基于Otsu图像分割的颗粒与气泡碰撞检测方法
2017-06-22梁秀满付董帅牛福生刘振东张晋霞华北理工大学电气工程学院河北唐山063009华北理工大学矿业工程学院河北唐山063009
梁秀满,付董帅,牛福生,刘振东,张晋霞(.华北理工大学电气工程学院,河北 唐山063009;.华北理工大学矿业工程学院,河北 唐山 063009)
基于Otsu图像分割的颗粒与气泡碰撞检测方法
梁秀满1,付董帅1,牛福生2,刘振东1,张晋霞2
(1.华北理工大学电气工程学院,河北 唐山063009;2.华北理工大学矿业工程学院,河北 唐山 063009)
为了准确地检测出浮选过程中颗粒与气泡是否发生碰撞,提出了一种基于形态学图像处理和最大类间方差法(Otsu)的颗粒与气泡碰撞检测方法。首先利用图像的预处理操作优化图像,通过最大类间方差法分割出目标区域与背景区域,然后结合最小二乘法将颗粒与气泡拟合成圆,方便求取坐标信息及半径,最后将所有的颗粒位置提取到一幅图像中,实现了对颗粒位置的跟踪,避免了连续帧图像跟踪的复杂程度。结果表明,该算法能够快速地检测出颗粒与气泡是否发生碰撞,有效地节省了人工试验的工作时间。
图像分割;颗粒;气泡;最大类间方差法;碰撞检测
浮选是一种从矿石中分离有用矿物的重要技术手段,全世界的矿石及物料每年经过浮选技术处理的高达数10亿t,因此对浮选过程的研究尤为重要。在浮选过程中提升矿物颗粒与气泡间的碰撞概率,是提升浮选分离效率的关键之一[1]。研究表明[2-4],颗粒与气泡间的碰撞概率受到来自颗粒的密度、粒度及气泡大小等诸多因素的影响,对于这些影响碰撞因素的分析需要大量的实验。因此,设计出一种精确的检测碰撞的方法对于研究该领域具有重要意义。
近年来,人们越来越关注浮选分离问题,对于浮选过程中的颗粒与气泡碰撞研究日趋增多。张世杰等[5]搭建了浮选碰撞过程试验系统,其中颗粒与气泡碰撞的检测以及颗粒信息提取皆为人工操作,因此试验量较大。S. Uddin等[6]在研究颗粒与气泡间的作用关系的实验中,测量出了气泡的沉降电势,通过肉眼直接观察气泡的特征,提出为了控制气浮效果可使气泡带电。类似的实验均是通过人工的方法进行统计以获得颗粒与气泡的形状信息,其操作量大,准确性有待提升,因此需要用图像处理技术取代人工方法。Moolman等[7]最早在浮选过程中引入图像处理算法,为该领域图像信息的提取奠定了基础。此后,瓜里尼等[8]用CCD相机拍摄了浮选过程中的泡沫图像,通过应用图像处理技术,提取出气泡的特征参数,从而用此来作为评价矿物浮选效果的重要指标。
本文在基于对气泡图像处理系统[9]研究的基础上,提出利用Matlab图像处理的方法检测颗粒与气泡是否发生碰撞,碰撞识别准确,为大量实验提供了可靠的技术支撑。
1 Matlab图像处理
