一种无人机的研究
2017-06-19蔚国飞钟力
蔚国飞+钟力
上海电机学院
【摘 要】本文提出一种既可以像直升机那样实现竖直方向的悬停、垂直起降以及高机动性,同时又可像固定翼飞机那样利用机翼的升力进行相对低能耗的长途奔袭的无人机结构。该无人机可在不同飞行任务下实现变形,并在四叶桨飞行器和固定翼飞行器之间进行切换,从而满足不同环境的需求。
【关键词】无人机;垂直起降;研究
引言
随着无人机相关技术的发展,无人机在对未知领域的勘测及危险区的侦查,尤其是在军事无人探测领域内的應用越来越广泛,作用爷越来越大。由于现代战争的实际情况复杂多变,对无人机提出了更高的要求:既要高机动灵活,又要具备较大的飞行半径。而现有的无人机方案难以满足上述要求。直升机和四叶桨飞行器均可垂直起降,但直升机飞控系统开发复杂、不易维护,四叶桨飞行器能耗大、飞行速度低、飞行半径很小;固定翼飞机飞行能耗小、飞行半径大,但垂直起降与悬停实现复杂,且不适用于狭小地段的侦查。目前的可以实现垂直起降的无人机分为两大类:推力定向式和推力换向式。推力定向式无人机存在机构复杂,不易维护,飞控系统复杂,在长途奔袭时能源耗费较大等缺点;推力换向式无人机要么结构复杂,实现困难,要么机动灵活性能不足。
1.新结构无人机的技术难点与实现
(1)如何保证翼端变形运动到位后锁定:采用二态四杆机构,在转动过程中,为滑块摇杆机构;在摇杆运动到极限位置时,利用推杆端部和转动杆顶部之间的摩擦,起到定位锁定的功能;
(2)如何保证各个电机更好地协调:利用陀螺仪来辅助控制各个电机的转速;
(3)在四叶桨飞行器状态下,如何控制飞机在航向上转弯:在涵道下方安装导流板,通过调整导流板的角度来实现转弯。
2.无人机的结构
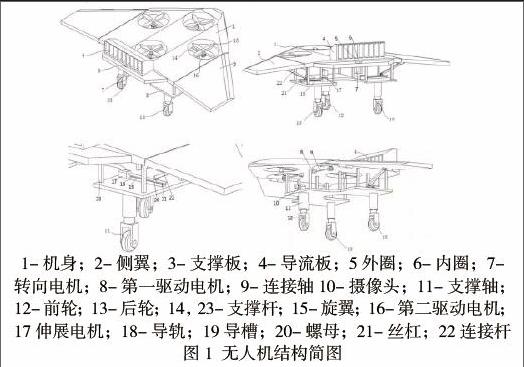
新结构无人机采用叶桨为动力,可以像直升机和四叶桨飞行器那样竖直悬停,垂直起降;而在巡航飞行时,2个叶桨可以翻转90°,同时,翼端可以展开,此时,无人机变形为三角翼布局的固定翼飞机。其结构包括:主体,伸展单元,驱动单元和转向单元等部分。主体包括机身1,位于机身下方的支撑以及位于支撑板下方的转轮;伸展单元包括铰接于主体两侧的侧翼2以及驱动侧翼旋转的伸展电机17;驱动单元包括固定于机身的多个旋翼15、分别驱动每个旋翼转动的多个第一驱动电机8以及分别驱动每个旋翼转动方向发生改变的多个第二驱动电机16;转向单元包括固定于机身端部的导流板4以及驱动导流板旋转的转向电机7。机身和支撑板是通过多根支撑杆14和23等进行固定;在支撑板上且靠近支撑板的前端固定设置有摄像头10;在支撑板后端的左右两侧固定伸展电机17,在伸展电机一侧的支撑板上安装导轨18,导轨设有导槽19;螺母20的底部嵌于导轨的导槽内,螺母的中部的内螺纹通孔套于丝杠21上,螺母的顶部的铰链与连接杆22的底部铰接;连接杆的顶部的铰链与侧翼下部铰接;旋翼的底部与第二驱动电机17固定相连;在机身的下方固定有第一驱动电机8;导流板4通过轴承固定在机身上,轴承的外圈5与导流板4底部固定相连,轴承的内圈6与机身固定相连。其结构如图1所示。
3.无人机的实施
操作者调试好无人机的初始设置状态,打开四个第一驱动电机,此时无人机可以垂直的进行升空,再通过控制第二驱动电机将两侧的旋翼进行90度的旋转,此时无人机可以前进,然后通过控制转向电机,可以左右转动导流板,可以根据要求进行合适的转向,在整个飞行过程中,支撑板前部的摄像头实时的进行拍摄并通过无线传输将讯息传递给操作者,当操作完毕时,再通过控制第二驱动电机反转旋翼90度,此时可以进行垂直的下降。
当无人机垂直起降或者需要减小无人机尺寸时,其翼端折叠,为四叶桨飞行器;当巡航飞行时,翼端展开、涵道翻转90°时为固定翼飞行器;当垂直起降时,翼端折叠,4个叶桨作为动力,构成四叶桨飞行器,可以轻松实现垂直起降功能,同时折叠的机翼可以作为起落架使用;在巡航飞行时,两个叶桨翻转90°,推动无人机飞行,其它两个叶桨关闭,可以节省能耗;同时,翼端展开,构成三角翼气动布局,便于巡航飞行,具有较高的飞行速度和较大的飞行半径。
参考文献:
[1]查海卫、辛绍杰,张婧,李林冬,蔚国飞,陈睿.无人机.中国,ZL201510490493.6[P] 2017年5月17日.
作者简介:
蔚国飞,男,上海电机学院机械设计制造及其自动化专业,本科生。
钟力,女,上海电机学院机械学院副教授。
