基于单神经元的永磁同步电机自适应PSD速度控制
2017-06-19李长红
黄 继,罗 航,郭 婧,李长红,高 佳
(1.山西大学 自动化系,山西 太原 030002;2.解放军96421部队,陕西 宝鸡 721012;3.西北机电工程研究所,陕西 咸阳 712099)
基于单神经元的永磁同步电机自适应PSD速度控制
黄 继1,罗 航2,郭 婧3,李长红3,高 佳1
(1.山西大学 自动化系,山西 太原 030002;2.解放军96421部队,陕西 宝鸡 721012;3.西北机电工程研究所,陕西 咸阳 712099)
为了解决伺服系统电机或负载参数发生变化时对控制带来的影响,提出了一种永磁同步电动机(PMSM)的单神经元自适应速度控制方法,引入速度误差、误差的一次差分及误差的二次差分作为单神经元的输入信号,并设计相应的加权系数和学习规则,给出了单神经元实现的Simulink框图,针对PMSM的矢量控制系统,采用MATLAB进行了单神经元自适应PSD速度控制仿真及电机试验台架的试验验证,仿真和试验结果验证了该方法的可行性。
永磁同步电机;单神经元;矢量控制;速度控制
永磁同步电动机具有体积小、质量小、结构简单、维护方便以及运行可靠等优点,因此在高性能的交流传动系统中具有很好的应用前景,在工业、航空航天、国防领域得到了广泛的应用,如数控机床,天线、雷达跟踪伺服系统等。由于永磁同步电机输入至输出一般是多变量、非线性、强耦合的,按照经典的PID控制器很难取得良好的参数匹配[1-2],同时,系统参数会随环境的变化发生改变,如当温度变化时,电阻、电感、粘滞摩擦系数发生变化,或当转动惯量发生变化,控制性能均会受到一定程度的影响,对此,不少学者将先进控制理论引入到永磁同步电机的控制中,如非线性控制[3-4]、智能控制[5]、以及系统辨识的技术[6-7]等,但算法复杂不便于数字实现。