1.1 图像的获取
本研究搭建了如图1所示的颗粒与气泡碰撞概率测试系统,采用CCD相机对颗粒滴落过程进行拍摄,为了保证图像中颗粒数量较少,应将含颗粒的矿浆浓度尽量控制在50mol/L以内。由于Matlab中的imread函数能够读取各种类型的图像,因此利用该函数寻找图像路径并进行读取操作。
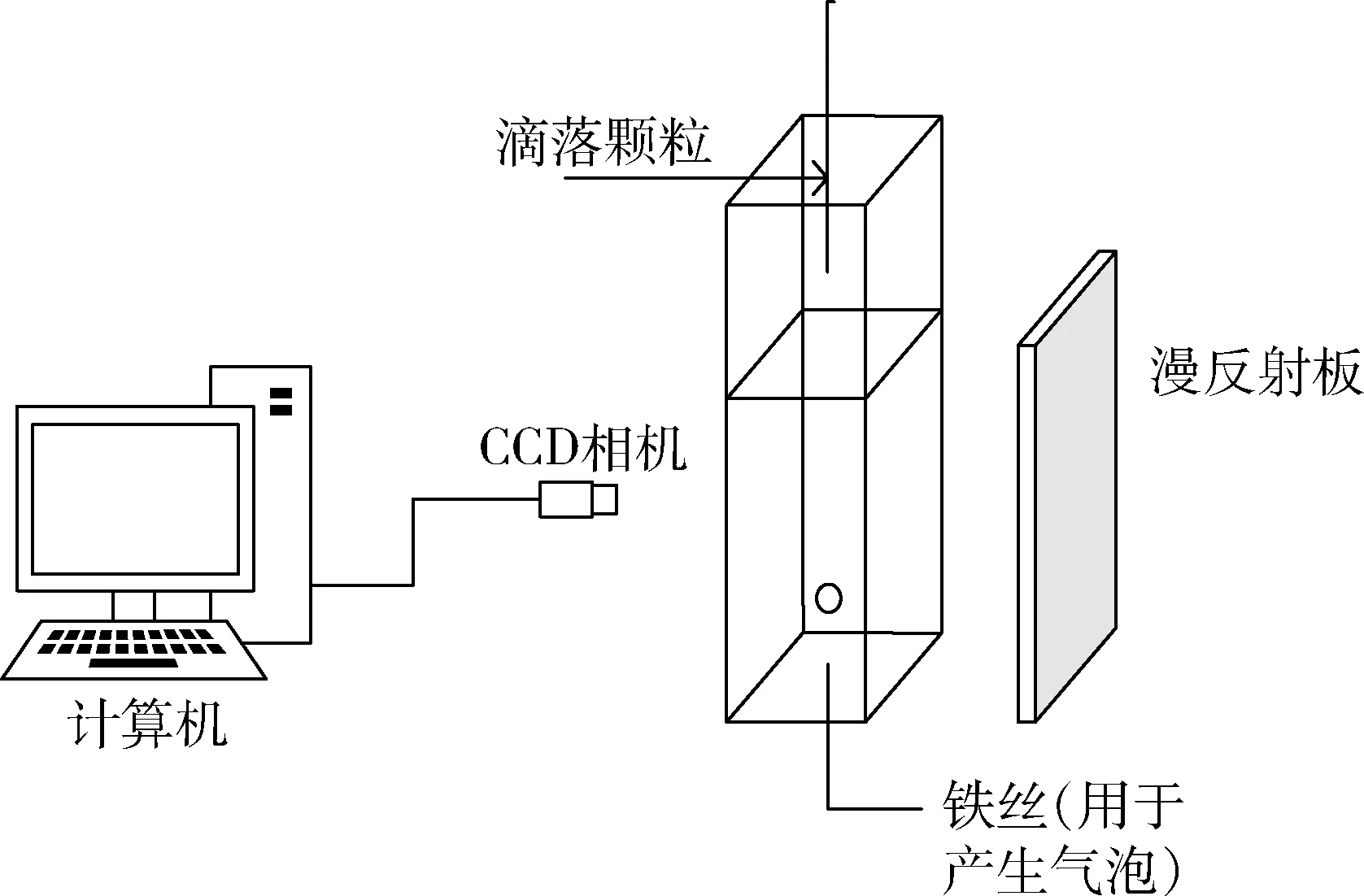
图1 测试系统结构示意图
1.2 图像预处理
由1.1节可获得PNG文件格式的图像,该文件格式的优点在于占用空间小,使用Matlab处理起来更加迅速。本研究采用图像预处理是为了去除图像中的噪声干扰,有效改善图像质量,使有用信息得到增强[10]。该图像处理方法的步骤如下所述。
1)图像灰度化。将原有的彩色图像变化为灰度图像即为图像的灰度化处理[11]。由于彩色图像有R、G、B三个分量来决定颜色的变化范围,而灰度图像的R、G、B三个分量数值相同,因此为了简化后续图像处理中的计算量,应先将彩色图像转化为灰度图像。本研究采用Matlab中的rgb2gray函数,将RGB色彩空间转化为HSV色彩空间,提取颜色分量,获得灰度图像。
2)取反。由于图像中的高灰度区间更容易处理,因此应将目标区域由低灰度区间转换到高灰度区间,进而使目标区域突显出来,更有利于图像细节的处理。对灰度图像求反的公式,见式(1)。
Gray=255-Gray0
(1)
式中:Gray0为初始的灰度值;Gray为取反后的灰度值。可通过Matlab中的imcomplement函数实现取反操作。
3)中值滤波。为了滤除孤立的噪声干扰,保护图像的有用信息,对二值图像进行降噪处理。中值滤波的基本原理为:任意选取一个像素点邻域,按照灰度值的大小进行排序,得到的中间值即可看作该像素点的灰度值[12],对应公式见式(2)。
g(x,y)=med{f(x-k,y-l),(k,l∈W)}
(2)
式中:g(x,y)为滤波后图像;f(x,y)为原始图像;W为区域模板。可通过Matlab图像处理中的medfilt2函数实现滤除噪点处理。
4)优化二值图像。通过调用Matlab中的bwareaopen函数删除二值图像内小于900的区域,从而达到了形态学降噪的目的。但是由于图像中待移除的小面积对像为白色,处理难度较大,因此在应用该函数前后均应加入取反操作。
5)边界提取。本研究采用Matlab中的bwboundaries函数进行二值图像边界寻找,即获取二值图中的对象轮廓,也可以简单的认为0和1数据的交界处。
1.3 最大类间方差阈值分割法
为了准确的从背景中筛选出颗粒与气泡,本研究采用了最大类间方差阈值分割算法处理图像。该算法主要是利用灰度直方图的特征来确定灰度分割门限,将图像分成两部分,计算各部分的方差,当组间方差最大时,就以该灰度值为阈值分割图像,分割得到的黑色部分为背景区域,白色部分为目标区域。
