基于SPRT的组合导航故障检测与隔离互辅算法*
2017-06-19赵修斌庞春雷仝海波
张 闯,赵修斌,庞春雷,冯 波,仝海波
(空军工程大学信息与导航学院,西安 710077)
基于SPRT的组合导航故障检测与隔离互辅算法*
张 闯,赵修斌,庞春雷,冯 波,仝海波
(空军工程大学信息与导航学院,西安 710077)
针对SPRT(序贯概率比检验)算法无法准确判断缓变故障结束时间的问题,提出了一种故障检测与隔离互辅算法。采用SPRT算法对滤波残差进行故障检测,确认故障后隔离故障观测量,重新建立卡尔曼滤波观测方程并完成量测更新,将隔离后的滤波结果作为下一时刻的滤波初值辅助故障检测。仿真结果表明,该方法能准确定位故障观测量并判断出故障的结束时间,提高了系统可靠性。
组合导航,序贯概率比检验,故障检测与隔离,互辅算法
0 引言
卫星导航着陆系统是未来飞机精密着陆的发展方向,为提高卫星着陆系统对飞机高精度、高可靠性需求的保障能力,常采用机载其他导航系统进行辅助,较常用的是通过惯性导航与卫星导航的组合,进行系统的故障检测,提高系统的精度和可靠性。
目前组合导航系统比较成熟的故障检测方法主要是基于卡尔曼滤波器的检验法,该方法仅能确定一组测量值的有效性,是一种系统级故障检测算法,并不能确定造成故障的具体原因[1-2]。检验法包括残差检验法、状态检验法、双状态检验法[3]。残差检验法对于突变的硬故障具有较好的检测效果,但是不易检测出慢变故障,存在较大的延时;状态检验法对于缓变故障检测更为灵敏,但是由于递推滤波器没有进行量测更新,随着时间的增加,其灵敏度也会降低;双状态检验法采用两个状态递推器,交替利用卡尔曼滤波器的结果进行重置,作为故障检测参考系统,但是选取合适的重置切换时间比较困难,且该方法计算量较大[4]。
序贯概率比检验是残差判决中一种较为常用的方法[8],相比于残差检验法,该方法更适合软故障检测[9]。文献[10]采用序贯概率比法对组合导航系统进行故障检测,但是该方法在故障结束后其监测值仍需要一定的时间才能恢复正常[11],造成了误警现象。本文基于改进的SPRT算法,提出了一种新的故障检测与隔离模式,通过故障检测与故障隔离相互辅助实现了对系统故障的有效处理。
1 改进序贯概率比检验法(SPRT)

则观测序列必属于两个样本类H0和H1之一,且有:
于是,可得其似然比为:

对上式取自然对数,得对数似然比为

进而得到似然比的递推计算公式为
检验阈值的计算与Wald序贯概率比算法一致为:
其中,Pf为误警概率,Pm为漏警概率。
则故障判决准则为
2 基于改进SPRT的故障检测与隔离互辅算法
改进的SPRT算法采用迭代递推的方法来计算故障检验函数,对于慢变的斜坡故障具有较高的灵敏度。但也正因为采用迭代递推法,当故障消失后,由于其对缓变故障的跟踪特性[12],会对之后一段时间的故障检验值产生影响,需要经过较长的时间才能恢复,从而无法准确判断故障的结束时间,造成了误警现象。