近年来, 神经元自适应PID 控制器因具有算法简单、易于实时控制等优点, 得到了广泛的应用。而神经元自适应PSD 控制器由于能够在线调整神经元比例系数, 具有比前者更好的自适应能力[8]。
Marsik 和Strejc根据控制过程的几何特性建立性能指标, 提出了自适PSD(比例、求和、微分)控制。这种方法无需辨识对象的参数, 只要检测系统误差就可以形成闭环控制。笔者基于单神经元的自适应PSD控制方法,具有控制简单、对被控对象参数变化不敏感、易于实现的特点,可有效提高系统的鲁棒性。
1 PMSM电机数学模型及其系统结构
设永磁同步电动机工作采用Y型连接,设A相、B相以及C相的电压分别为uA、uB和uC,而三相电流分别为iA、iB和iC。设由A-B-C轴到d-q轴的变换阵为:
(1)
可得到d、q轴的电压和电流:
[UdUq]T=P[uAuBuC]T
(2)
[IdIq]T=P[iAiBiC]T
(3)
永磁同步电机在d-q坐标系下的状态方程为
(4)
转矩方程为
Te=1.5p[ΨrIq+(Ld-Lq)IdIq]
(5)
式中:Ld、Lq分别为d轴和q轴的电枢电感;R为定子绕组的电阻;Id、Iq分别为d轴和q轴电流;Ud、Uq分别为d轴和q轴电压;ωr为转子的角速度;Ψr为转子磁极磁通;p为极对数;Te为电机电磁转矩。
为了实现转矩的线性化控制,这里采用Id≡0的控制方案,这时转矩和电流的关系将简化为
Te=1.5pΨrIq
(6)
图1给出了PMSM调速系统控制的整体框图,整个调速系统由电流环和速度环两个部分,由于电流环的时间常数小于速度环的时间常数,因此在实际控制中,电流环要做到响应速度快,需要实时性高,运算量不能太大,因此电流调节器采用常规的PI调节器,并采用基于d-q同步旋转坐标下的PI调节,能保证电流跟踪稳态误差为0。速度环采用单神经元PSD控制,用以克服包括电流环在内的系统参数的慢时变、非线性等不利因素,可提高系统的鲁棒性。

2 单神经元自适应PSD算法
