麦克风阵列可以将其视作多个麦克风阵列组合而成的传感器网络。
(1)分布式麦克风阵列的特点。分布式麦克风阵列可以视作多个麦克风阵列组成的传感器网络,它是麦克风阵列研究的新方向。分布式麦克风阵列与无线传感器网络以及分布式天线阵列网络是一脉相承的,尤其是近些年,物联网的发展,分布式麦克风阵列发展正好与其未来发展趋势一致。
分布式麦克风阵列与传统麦克风阵列相比,没有规则的拓扑结构,因此分布式麦克风表现形式日渐多样化发展。阵列在空间摆放位置也更加随意灵活。此外,分布式麦克风阵列不同于传统麦克风阵列,个别阵列的损坏并不能影响整个网络性能。分布式麦克风阵列结构具有多样性和不规则性的特点,所以分布式麦克风阵列信号处理方法方比之传统的麦克风阵列在处理问题上更具有广泛性的特点。
分布式麦克风阵列中阵元间距必须满足空间采样定理。由于空间采样定理是将相邻的两个麦克风作为空间采样点,信号空间的采用频率则是阵元间距的倒数。为避免采样信号不出现空间混叠的情况,必须对分布式麦克风阵列的阵元间距加以有效控制,保证阵元间距≦采样信号波长的长度[1]。针对分布式麦克风阵列具体的阵元间距问题,还需依赖于具体应用的实际情况;
(2)分布式麦克风阵列核心技术。分布式麦克风阵列中陈列数目众多,若分布式麦克风阵列所有阵列都对其进行定位和跟踪,势必会给声源跟踪跟工作人才带来庞大的计算量负担。因此,选择合适数量的麦克风阵列参与到分布式麦克风阵列应用问题的解决当中,将是提升分布式麦克风阵列系统运行速度和促进数据融合以及声源跟踪的有效技术保障。考虑到分布式麦克风阵列是一种特殊的无线传感网络,分布式麦克风阵列算法大多数都是借鉴无线传感处理方式,所以其解决方式为动态成簇理论或者是数据结构的有向图、无向图知识。分布式麦克风阵列初期的声源跟踪方法应用中,一旦声源靠近目分布式麦克风阵列,该目标附近遇到阵列检测信号后,就开始组件动态簇。具体动态簇声源跟踪过程如图1所示。
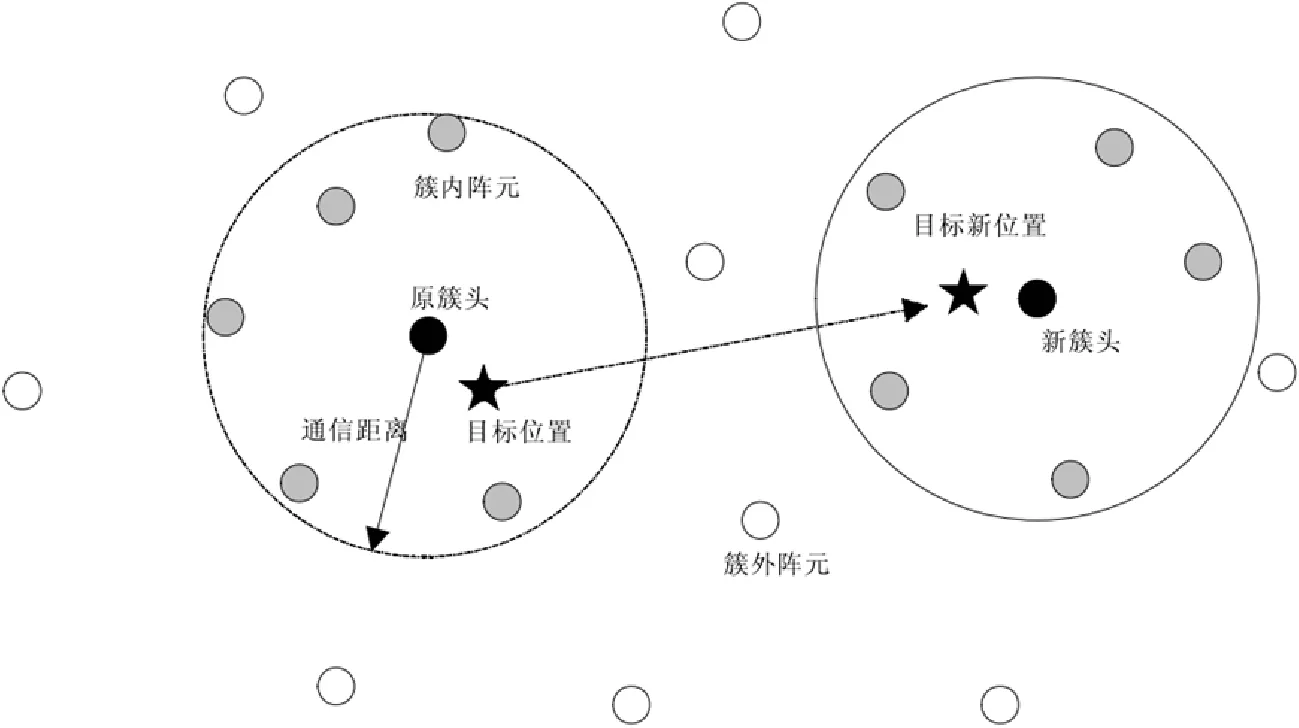
图1 动态簇声源跟踪过程
时间同步是分布式麦克风阵列的另一项重要支撑技术,其性能直接关系到分布式麦克风阵列运行性能是否安全。时间同步需求来自于:声源跟踪过程中广义互相关算法计算求时延和声源目标跟踪交互式多模型粒子滤波算法都必须保持一致,否则将会造成分布式麦克风阵列误差偏大。与此同时,分布式麦克风阵列动态簇和阵列之间的数据融合需要时间同步。
分布式麦克风阵列是由多个麦克风阵列组成的网络,在声源跟踪的整个过程中,每一个阵列都会有一个跟踪结果,如何将多个数据有效的联合,共同完成分布式麦克风阵列应用过程中遇到的问题,是数据融合在分布式麦克风阵列数据信息处理中的关键步骤[2]。当然,数据融合的好坏程度直接关系到分布式麦克风阵列声源跟踪的结果,所以分布式麦克风阵列的数据融合过程中,需要将簇内各阵列的数据按照一定的逻辑算法进行融合处理,以求得最精确的结果。
2 声源跟踪定位