另外,由于改进的SPRT算法在对系统进行故障检测时,需要对残差向量每一维状态分量进行检测,当其中任何一维的故障检验值超过门限时,即发出告警信息,判断系统出现故障。SINS/GPS松组合导航系统中,选取三维位置和三维速度作为观测量,在进行卡尔曼滤波时,其残差向量为六维,当对其中任何一维观测量引入故障后,由于残差向量各分量之间的相关性,会对其他几维残差分量的统计特性造成影响,导致误警现象的发生。以在高度观测量上加入故障量为例,进行仿真实验,组合滤波残差向量各分量的结果如下页图1所示。
从图中可以看出,在高度观测量上加入故障后,故障对残差各分量的影响并不相同,其中高度分量影响最大,在故障发生期间和故障结束后其统计特性发生了较大变化,严重偏离正常值;此外,与高度分量对应的天向速度分量,其统计特性较正常值也发生了较为明显的变化;其他几个分量也发生了一定程度的变化。因此,采用改进的SPRT检测算法对系统进行故障检测时,在检测出故障后,单纯地弃用故障系统对故障进行隔离,不仅其迭代递推法的跟踪作用会导致误警,残差向量分量的故障检测值也有可能超出阈值造成误警。因此,选取有效的故障检测与隔离方式对于提高系统故障检测能力和导航定位精度尤为重要。
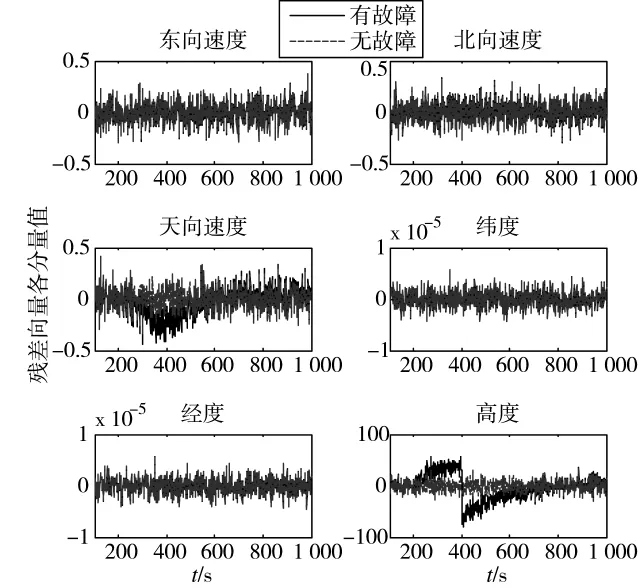
图1 卡尔曼滤波残差
基于此,本文对该方法作以下改进:
①故障检测:在组合系统完成卡尔曼滤波时间更新后,采用改进的SPRT算法计算残差向量各分量的故障检测值记为(ik)(i=1,2…6),将计算得到的值与检测阈值T(H1)进行比较,若不存在i,使得(ik)≥T(H1),则判断系统无故障;若存在i,使得(ik)≥T(H1),则判断系统出现故障,且与该残差分量对应的观测量Z(ik)存在故障,从而实现了系统故障的确认。
②故障隔离:通过故障检测确认系统故障后,在卡尔曼滤波量测更新过程中,去掉该维故障观测量,重新建立卡尔曼滤波观测方程,利用剩余的观测量进行卡尔曼滤波量测更新,得到新的滤波残差向量ε、新的状态估计和估计方差由于去掉了故障观测量,残差向量ε的维数会减小,在此将去掉观测量所对应的残差量取0进行补充得到ε*。
改进算法的原理如图2所示:
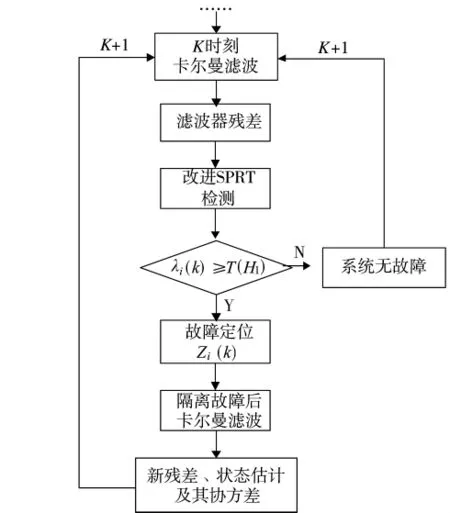
图2 故障检测与隔离原理图
可以看出,本文算法的核心是将故障检测与隔离模式由传统的故障检测—隔离故障改为故障检测—隔离故障—故障检测,将单向的故障检测来辅助故障隔离变为双向的故障检测与故障隔离互相辅助,从而实现了对系统故障的有效处理。
3 算法仿真分析
仿真轨迹为飞机起降轨迹,包括匀加速、爬升、转弯、匀速平飞、俯冲等运动状态,假设陀螺随机常值漂移为0.1°/h,加速度计随机常值漂移为10 μg,飞机的初始位置为东经108°,北纬34°,高度0 m,初始速度为0,航向正东。GPS位置误差为10 m,速度误差为0.1 m/s,仿真飞行时间为1 600 s。