图2为单神经元PSD控制的结构框图,该控制器是通过对加权系数的调整来实现自适应、自组织功能。x1、x2、x3以及W1、W2、W3分别为控制器的输入及其相应的加权系数,W1~W3的右上角的箭头表示其为可调节的参数。
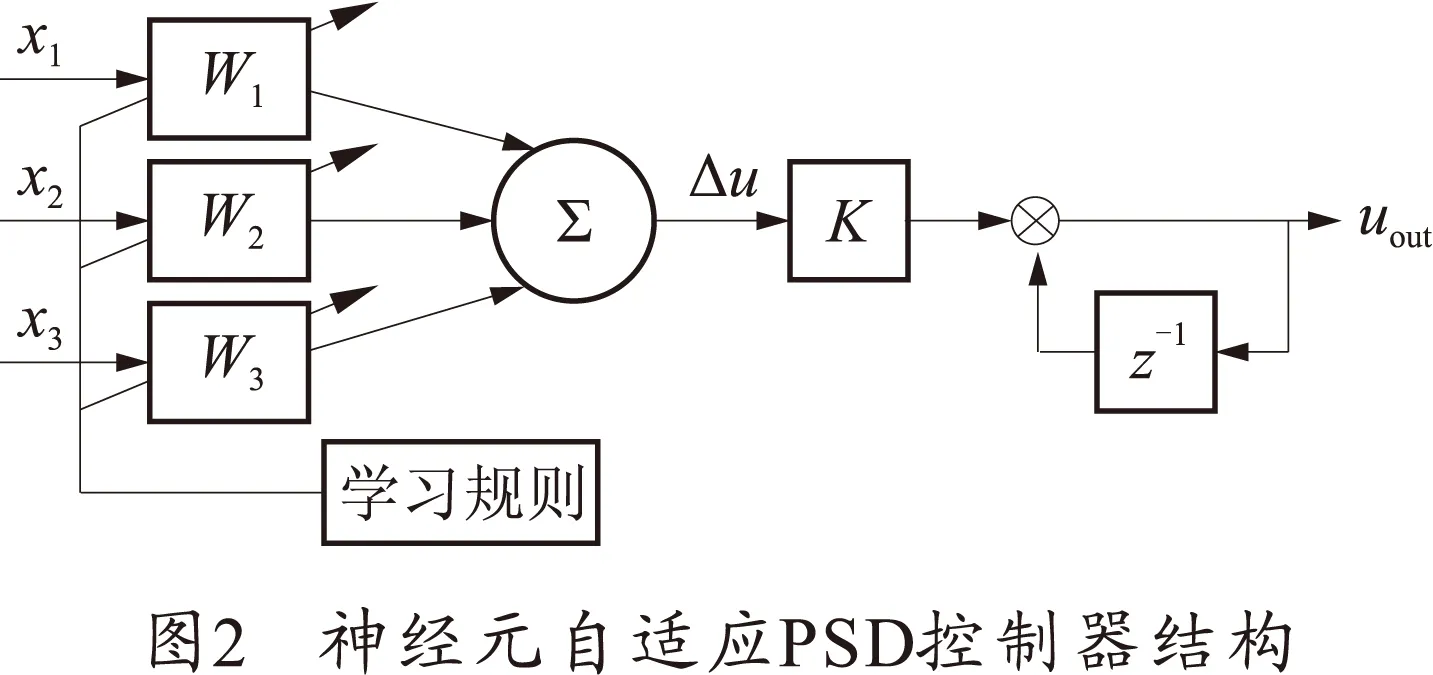
控制器的输出及学习规则可表示为
(7)

(8)
式中:e(k)是误差信号;z(k)是教师信号,取z(k)=e(k);η1为积分学习速率;η2为比例学习速率;η3为微分学习速率。
控制器的输入分别为误差、误差的一次差分和误差的二次差分,即
(9)
学习速率ηi的取值对于单神经元PSD控制系统的运行会产生较大的影响,学习速率较大会导致系统运行不稳定,学习速率较小会导致系统的收敛速度很慢。而在系统运行过程当中,如果学习速率不变,则会导致系统容易陷入局部最优,因此可采用自调整学习速率,算法如下:
(10)
3 仿真和试验验证
针对图1所示的控制系统,首先进行了MATLAB仿真研究,应用Power System Blockset工具箱搭建PMSM控制系统,其中,单神经元速度控制器的Simulink仿真模型如图3所示,仿真电机参数:R为2.8 Ω,Ld为8.3 mH,Lq为8.3 mH,Ψr为0.18 Wb,p为4,J为0.8×10-3kg·m2,母线电压为直流400 V。
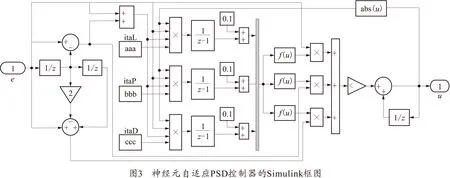
图4~9分别给出了当速度环采用神经元自适应PSD控制器,速度输入为400 rad/s时,产生的阶跃响应的转速波形、转矩波形、d轴和q轴的电流波形以及PMSM电机的线电流波形与线电压波形。
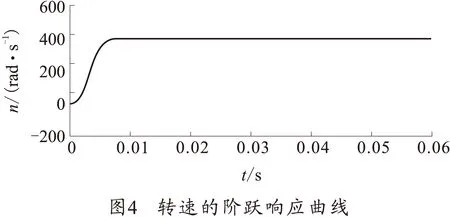
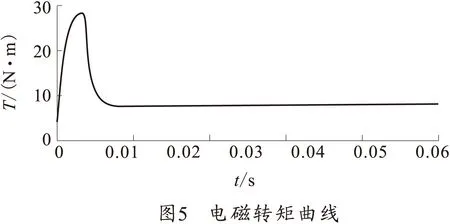
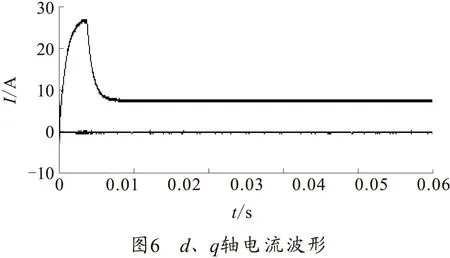