2.1 基于指纹位置的声源跟踪定位
目前为止已经有声源跟踪定位方法,包括可控波束形成、采样信号到达的时间差、空间谱等分布式麦克风阵列常用的声源跟踪定位技术。从数据的计算角度而言,以上方式仅对采集信号进行联合处理,直接计算分布式麦克风阵列声源跟踪位置。此种声源跟踪定位方法属于直接式计算方法,与之对应的另一种声源跟踪定位计算方法为基础数据库的定位方法。此方法比直接计算方法更复杂,它需要采集并计算先验数据,然后建立数据库将其储存,声源跟踪定位过程中对接收到的采样信号和数据库已存在的数据进行联合处理,并通过其间的内在关联计算出目标源的具体位置。例如,分布式麦克风阵列中基于位置指纹的定位技术中,是采用射频信号的目标定位方法,将其应用于无线网络定位系统当中,如无线局域网、GSM网络等。分布式麦克风阵列声源跟踪定位方法根据信号源的位置,对其进行指纹定位。此阶段在目标定位之间进行使用,一旦部署好分布式麦克风阵列声源跟踪定位的网络环境,根据网络环境的需求,确定指纹采集点的数据与其对应的位置[3]。然后,移动信号源对各个采集点的信号进行采集处理,其中每一个采集点的信号与各接收器接收到的信号特征量以及采集坐标,组成一组数据。

图2 基于指纹的整个声源跟踪定位过程
基于位置指纹的声源跟踪定位技术引入到分布式麦克风阵列之中,最终实现声源定位[4]。然而,声源跟踪信号并不等同于一般的射频信号,分布式麦克风阵列也不等同于无线网络,若要进行分布式麦克风阵列声源跟踪定位,还需要解决指纹参数和背景噪音影响这两大难题。
2.2 确定性方法的声源跟踪定位
确定性方法是指纹声源跟踪定位方法中较为基础的一种定位方法,其在采样数据库中的存在形式主要是确定的特征矢量,它根据直接观测的信号能量比矢量与数据库中已经存在的信号能量比矢量进行对比,然后确立分布式麦克风阵列声源位置。通常确定性方法主要涉及3种方法:最近邻法、K近邻法和K加权近邻法。随着热计算机技术的发展,对传统的确定性方法也进行了一定的改进钻研,借助对K近邻法和K加权近邻法的改进,是的分布式麦克风阵列声源跟踪位置即便不在数据库中,也能有良好的定位效果。当然,此种声源跟踪位置方法在数据库的准确度会有所下降,至于跟踪的具体位置,还需要声源跟踪数据人员进行二次判断[5]。针对改进确定性定位法存在的这一问题,本文对其进行了改进,为其设置一个矢量间的距离阈值θ1,若分布式麦克风阵列观测矢量与已经存在矢量之间最下的距离小于这一阈值时,可采用最近邻法进行声源跟踪定位,使用K加权近邻法。
3 仿真实验
一般情况下,为便于分布式麦克风阵列声源跟踪,假设房屋是长方形。本实验,用Matlab 2015b进行语音仿真[6]。分布式麦克风阵列声源跟踪实验仿真中,f0为进行采样频率,设声源在三维空间的位置为X=(x,y,z),分布式麦克风阵列接收位置为X′=(x′,y′,z′)。声源跟踪位置和分布式麦克风阵列距离R=|x-x′|,f为待采样数据频率,ω=2πf,c=340m/s。