为验证本文故障检测及隔离算法的有效性,人为设置故障状况,在200 s~400 s时间段上对GPS高度观测量加入速率为0.4 m/s的缓变故障。设定误警概率Pf=0.1,漏警概率Pm=0.1,则可得检验阈值T(H1)=2.197。对传统改进SPRT算法和本文所提算法的故障检测效果进行对比,其中传统改进SPRT算法为采用改进SPRT算法检测到故障后,直接弃用故障系统来隔离故障。两种算法的故障检测效果分别如下页图3、图4所示。
由图3可知,采用传统改进SPRT故障检测与隔离算法对系统进行故障检测时,能够在较短时间内检测出故障,但是当故障结束后,由于递推跟踪效果,其故障检测值下降到正常水平存在着一段时间的延迟,造成了误警现象;另外,由于在高度上加入了故障,引起了除高度分量外的其他残差分量(如图中天向速度和北向速度分量)的变化,造成了故障检验值超出检验阈值发生误警的现象,且误警时间过长。
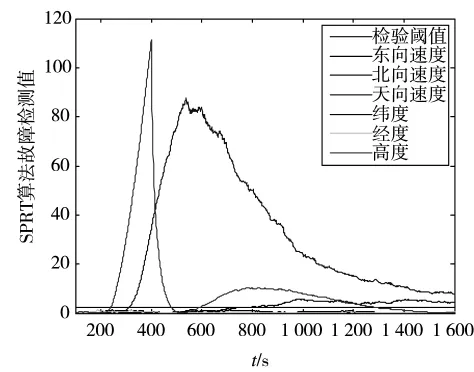
图3 改进SPRT算法故障检测曲线
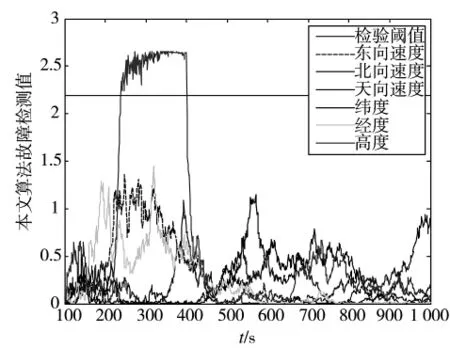
图4 本文算法故障检测曲线
而采用本文算法进行故障检测与隔离,能够与常规方法在相同时间延时内检测出缓变故障,同时,在确认高度观测量故障后,通过弃用该故障观测量,采用剩余的正常观测量进行滤波量测更新,极大地减小了故障对其他几维残差分量的影响;利用新的残差向量计算故障检测值,有效解决了传统算法迭代递推作用的影响。两者共同作用,实现了对系统故障的有效隔离,因而能够准确判断故障结束时刻,没有造成误警现象。
为进一步验证本文故障检测与隔离算法对故障的处理能力,对发生故障后采用本文故障检测与隔离算法、不进行故障隔离和系统无故障的组合滤波结果进行比较,得到位置误差和速度误差结果如图5、图6所示。
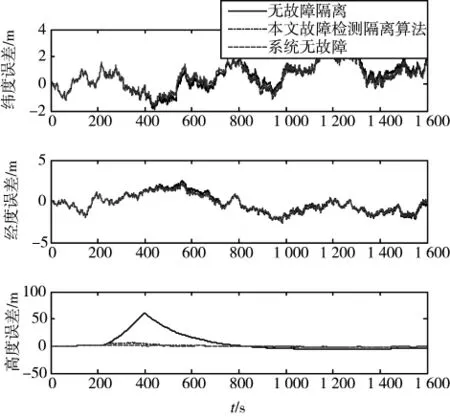
图5 位置误差对比
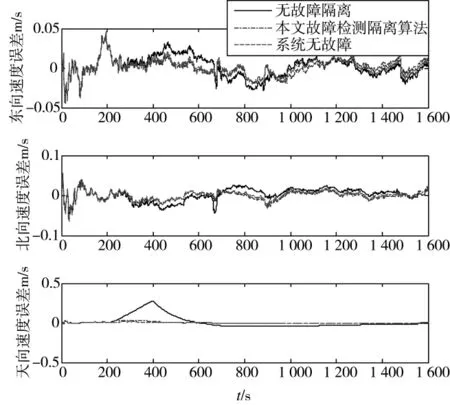
图6 速度误差对比
由图可知,采用本文算法对系统故障进行检测与隔离后,在故障发生期间,能极大地减小故障对组合滤波结果的影响,其精度略低于系统无故障情况下的水平,当故障结束后,能够迅速恢复到正常水平。
4 结论
本文分析了改进SPRT算法在组合导航系统缓变故障检测中存在的不足,在此基础上提出了一种故障检测与隔离互相辅助的新方法。仿真结果表明,新方法能够有效解决传统方法存在的迭代跟踪问题,准确判断故障发生的位置及故障结束时刻,减少了误警现象,提高了系统对故障的处理能力,保证了系统准确可靠。
[1]靳星,宋华,邱红专,等.基于Fuzzy ARTMAP的GPS/INS组合导航系统故障诊断[J].宇航学报,2011,32(9):1902-1910.