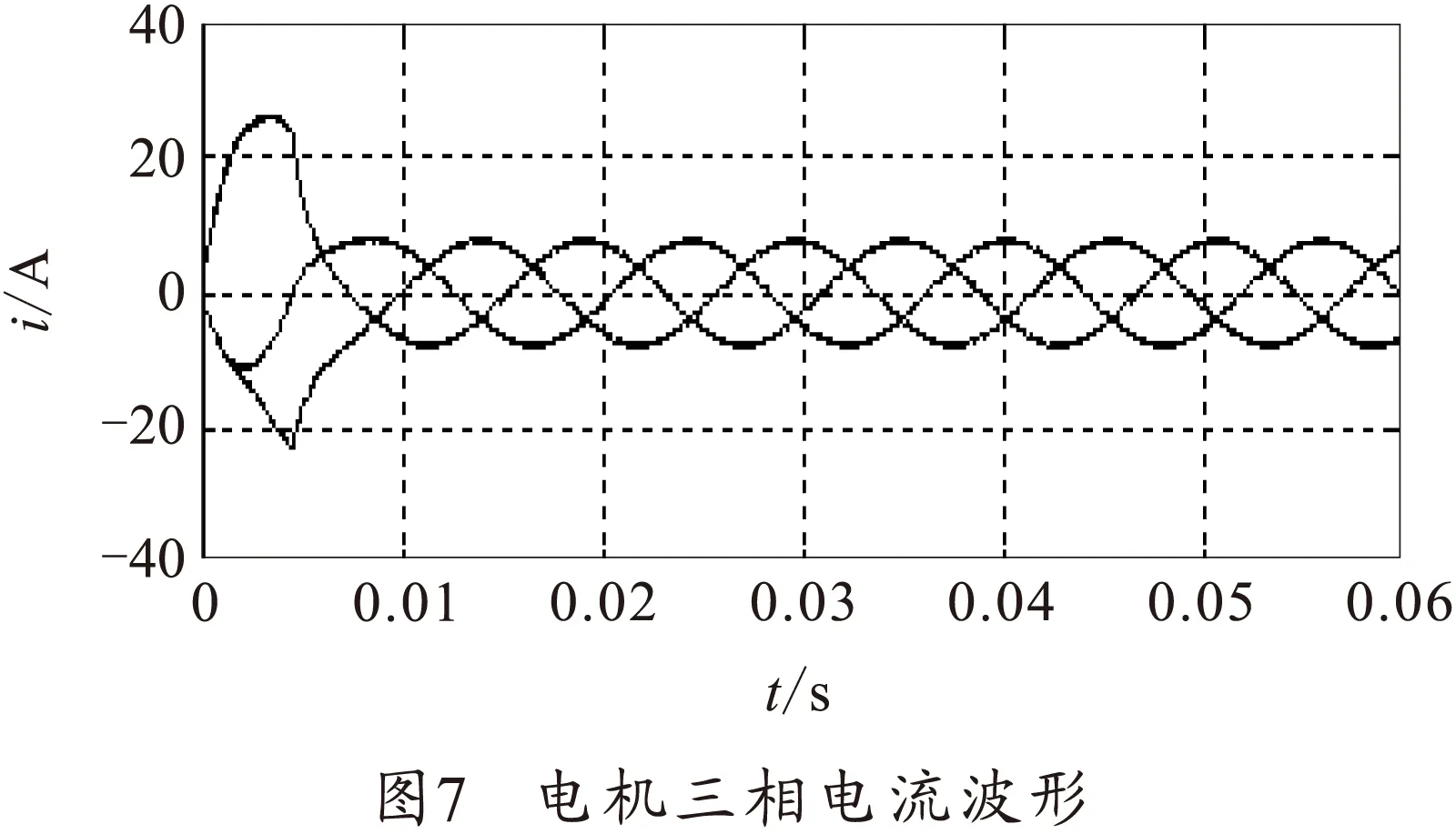
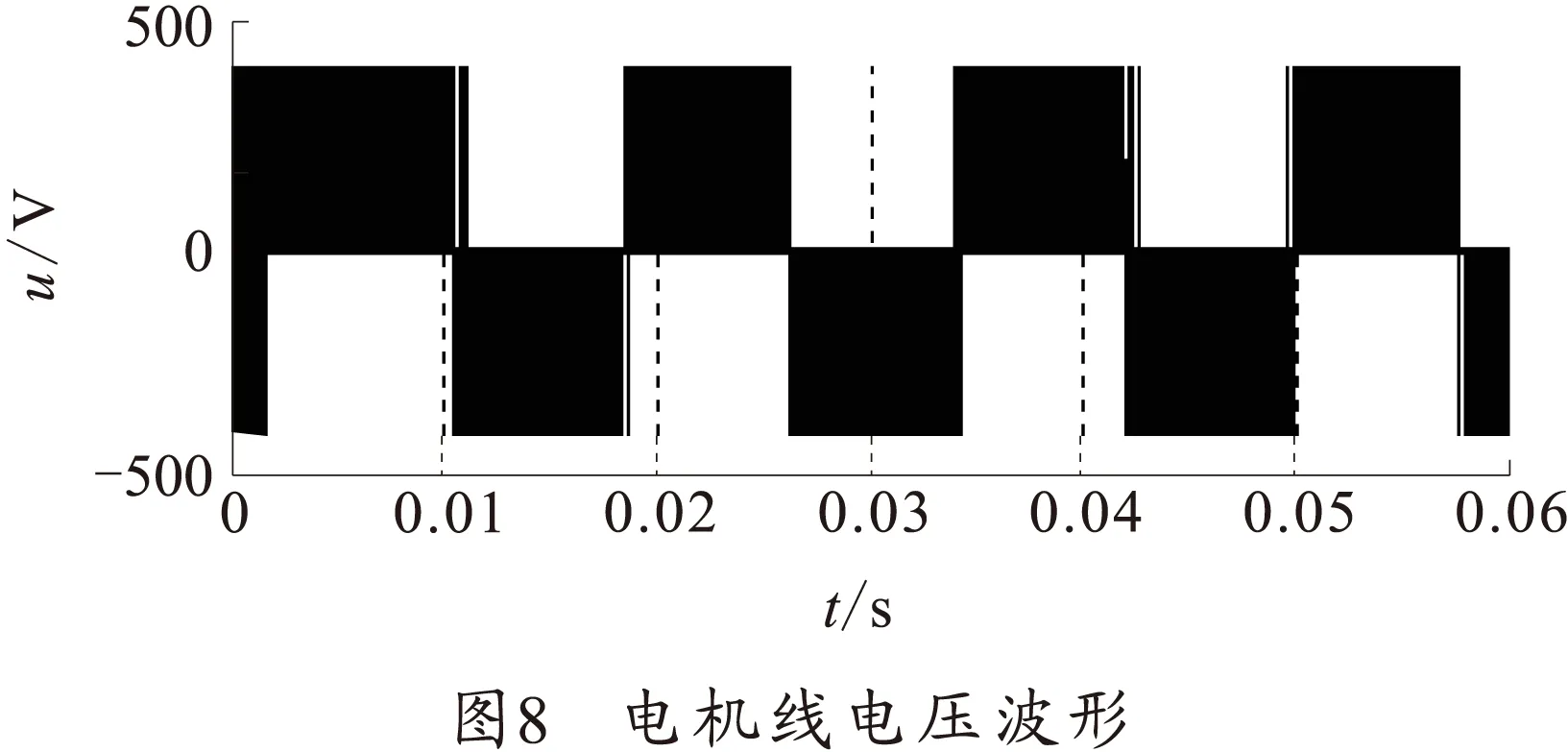
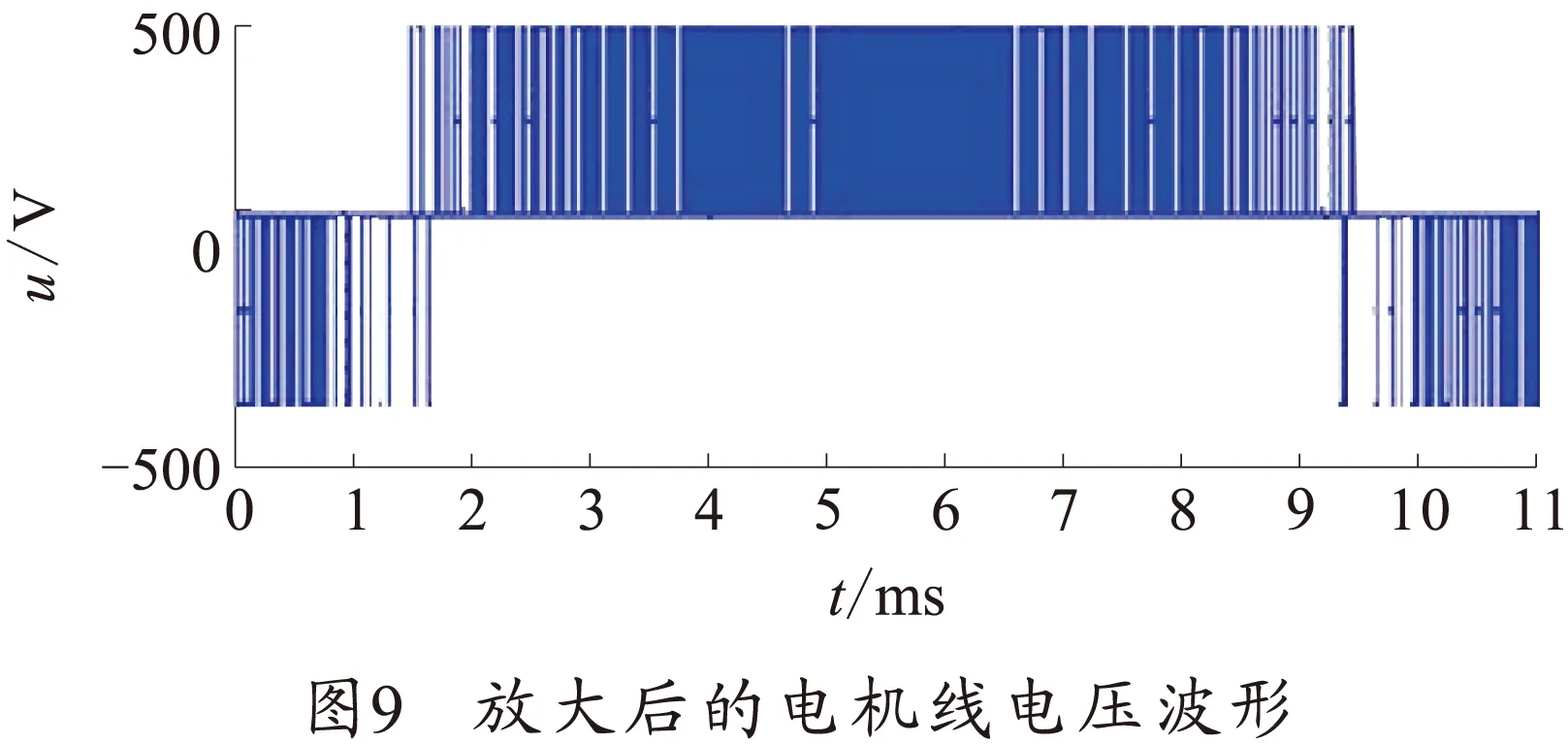
由图4~9可知,在电机启动的时候电流较大,启动之后电机进入加速过程,电流幅值迅速减小,当速度到达指令速度时,电机匀速旋转,电流减小直至不变。相电流波形正弦度高,转矩波动小,转速响应速度快,系统过渡过程平稳, 稳态误差小,使PMSM调速系统取得良好的动静态性能。
为了进一步验证本文方法,开发了基于TI公司DSP2407的永磁同步电机的试验平台,如图10所示。
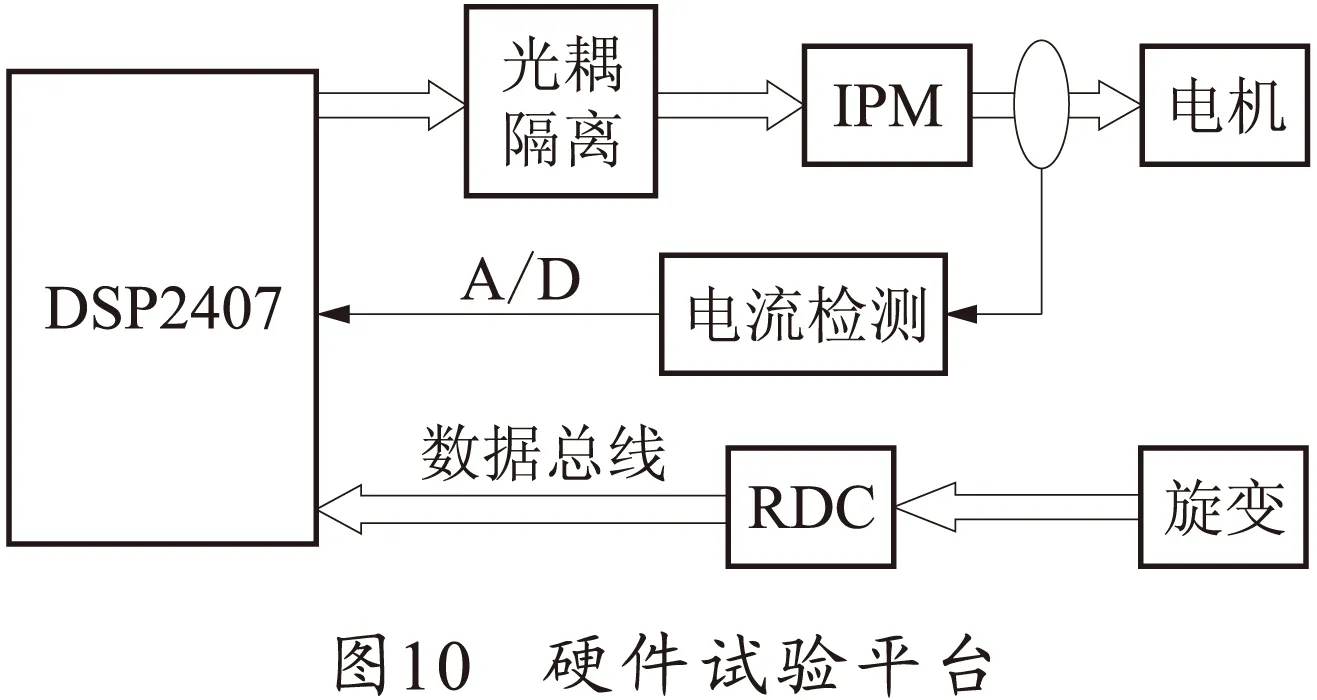
功率主回路采用三菱公司的IPM,型号为PM300CLA060,最大电流300 A,耐压600 V,采用霍尔检测电机A相和B相电流,通过A/D采集进入DSP,实现电流反馈,利用旋转变压器(旋变)检测电机角度,经过RDC芯片(AD2S83)将旋变采集角度转化成数字量,通过数据总线送进DSP,用于完成矢量变换和速度控制。试验中选用西安微电机研究所生产的电机,参数为:定子电阻0.014 Ω,定子电感0.33 mH,力矩系数有效值0.116 N·m/A,试验中母线电压为56 V,试验中的速度调节器采用了单神经元PSD控制器,并进行了速度阶跃响应试验,图11给出了采用本文方法时电机在800 r/min的转速和电流波形。
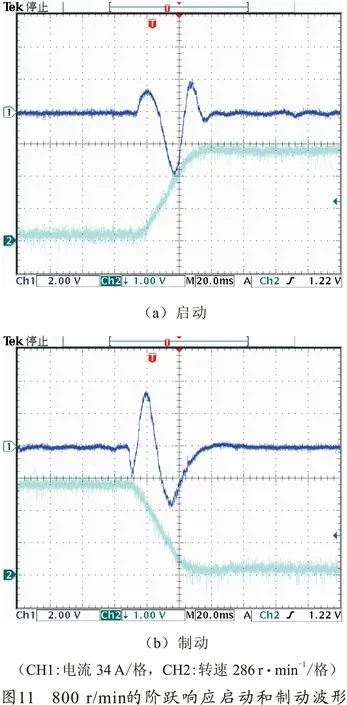
由仿真和试验曲线可以看出,当采用单神经元自适应PSD控制器时,速度响应平滑,无超调,能很好地适应当电机参数发生缓慢变化时对控制性能带来的影响,因而该控制方法能提高伺服系统的鲁棒性,进而能提高PMSM控制系统的整体性能。
4 结束语
