基于激光导航路径识别的实验室自动引导小车(AGV)设计
2017-06-26胡艳
胡艳
(广西财经学院,广西南宁530003)
基于激光导航路径识别的实验室自动引导小车(AGV)设计
胡艳
(广西财经学院,广西南宁530003)
AGV实训过程中因导航产生的故障亟待进行技术攻关,本文阐述激光定位与制导的基本原理,并应AGV基本功能和实训教学之需,提出了基于激光导航路径识别AGV硬件和软件系统的设计方案,并对激光导航AGV的实训应用提出展望性构思。
激光;导航;AGV
为提高学生的动手能力,满足学生实训需要,设置机械工程、物流和信息智能等专业的高职院校均创建了实训实验室,作为机械工程自动化、物流处理信息化关键设备的AGV,则是实训室的重要实验设备,对AGV的操控性能的研究不仅具有重要的理论意义,更具有重要的提升实训效果的现实意义。
1 自动引导小车(AGV)在实训中存在问题
1.1 AGV介绍
AGV是一种装备电子信息控制系统和自动导航系统,能导向行使、自动寻址和移交载荷,实现程控或无人驾驶的运输设备。AGV由于其灵活性、智能化和高效便捷的优势,得到越来越广泛的应用,现已成为柔性制造系统的重要设备,也是现代工业自动化物流系统中的关键设备之一[1]。
就实训室的AGV而言,其通常采用四轮式电力驱动模式,通过电子信息控制系统的指令,借助导航系统引导在指定的区域和轨道内移动机械体,实现物料传送或搬运货物的自动化。一般而言,AGV系统构造包括电子信息控制系统、通讯系统、导航系统、电源(动力)系统、机械体组成。如图1所示。

图1 AGV系统结构图
1.2 AGV在实训中的常见故障
通常而言,实训室中的AGV(实训版AGV)是应专业设置的需求,按照工业领域的AGV进行缩小设计制造而成。由于设计产生的缺陷和技术尚未攻克的难关所致,AGV在实际运行过程中时常发生一些故障。总体来说,实训版AGV小车的常见故障有如下几种:
一是,AGV对任何操作程序和操作按钮无反应,即进入所谓的死机状态;
二是,AGV读取指令错误,启动或停止时间有误,发生车体碰撞;
三是,因通讯出错,无法接收操作程序指令,通常有“ERROR”字样显示,并伴随“滴……”的报警声;
四是,因导航程序出错或导航失灵,AGV在导航行走过程中上线失败或地标丢失。
据笔者的实训教学实践,导航程序出错或导航失灵导致的故障占故障总发生率的67%.改进导航技术,实现AGV按指令顺利行走成为提高实训教学效果的迫切之需。激光导航由于其精准性成为改进AGV导航性能首选。
2 激光导航原理
2.1 激光定位原理
激光定位是实现激光路径导航的重要前提。简单而言,激光定位就是利用AGV机械体上装配的高分辨率激光扫描仪或激光雷达等光源传感设备进行地标扫描,并将扫描获得的光信号进行精确计算,以确定AGV的位置和方向,从而进行路径规划和导向的定位模式。通常进行激光定位时,需要在目标环境中设定若干路标,并基于这些固定的路标,建立坐标系,同时,以激光传感设备转动中心建立传感设备坐标,记录激光传感设备描一周所形成的夹角,经精确计算得出目标所处坐标的具体位置。激光定位原理如图2所示。

图2 激光定位系统原理
2.2 导航控制原理
无论是工业领域还是实训室中的AGV,一般而言,其行走路径大多数为直线,即便是行走路径中的转弯,均通过长距离的修改简化为直线路径进行代替。正因如此,要对AGV进行导航控制其实就是要对AGV机体运行路径过程中的位置偏差和航向偏差进行控制[2]。
具体而言,AGV在具体特定区域范围内行走时,附在其载体上的激光传感设备对其当前位置和环境以及目标位置和环境进行激光扫描探测,并实时输出高精度位置坐标信号,以位置坐标为基数进行精准定位,经过精确计算并形成导航路径信号,最后由电子信息控制系统和通讯系统向AGV下达指令信号,控制AGV载体左右两轮速度与方向,使其沿着预先设定的路径运行。如图3所示。

