一种新型自解耦六维力传感器布片与解耦方法
2017-06-24卞学良,王乐,吴利广
一种新型自解耦六维力传感器布片与解耦方法
卞学良1,王乐1,2,吴利广2
(1.河北工业大学机械工程学院,天津300130;2.中国汽车技术研究中心,天津300300)
提出1种新型六维力传感器的应变片布片和解耦方案.采用1种4竖梁结构的弹性体,将测量点数减少为4个,克服了现有技术存在的问题,即应变片数量多、测量误差大以及软件解耦不容易解决实际测量时轮胎的压偏情况的问题.本方法以二向应力测量原理为基础,通过在4个测量点布置2α角度的8个测量片,组成与测量点正应力、剪应力相对应的电桥,最后对桥路进行了分析.该方法使传感器的布片工作量大大减小,提高了传感器精度,具有较大应用前景.
六维力传感器;应力片;解耦;桥路分析
0 引言
多维力传感器的应用领域一直很广泛,包括智能机器人领域、航空航天和军事领域、生物医学工程领域以及其它众多工业领域[1].目前,广泛用于汽车悬架K&C试验台的六维力传感器有一个共同的缺点,即所用应变片数目较多,且难以实现物理解耦而采用与软件结合进行解耦.应变片数量越多测量引入的误差也就越大,而且软件解耦也不容易解决实际测量时轮胎的压偏问题,只能通过其他方式定位初始车轮,而这必将会给测量进一步引入误差.造成该问题的原因主要是六维力传感器设计中应变片布片受到弹性体结构的限制.为了消除耦合,就需要将弹性体结构设计得复杂,但由此造成应变片数目增多,导致贴片、组桥的工作量增加;如果简化弹性体结构,则难以实现物理解耦,造成解耦的复杂,增大误差[2].
郭孔辉教授在文献[3]中对测量解耦问题进行了研究,推导出考虑自重时试验台六分力的解耦公式,提出轮胎耦合力与力矩的标定方法;张家敏教授在文献[4]中提出一种基于改进粒子群的BP神经网络算法,应用到六维力传感器解耦,提高了线性解耦算法精度;文献[5]将3组弹性梁与两个圆柱形导力杆组合,使三组弹性梁的变形彼此独立,从结构上直接消除了力耦合;张为公教授在文献2中提出一种可以直接解耦的布片、组桥方法,只需在弹性体应变梁上选择6个测量点,大大低于传统方式的测量点数(16点或32点);张付祥教授在文献[6]中提出一种竖梁结构的弹性体,但是需要设置12个测量点.以上研究工作主要分为传感器解耦与传感器结构设计两个方向.本文在前人研究的基础上,提出一种基于4竖梁弹性体的传感器结构,将应力测量点数目减少为4个,通过特定的组桥方法实现直接解耦.根据此方法提出一种直接输出型六维力传感器结构[7].
1 应力测量原理
弹性体应变梁在六维力作用下发生变形,表面测量点的应力状态为二向应力状态,如图1a)所示.为了测量二向应力,将应变片成2α角度粘贴,如图1b)所示.设与x轴成+α、-α角方向上的应变分别为由材料力学理论[8]可知,的关系为
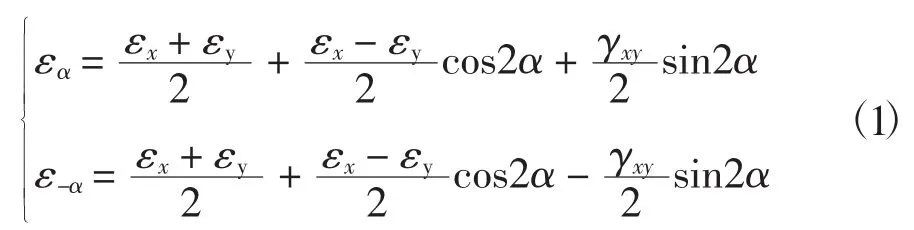
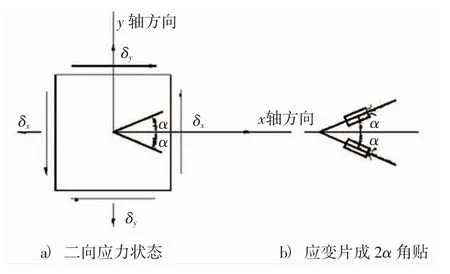
图1 二向应力状态及应变片夹角Fig.1 State of two dimensional stress and strain gages angle

式中μ为泊松比.