[2]LEE W,PARK C G.A Fault detection method of redundant IMU using modified principal component analysis[J].Int’t J of Aeronautical&Space Sci,2012,13(3):398-404.
[3]赵鑫,秦红磊,丛丽,等.基于ARCH模型的组合导航缓变故障容错方法[J].解放军理工大学学报(自然科学版),2014,15(6):519-526.
[4]韩瑞,秦红磊.JIDS/SINS/GPS组合导航系统两级故障检测结构设计[J].航空电子技术,2008,39(3):43-49.
[5]高关根,程农.改进的残差检验法在组合导航系统故障检测中的应用[J].系统仿真学报,2009,20(增):341-344.
[6]张志鑫,张峰.基于状态递推器的改进型残差检测法[J].中国惯性技术学报,2009,17(1):107-110.
[7]张垚,刘莹莹,周军.基于小波变换的状态改进检测算法及其应用[J].中国惯性技术学报,2013,21(1):136-140.
[8]刘昆明,曾庆华.序贯概率比检验用于残差检测的一种改进方法[J].电光与控制,2009,16(8):36-39.
[9]熊智,邵慧,华冰,等.改进故障隔离的容错联邦滤波[J].航空学报,2015,36(3):929-938.
[10]JARMANKD,SMITHLE,CARLSONDK.Sequentialprobability ratio test for long-term radiation monitoring[J].Nuclear Science,IEEE Transaction,2004,51(4):1662-1666.
[11]杨镜,华冰,熊智.多源导航系统软、硬故障检测新方法研究[J].压电与声光,2013,35(5):647-652.
[12]KAJENSKI P J.Firm track range estimation with truncated sequential tests[J].IET Radar,Sonar and Navigation,2011,5(4):436-440.
Interact Arithmetic of Fault Detection and Isolation Based on SPRT for Integrated Navigation
ZHANG Chuang,ZHAO Xiu-bin,PANG Chun-lei,FENG Bo,TONG Hai-bo
(School of Information and Navigation,Air Force Engineering University,Xi’an 710077,China)
The SPRT(Sequential Probability Ratio Test)algorithm can not judge the ending time of gradual changing fault accurately.To solve this problem,a interact arithmetic of fault detection and isolation is proposed.The SPRT algorithm is used to detect the fault.After determining the faulted observed value,it is isolated.Then the kalman filter measurement equation is rebuilded and the measurement update is accomplished.The new filter result is used as the initial estimate of next time to help the fault detection.The simulation results show that this algorithm can determine the faulted observed value and the ending time of the fault,and it can effectively improve the reliability of the integrated navigation system.
integrated navigation,sequential probability ratio test(SPRT),fault detection and isolation,interact arithmetic
U666.1
A
1002-0640(2017)05-0068-04
2016-03-17
2016-05-18
国家自然科学基金资助项目(61273049)
张 闯(1992- ),男,湖北天门人,硕士。研究方向:组合导航技术研究。