笔者介绍的基于永磁同步电动机(PMSM)的神经元自适应PSD速度控制的新方法,一方面解决了电机模型不准确所带来的控制精度难以得到提高的问题;另一方面,可很好地解决由于环境的改变导致电机绕组电阻、电感和粘滞摩擦系数等参数变化以及系统转动惯量的变化对控制性能带来的影响。采用本文控制方法时,可通过其学习算法不断地适应周围环境和负载的变化,能有效提高交流调速系统的精度和鲁棒性,该算法实时性好,通过DSP定点运算速度快,可满足实际的采样时间要求,具有很好的工程实用性。
References)
[1]陶永华,尹怡欣,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,1998. TAO Yonghua,YIN Yixin,GE Lusheng. New PID control and its application[M].Beijing: China Machine Press,1998.(in Chinese)
[2]刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003. LIU Jinkun. Advanced PID control and its MATLAB simulation[M].Beijing:Publishing House of Electronics Industry,2003.(in Chinese)
[3]祝晓辉,李颖晖,陈亚滨. 基于非线性状态观测器的永磁同步电动机无位置传感器矢量控制[J]. 电工技术学报,2010,25(1):50-57. ZHU Xiaohui,LI Yinghui,CHEN Yabin. Sensorless vector control for PMSM based on nonlinear state observer[J].Transactions of China Electrotechnical Society, 2010,25(1):50-57.(in Chinese)