式中E为材料的弹性模量.
2 应变片布片方案
不同于文献5的8竖梁结构弹性体,本方法设计了1种4竖梁的弹性体,简化了结构,并采用了如图2所示的布片方案.
如图2所示,在A、B、C、D 4条竖梁上设置4个测量点,且均布置在梁的外径一侧.在每个测量点处,与应变梁轴线成α和-α角度的方向各贴一应变片,共8个,且应变片角度由第1节分析可知,可以计算得到各测量点的二向应力状态,再采用特定的组桥方式,便可以实现输出解耦.
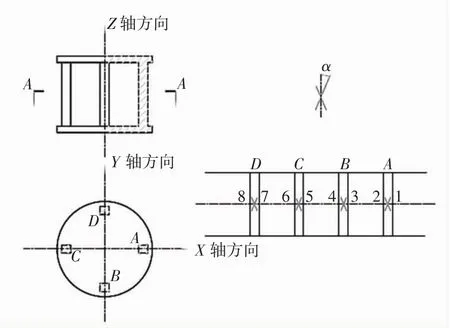
图2 应变片布片方案Fig.2 Strain gages distribution
3 组桥方案与桥路分析
根据上节布片方式确定本方法的组桥方案,如图3所示.假定各应变片的阻值相等,设各应变片输出应变为为补偿片),则可组成与测量点正应力、剪应力相对应的电桥[10].
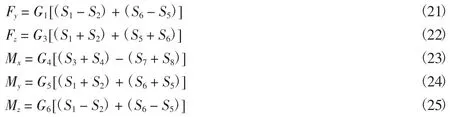
图3中的a)、b)、c)、d)、e)、f)即为输出力/力矩的测量电路,设各电桥的输出电压为容易得到各桥路的输出为:
3.系统性风险。相较于外国企业,通常中国企业的自主创新能力较弱,研发过程中往往伴随着大量的人力、物力以及资金投入,某些无形资产的研发还需要耗费大量的时间,并且能否研发成功还具有较大的不确定性;有时投入很多却不一定能够换来满意的、有价值的研究结果,甚至可能失败。因此,如果企业评估自身的系统性风险较高,无力承担无形资产研发成本,或者认为自身的研发实力较弱,研发失败的几率较高,往往就会选择以购买或者接受投资等方式获得相关技术,取代自主研发,以降低不必要的成本支出。据此,我们提出第三个假设:
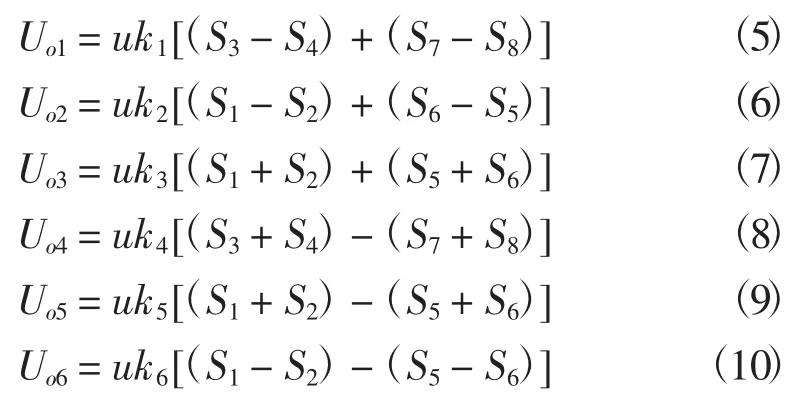
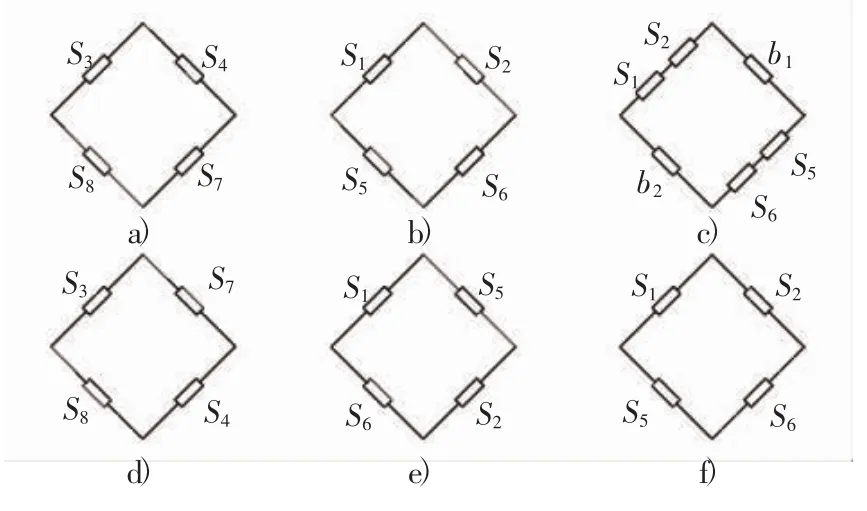
图3 应变片组桥方案Fig 3 Strain gages bridges
将弹性体所受的力/力矩用广义力Q代表,即



下面分析各输出力/力矩对桥路1的影响:







通过对6个桥路的分析,证明这种应变片布片方法与组桥方案完全可以实现六维力信号的直接解耦,从而应用于六维力传感器的设计,从原理上消除耦合.