实验过程中,对于语音信号进行16 kHz的抽样,并将整个分布式麦克风阵列采样信号的波长分为1 024帧,具体的时间长度为64 ms,为有效提高精度,降低噪音对分布式麦克风阵列声源跟踪的影响,可采用对信号帧加窗的方式。即将分布式麦克风阵列中的麦克风两两一组,其中第n组麦克风信号在时间t定位下,定位Xi,然后将整个信号长度划分为1 024帧,再计算时间延迟。
由此对声源的跟踪算法可以简单描述为:令K表示仿真总时长,M表示运动模型数,S表示分布式麦克风阵列中阵列的个数。

k=1~K簇头及其簇内的成员节点依次完成计算:



输出Xk,Pk,k=1,2,3,…,K
为准确求出时间延迟,试验中所采用的6个麦克风在两两一组后,每一组都需要运行一个独立的粒子滤波[7-10]。初始化时,假设先验概率为p(x0)=0.6,数据融合则采用加权求和的方式计算。仿真实验流程如图3所示。
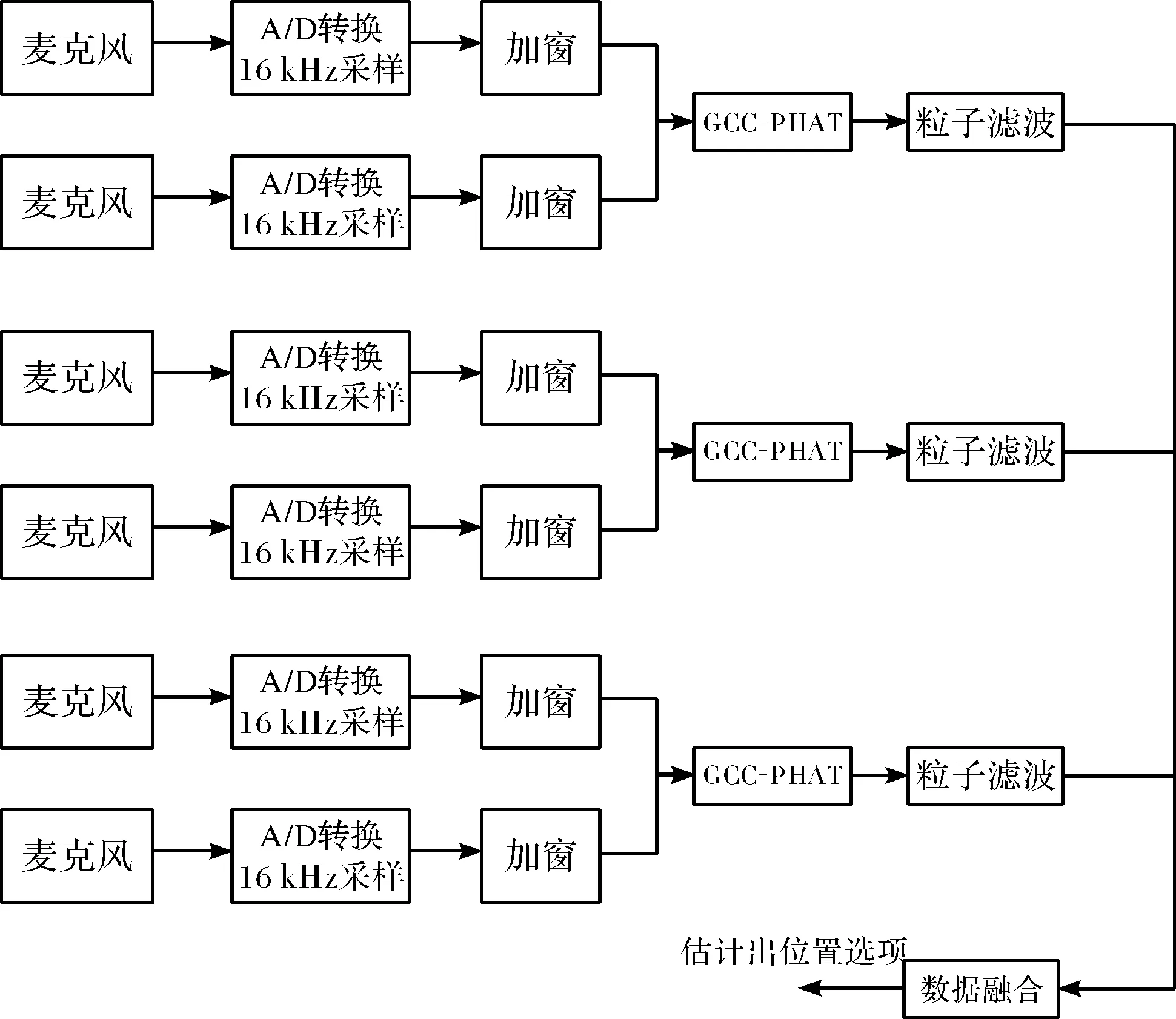
图3 实验流程
4 结束语
分布式麦克风阵列是多个麦克风的组合应用,因其特有空间滤波特性,相比之单个的麦克风,在抑制噪音和混响效果方面较好,而且分布式麦克风阵列在空间摆放位置随意灵活,具体的声源跟踪不会受到摆放位置的影响。分布式麦克风阵列间距必须满足空间采样定理,才能有效计算时间延迟,采集信号,进行数据融合计算,并建立数据库进行数据信息的存储。
[1] 徐康乐,陈迎春,江渊,等.基于相控麦克风阵列的民机主起落架气动噪声源识别技术研究[J].空气动力学学报,2015(4):523-529.
[2] 赵小燕,周琳,吴镇扬,等.基于压缩感知的麦克风阵列声源定位算法[J].东南大学学报:自然科学版,2015,45(2):203-207.
[3] 王冬霞,齐畅,周城旭,等.二维DOA估计中麦克风阵列优化设计[J].大连理工大学学报,2015(1):103-109.
[4] 张一闻,刘建平,张世全,等.利用多点互相关值均值的实时声源定位算法[J].西安电子科技大学学报:自然科学版,2015(1):168-173.
[5] 王青云,赵力,梁瑞宇,等.紧致麦克风阵列压缩采样与 DOA 估计方法[J].东南大学学报:自然科学版,2014(4):687-691.
[6] 杨洁,刘聪锋,蔡啸,等.提高麦克风阵列波束指向性能的虚拟扩展方法[J].西安电子科技大学学报:自然科学版,2016,43(2):114-119.
[7] 房玉琢,许志勇,成光,等.基于自适应盲辨识的麦克风阵列直达波方向估计[J].南京理工大学学报:自然科学版,2014(2):264-270.
[8] 何明军,王凯,孙佳郡.基于 WirelessHART 协议的无线适配器设计[J].通信技术,2014(6):691-696.
[9] 葛金亮.WirelessHART适配器的设计与实现[D].成都:电子科技大学,2011.