由于图像描述及图像分割精度的准确性受分割门限选择的直接影响,因此确定直方图的谷值需要设计一定的准则进行搜索,假设图像的直方图为h,通过搜索找出直方图的两个局部最大值,设它们的位置是Z1和Z2,并且要求这两点距离大于某个设定的距离,然后求出Z1和Z2中的直方图最低点为Zm,利用h(Zm)/min(h(Z1),h(Z2))来检测直方图的平坦性,若该值比较小,则说明得到了双峰一谷状的直方图,可将Zm作为分割门限。
为了得到最佳的分割效果,设图像中有m个灰度值和n个总的像素数,其中灰度值为i的像素数有ni个,用数值k将灰度值分成两组C0=[1…k]和C1=[k+1…m],则C0、C1组对应的概率分别为:w0和w1,C0、C1组的平均灰度值为:u0和u1,整体平均灰度值为u,两组间的方差公式见式(3)。把整体的灰度平均值代入式(3),得出式(4)。
d(k)=w0(u0-u)2+w1(u-u1)2
(3)
d(k)=w0w1(u1-u2)2
(4)
在范围1~m内改变k值,求k*使得d(k*)=max(d(k)),以k*为阈值分割图像。
1.4 最小二乘法拟合圆
由于颗粒是个近似圆的不规则图形,因此需要将其拟合成圆,进而方便求取其坐标位置及半径。利用最小二乘法拟合圆的过程,即在不规则图形周边寻找到一个圆,使圆上各点与不规则图形上对应各点的误差平方和为最小。应用最小二乘法的推导结论,点(Xi,Yi)到圆外侧的残余误差见式(5)。

(5)
令Q(a,b,c)为δi的平方和,从而求得a、b、c,使得Q(a,b,c)的值最小。
2 实例分析
2.1 程序编写及应用
本研究提出应用最大类间方差算法对浮选过程中颗粒与气泡碰撞情况进行检测。首先利用数学形态学的基本算法,将原始图像转化为去噪后的灰度图像,然后通过最大类间方差法,分割出目标区域与背景区域,最后应用最小二乘法,将颗粒与气泡拟合成圆,方便求取坐标信息及半径。在本研究中,对两次颗粒下落位置选择的是识别并跟踪的方法,即分别求取颗粒的坐标信息,然后通过拟合在一张图片中,实现了对颗粒位置的跟踪。
程序编写的具体步骤如图2所示。

图2 碰撞检测程序编写步骤
根据本研究所应用的图像处理方法,以图3所示的颗粒下落过程为例,通过提取下落过程中颗粒与气泡的位置坐标及半径,利用点到直线间的距离与半径做比较的判断方法检测出颗粒下落时是否与气泡发生碰撞。

图3 颗粒下落过程
经过Matlab处理产生的图像如图4所示,图4是将图3中的两个颗粒滴落位置合并在一幅图中,实现了对颗粒的位置跟踪。图4中最上方的十字表示颗粒滴落的起始位置,拟合的小圆表示接近气泡的颗粒,大圆表示气泡。

图4 颗粒与气泡位置提取