4 结论
由以上分析可知,此传感器的应变片布片和组桥方案可以很好的消除传感器弹性体结构设计与应变片布片及解耦之间的矛盾,能够实现六维力信号的直接解耦输出,并且将测量点减少到4个,应变片减少至8个,贴片工作量大大减小,同时也减少了因测点选择而引起的误差和应变片的贴片误差.该方案不仅解决了K&C试验时测量时轮胎的压偏情况问题,而且有较好的可移植性,其他需要直接输出应力测量结果的零部件也可使用该方法,方便的改造传感器,适应不同零部件的应力测量.
[1]熊雅晴,虞伟建.一种新型自解耦六维力/力矩传感器结构设计与优化[J].传感器与微系统,2015,34(11):106-108,115.
[2]张为公.一种六维力传感器的新型布片和解耦方法[J].南京航空航天大学学报,1999(2):104-107.
[3]郭孔辉,杨一洋,许男,等.轮胎试验台六分力解算、标定与优化分析[J].农业机械学报,2014,45(5):8-15.
[4]张家敏,许德章.改进粒子群优化BP神经网络的六维力传感器解耦研究[J].仪表技术与传感器,2016(7):8-11.
[5]Yang K,Ma S,Wang T,et al.Design of a decoupled six-axis force sensor for powered lower limb exoskeleton[C]//International Conference on Computer Engineering,Information Science&Application Technology.2016.
[6]张付祥.仿人行走机器人脚部六维力传感器研究[D].哈尔滨:哈尔滨工业大学,2002.
[7]吴利广,朱冰,孙博华.悬架K&C试验台六分力传感器[P].吉林:CN203772473U,2014-08-13.
[8]刘鸿文.材料力学[M].第4版.北京:高等教育出版社,2004.
[9]张为公.用应变片测量应力的改进方法——二向应力片及三向应力片[J].南京航空航天大学学报,1993(5):700-705.
[10]姚智慧,张付祥,陈华.新型力解耦机器人六维力传感器研究[J].哈尔滨工业大学学报,2004,36(2):160-162.
[责任编辑 田丰夏红梅]
Distributing and decoupling method of a novel self-decoupling six-dimensional force sensor
BIAN Xueliang1,WANG Le1,2,WU Liguang1
(1.School of Mechanical Engineering,Hebei University of Technology,Tianjin 300130,China;2.China Automotive Technology and Research Center,Tianjin 300300,China)
A new scheme of six-dimensional force strain gages of sensor distributing and decoupling is proposed.Problems of present technologies such as complex structure of spoke,test errorand decoupling indirectly is solved by taking new distributing method and bridging form.The stress measurement principle and distributing method is described in detail, and finally the bridge form is analyzed.This method greatly reduces the workload of distributing and improved the precision,which has a good prospect of application.
six-axis force sensor;stress patches;decoupling;bridge circuit analysis
TP212.12
A
1007-2373(2017)02-0049-04
10.14081/j.cnki.hgdxb.2017.02.009
2016-11-03
卞学良(1957-),男,教授,bxl18@163.com.