图3 导航控制原理
3 基于激光导航自动引导小车(AGV)系统设计
3.1 硬件系统设计方案
自动引导小车(AGV)的功能需求和工作环境决定了其设计理念和设计方案,但不论用于何种领域,激光导航自动引导小车(AGV)均包括五个核心部分,即AGV嵌入式微计算机、智能控制系统、导航系统等、无线通信系统以及动力驱动系统。其中,控制系统类似于人类大脑,是最核心的部分;导航系统类似于人类感官,主要满足AGV内外环境感知与运动操控;无线通信系统主要用于下达控制命令;动力驱动系统主要为满足驱动AGV机械体之需要,使其能行走自如[3]。激光导航机器人硬件设计方案如图4所示。
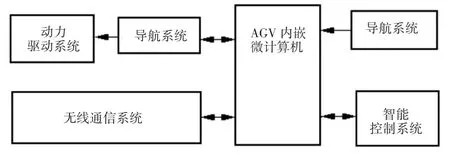
图4 激光导航AGV硬件设计方案
3.2 软件系统设计方案
软件系统的设计必须紧紧围绕AGV功能需求,使其功能得以充分的实现[4]。根据实训AGV的需求和硬件设计方案,笔者将软件设计方案思路锁定为:AGV软件系统尽可能简单实用,同时必须满足对AGV机械体驱动器、无线通信系统、光电传感器等硬件系统的控制(包括初始化、控制信号的输出和返回信号的获取等),还要实现包括对信息显示、传感器信号的处理和模糊控制算法等。
按照这一思路,将AGV软件系统进行模块化设计,即AGV软件系统由系统主程序和各功能子程序组成[5]。主程序主要完成系统初始化、界面的显示(包括模式选择界面和模式信息界面等)、各模式之间的切换等功能。各功能子程序主要包括信号获取和读取、激光传感位置获取、激光导航位置信息显示、模糊控制算法和自动驱动等子程序[6]。激光导航AGV软件系统设计方案如图5所示。

图5 激光导航机器人软件系统设计方案
4 激光导航AGV实训应用测试
4.1 光扫描导引
沿着路径从高处用光束进行扫描,计算机根据光信息(扫描角度以及扫描装置标号),精密检测出AGV现在的位置(如图6所示)。这种方法路径变换容易,扫描方式最简单。

图6 光扫描引导
4.2 信标方式
这种方式是在路径上或沿着路径设置多个标记,标记本身主动发出信号提供有关位置信息。信标方式是从现在位置寻找若干个信标,然后根据其方向和有关信标的位置信息,利用三角测量原理计算出现在的位置,其具体过程如图7所示。

图7 信标引导
5 结束语
随着AGV广泛应用,其市场需求也随之不断增长,激光导航应用可以使AGV实现了虚拟路径规划与导向,实现AGV的安全无障碍行走,甚至掀起AGV调度领域的一场革命。笔者提出的基于激光导航路径识别的实验室自动引导小车(AGV)设计方案或更能满足高职院校实训需求,进一步提升这一方向的实训效果。
[1]唐文伟.AGV在物流领域中的应用前景分析[J].物流技术,2001(3):7-8.
[2]OGATA K.现代控制工程[M].美国:普伦蒂斯-霍尔公司,1997.
[3]吴启平.自动导引车(AGV)关键技术现状及其发展趋势[J].制造业自动化,2013,35(5):106-109.
[4]张正义.AGV技术发展综述[J].物流技术与应用,2005(7):67-73.
[5]任小龙,温浩宇,李华.无向Petri网的多AGV最优路径方法研究[J].西安电子科技大学学报,2008,35(3):517-522.
[6]马志远.智能控制下的AGV路径规划研究[J].机械与自动化,2013(10):98.
Design of Laboratory Automatic Guiding Vehicle(AGV)Based on Laser Navigation Path Identification
HU Yan
(Guangxi University of Finance and Economy,Nanning Guangxi 530003,China)
In the process of AGV practical training,it is urgent to solve the problems caused by navigation.This paper expounds the basic principle of laser positioning and guidance,and puts forward the design of AGV hardware and software system based on laser navigation path recognition applied to AGV basic function and practical training needs,and present expectation to the practical training application of laser navigation AGV.
laser;navigation;AGV
TN249
A < class="emphasis_bold">文章编号:1
1672-545X(2017)05-0019-03
2017-02-28
胡艳(1979-),女,湖南娄底人,硕士研究生,讲师,致力于高校实训室管理工作,研究方向为数据处理和软件工程。