程序运行结束后,在Matlab的命令窗口会出现两个颗粒位置坐标信息和气泡的位置及半径信息,同时还会直接显示是否发生碰撞,整理后的结果如表1所示,其中Matlab默认将图像的左上角作为坐标原点计算横、纵坐标值。
2.2 仿真结果分析
应用上述程序对100组颗粒下落图像进行分析,为了验证该程序的可靠性,选取图像的颗粒滴落初始位置横坐标均控制在气泡直径范围内,这样保证了理论发生碰撞的概率为100%。为了计算应用不同方法得到的碰撞概率,设实验的总次数为N,统计得到的发生碰撞次数为M,则碰撞概率表示为式(6)。

(6)
考虑到颗粒下落过程中,截取图3(b)的图像时,颗粒距离气泡的位置选取的不同会影响到碰撞检测的精度,因此按照图5所示的3个下落位置进行截取,分别进行100次试验。其中位置1表示气泡纵坐标与颗粒纵坐标间的差值大于气泡半径,位置2表示气泡纵坐标与颗粒纵坐标间的差值接近气泡半径的一半,位置3表示颗粒纵坐标接近气泡纵坐标的位置。
采用本研究提出的Matlab图像处理检测和碰撞概率计算方法对100组颗粒下落图像进行测试,通过与传统的人工识别和统计结果进行对照(直接观察颗粒下落视频,在3个位置处暂停观察碰撞情况),得出用不同方法检测的准确率如表2所示。

表1 程序运行结果

图5 颗粒距气泡不同位置

表2 颗粒与气泡碰撞发生概率统计(单位:%)
从表2可以看出,利用Matlab检测法统计的碰撞概率明显高于肉眼观察法,这是因为受图像清晰度的影响,人眼并不能识别出颗粒与气泡距离过近的情况下是否发生碰撞。此外,在应用本研究提出的检测碰撞方法的过程中,对于图3(b)的颗粒位置选取至关重要,最佳位置应选在气泡的纵坐标与颗粒纵坐标差值小于气泡半径一半的范围内,这是由于气泡的存在使得气泡周围的液流产生绕流运动,当颗粒选取的较大时,其自身的惯性会减弱该绕流运动,从而使检测结果不受影响;但当颗粒选取的较小时,其绕流运动增强,影响图5(a)、图5(b)位置的检测精度。
3 结 论
通过分析可以得出:利用Matlab提取多张图片的图像信息以及检测碰撞能在短时间内完成,并且统计结果相对传统方法误差更小,因此检测得到的结果更具有可靠性。试验结果表明,通过Matlab图像处理技术及最大类间方差方法可以迅速并高效地检测出了颗粒与气泡是否发生碰撞,该方法与传统的人工统计方法相比,节省了大量工作时间,减少了人为误差,提高了统计结果的准确率,为进一步研究颗粒碰撞行为奠定了基础。
[1] Jiang Z W,Holtham P N. A theoretical model of the collision between particles and bubbles in flotation[J]. IMM,Lodon,Section C,1986,95:187-194.