[4]史婷娜,张必军,刘涛,等.五桥臂逆变器驱动的双永磁同步电机系统占空比优化调制策略[J]. 中国电机工程学报, 2015,35(6):1498-1507. SHI Tingna,ZHANG Bijun,LIU Tao,et al. Duty cycle optimization modulation strategy for a five-leg-inverter sup-plying two PMSM system[J].Proceedings of the CSEE, 2015,35(6):1498-1507.(in Chinese)
[5]MOSLEH M, HARTHI A. Control of permanent magnet synchronous motor using artificial neural networks[J]. Advances in Electrical Engineering Systems,2012,1(3):157-162.
[6]ICHIKAWA S, TOMITA M, DOKI S, et al. Sensorless control of permanent magnet synchronous motors using online parameter identification based on system identification theory[J]. IEEE Transactions on Industrial Electronics, 2006, 53(2): 363-372.
[7]CHEN Wei,CHEN Yankun,LI Hongfeng,et al.Sensorless control of permanent magnet synchronous motor based on sliding mode observer[C]∥IEEE 7th International Power Electronics and Motion Control Conference. Harbin:IEEE,2012:245-253.
[8]王顺晃, 舒迪前.智能控制系统及其应用[M].北京:机械工业出版社, 1995. WANG Shunhuang,SHU Diqian. Intelligent control system and its application[M].Beijing: China Machine Press,1995.(in Chinese)
Study of Permanent Magnet Synchronous Motor AdaptivePSD Speed Control Based on Single Neuron
HUANG Ji1, LUO Hang2, GUO Jing3, LI Changhong3,GAO Jia1
(1.Automation Department, Shanxi University, Taiyuan 030002, Shanxi, China;2.No. 96421 Unit of PLA, Baoji 721012, Shaanxi, China;3.Northwest Institute of Mechanical & Electrical Engineering, Xianyang 712099, Shaanxi, China )
In order to solve the effects when the motor parameters or the load vary to servo system control performance, a single neuron adaptive speed control method is presented for permanent magnet synchronous motor (PMSM). Speed error, first order difference of speed error and second order diffe-rence of speed error are introduced as the input singles of single neuron with weighting coefficients and learning rule designed and the Simulink block diagram for realizing of single neuron offered. In response to a PMSM vector control system, single neuron adaptive PSD speed control simulation is exe-cuted via MATLAB with experiment verification carried out on PMSM test bed. The simulation and experiment results verify the validity of the control method.
permanent magnet synchronous motor, single neuron, vector control, speed control
2016-03-15
陕西省工业科技攻关计划项目资助(2016GY-031)
黄继(1975—),男,博士,主要从事嵌入式系统及智能控制技术研究。E-mail:125457969@qq.com
10.19323/j.issn.1673- 6524.2017.02.005
TM921.5
A
1673-6524(2017)02-0020-05