Rényi信息增量和协方差联合控制的多传感器管理算法*
2017-06-19彭冬亮吕鹏飞
祝 武,彭冬亮,任 刚,吕鹏飞
(1.通信信息传输与融合技术国防重点学科实验室,杭州 310018;2.杭州电子科技大学,杭州 310018)
Rényi信息增量和协方差联合控制的多传感器管理算法*
祝 武1,2,彭冬亮1,2,任 刚1,2,吕鹏飞1,2
(1.通信信息传输与融合技术国防重点学科实验室,杭州 310018;2.杭州电子科技大学,杭州 310018)
针对目标跟踪中雷达组网场景下多传感器管理问题,结合Rényi信息增量和协方差两种算法各自特性,利用并行处理的思想提出了一种基于Rényi信息增量和协方差联合控制的传感器管理算法。在具体仿真设计环节,分为传感器跟踪能力大于目标数和传感器跟踪能力小于目标数两种场景。仿真结果表明该算法在单目标匀速、多目标匀加速等多数场景下能够对目标进行有效跟踪,同时降低了传感器的切换频率,具有更好的实时性。
多传感器管理,Rényi信息增量,协方差控制,并行处理
0 引言
多传感器管理核心是依据目标信息的变化,实时调整传感器系统中传感器工作方式及参数,以期获得整个系统度量特性(如检测概率、跟踪精度、识别概率等)的最优值从而完成特定任务[1]。雷达组网下的传感器资源管理是基于不同任务合理分配传感器资源以期获得目标的最优状态信息。信息融合中传感器管理的核心是融合处理,在具体的作战系统中通常由各种算法来实现。目前解决多传感器管理的方法主要有:基于协方差控制的方法[2],基于信息论的方法[3],基于规划论和智能优化算法的方法[4]。
传统协方差控制的传感器管理方法主要利用当前目标状态下的误差协方差和期望协方差组建目标函数对雷达组网下的传感器资源进行分配,通常能够有效保持目标的跟踪精度,但协方差控制中目标期望协方差由人为给出容易存在偏差切,当目标跟踪精度要求过严时易导致目标函数无解或不存在最优解[2];其次算法通常在传感器资源充足的情况下得到理想传感器管理方案,没有考虑当传感器资源有限时传感器跟踪能力限制的问题。Rényi信息增量通过比较概率密度函数的近似程度来表示当前状态下信息的差异,因而更加强调某个局部信息,从而能够根据目标的机动情况实时分配传感器资源,但当传感器系统的最大跟踪能力大于目标数时,容易造成传感器资源的浪费[3]。鉴于此,本文结合两种算法各自的特性,利用“Rényi信息增量”和“协方差”联合控制的思想相互验证并利用目标跟踪精度进一步完成传感器资源的分配。
1 问题描述
1.1 协方差算法描述
以协方差控制角度研究传感器管理问题其主要通过遍历所有传感器组来选择与期望协方差最靠近的实际协方差组合作为当前状态传感器组合[5-6]。本文结合规划类思想设置其最优的目标函数为:
协方差控制的传感器算法能够在维持有效跟踪精度的前提下,合理分配现有的传感器资源,但该算法并没有考虑到外界因素对量测误差的影响,容易引起跟踪性能下降。同时各时刻在最优组合的选择上并无关联性,因此,前后时刻使用的传感器组时常不同,这样频繁地切换传感器组合会在一定程度上造成系统的负担。
1.2 Rényi信息增量