[2] 张晋霞,张晓亮,牛福生, 等. 不同粒度对赤铁矿可浮性的影响[J]. 中国矿业, 2016, 25(8):122-125.
[3] 覃文庆, 王佩佩, 任浏祎, 等. 颗粒气泡的匹配关系对细粒锡石浮选的影响[J]. 中国矿业大学学报, 2012, 41(3):420-424, 438.
[4] 刘华森, 阳春华, 王雅琳, 等. 微泡浮选中气泡尺寸影响分析与参数优化[J]. 矿业工程研究, 2009, 24(4):58-61.
[5] 张世杰. 煤泥浮选过程中颗粒与气泡碰撞、吸附规律研究[D]. 北京:中国矿业大学(北京), 2015.
[6] Uddin S, Li Y, Mirnezami M, et al. Effect of particles on the electrical charge of gas bubbles in flotation[J]. Minerals Engineering, 2012, 36/38(5):160-167.
[7] D.W.Moolman, C.Aldrich, J.S.J.Van Deventer. The interpretation of flotation froth surfaces by using digital image analysis and neural networks[J]. Chemical Engineering Science, 1995, 50(22): 3501-3515.
[8] 瓜里尼, 左焕莹. 图像处理技术用于评估矿物浮选过程的质量[J]. 国外金属矿选矿, 1999(12):38-41.
[9] 刘晓文. 基于ARM的气泡图像处理系统研究[D]. 天津: 天津大学, 2012.
[10] 张艳玲, 刘桂雄, 曹东, 等. 数学形态学的基本算法及在图像预处理中应用[J]. 科学技术与工程, 2007, 7(3):356-359.
[11] 赵坤, 赵书涛. 数字图像灰度化方法研究[J]. 数字化用户, 2013(16): 200.
[12] 高浩军, 杜宇人. 中值滤波在图像处理中的应用[J]. 电子工程师, 2004, 30(8): 35-36.
A collision detection method of particle and bubble based on Otsu image segmentation
LIANG Xiuman1, FU Dongshuai1, NIU Fusheng2, LIU Zhendong1, ZHANG Jinxia2
(1.College of Electrical Engineering, North China University of Science and Technology, Tangshan 063009, China; 2. College of Mining Engineering, North China University of Science and Technology, Tangshan 063009, China)
In order to detect whether the collision occurs between particle and bubble in flotation accurately, a collision detection method of particle and bubble, which based on morphological image processing and Otsu method, is presented. First of all, It utilizes image pre-processing to optimize images, the target area and the background area are segmented by Otsu method. Then, particles and bubbles are fitted to a circle combined with the least-square method, it’s convenient to obtain the coordinate information and radius. Finally, the position of all particles is extracted to an image, which achieves the particle tracking and avoids the complexity of the continuous frame image tracking. The results indicate that this algorithm can detect the collision between particle and bubble quickly, and the working hours of manual test are saved effectively.
image segmentation; particle; bubble; Otsu method; collision detection
2016-12-23 责任编辑:赵奎涛
国家自然科学基金项目资助(编号:51474087)
梁秀满(1973-),女,副教授,硕士生导师,主要从事检测技术及智能装置方面的科研工作,E-mail:13230857556@126.com。
付董帅(1992-),男,硕士研究生,主要从事检测技术及智能装置方面的科研工作,E-mail:735107357@qq.com。
TD923;TP29
A
1004-4051(2017)06-0127-04