[10] 梁炜,李强.无线HART网络管理器的开发与应用[J].中国仪器仪表,2008,28(S1):153-156,163.
[11] 杨沐鑫,王萍.HART协议在粉尘仪中的应用[J]. 电子科技,2014,27(7):5-7.
[12] 陈雷亮,张仁杰,刘虎,等.基于MSP430单片机的无线信号采集系统[J].电子科技,2015, 28(8):39-42.
[13] 周洪伟,罗建,王韫,等.外场环境信息无线监测系统设计[J].国外电子测量技术,2011, 30(4):66-68.
[14] 丁颖.基于HART协议的信号采集/报警系统的研究开发[D].南京:河海大学,2004.
[15] 李继平,凌志浩.无线HART技术及其应用[J].世界仪表与自动化,2008(3):63-65.
[16] 朴星光.过程自动化中的无线HART应用[J].中国仪器仪表,2013(6):40-41.
Distributed Microphone Array Sound Source Tracking Method
LIN Huannan
(No.13 Team, Engineering University of Armed Police, Xi’an 710086, China)
This paper describes the microphone array sound source tracking method, and analyzes the characteristics of the array. The key technologies of time synchronization and data fusion are employed for signal processing. A sound source tracking method in actual acoustic environment is proposed with a distributed interacting multiple model particle filter sound source tracking algorithm. The model is built through simulation experiments. The experimental results verifies the feasibility of the proposed algorithm.
distributed microphone array; sound source tracking; particle filter
2016- 07- 30
林焕楠(1992-),男,硕士研究生。研究方向:通信工程。
10.16180/j.cnki.issn1007-7820.2017.06.022
TN912.3
A
1007-7820(2017)06-082-04