Rényi熵是Shannon熵的广义形式,用以描述一个事件的信息,反映了系统信息的高阶特性。假设先、后验概率密度函数 p0、p1服从高斯分布,基于Shannon熵的信息增量[7]为:
Rényi信息增量被定义为:

若采用以卡尔曼滤波为代表的滤波算法,当得到目标状态估计的均值和协方差时,Rényi信息增量的计算公式可简化为[7]:
其中参数选取α=0.5可获得较好的跟踪性能[7]。
针对雷达组网系统中目标跟踪问题,因为传感器的差异化,不同传感器对目标量测后的后验概率密度也存在差异。因此,在当前时刻选择最优的传感器进行目标跟踪时,采用基于Rényi信息增量的传感器管理方法寻找tk时刻为系统带来最多信息的传感器jtk,如果不满足则寻找带来次优的传感器,直到满足要求。其目标函数可描述为:
传统的Rényi信息增益传感器管理算法偏重当前状态下为系统带来最大信息增益的传感器组合,容易造成部分目标被多个传感器跟踪,而某些目标未被跟踪,协方差控制效果并不理想[4]。而协方差控制算法是从控制每个目标尽可能接近其期望协方差角度来实现传感器的目标分配,但根据周文辉给出的Raccati方程的推导,当误差协方差矩阵保持不变时算法分配下的最优传感器组合Dopt(tk)也是固定的,导致特定的传感器组合一直跟踪固定的目标,因此,降低了跟踪精度和传感器资源利用率。本文结合两种算法各自的特点,利用“Rényi信息增量”和“协方差”两个并行目标函数来完成传感器资源的分配,该方法通过每次从组网传感器中选择“最优”的传感器组进行目标跟踪,而当两者形成的传感器组不同时,利用跟踪精度进行传感器组合的微调,若符合当前的跟踪精度则当前的传感器组是最优选择,若不满足则在当前传感器组的基础上适当地微调传感器组合以期达到合适的效果。
2 传感器管理算法及流程
2.1 算法思想及流程
图1表示基于Rényi信息增量和协方差联合控制的多传感器管理算法基本思想:一方面根据协方差控制原理,为当前状态选择使目标函数最小的最优传感器分配策略;另一方面利用并行处理的思想计算当前状态下为系统带来最多信息的传感器组合,然后验证两种算法下的式(1)、式(7)最优传感器组合是否相同,若不相同则利用误差协方差矩阵判断是否满足跟踪精度,在后续的传感器分配决策时不必重新分配传感器,而是利用上一时刻的传感器分配方案,在当前传感器分配方案基础上快速确定一组能够有效跟踪目标的传感器组合。
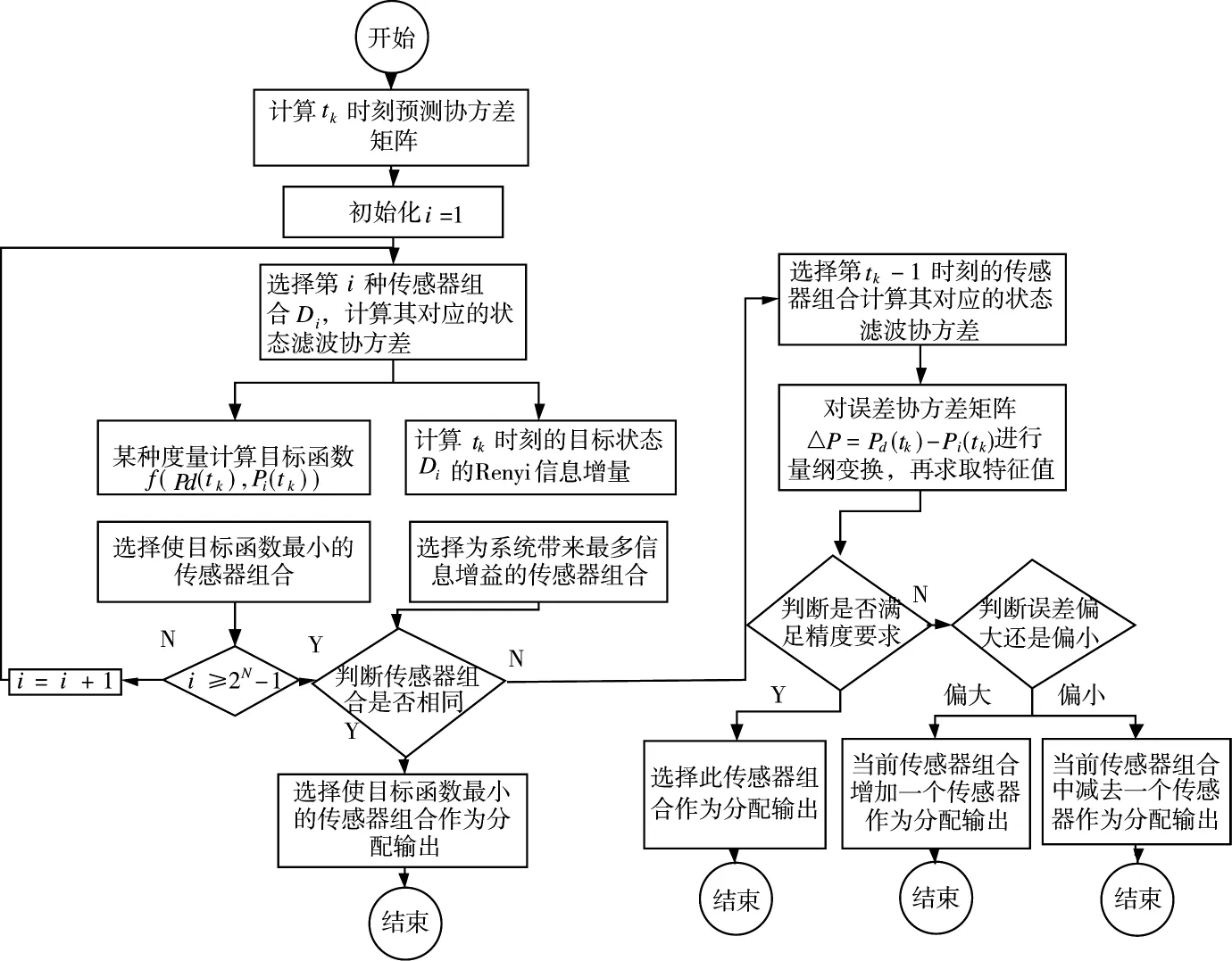
图1 算法流程图
2.2 跟踪精度判断
当偏差矩阵△P为正定矩阵,亦即其所有特征值均为正时滤波协方差所表示的各元素的误差均小于期望值,则说明满足跟踪精度,而当△P非正定时,则无法作出此判断。同时在不影响跟踪精度的前提下尽量降低计算量和传感器切换频率。本文为偏差矩阵特征值的判断设定了一个接近于零的上下限阈值。即使特征值不全为正,但只要它们均在零附近的一个较小的范围内,亦可认为满足精度需求。当特征值过大时,表示误差远远小于期望值,则可以从当前传感器组中减少一个传感器再进行观测;同理,当特征值过小时,可以增加一个传感器。
2.3 量纲变换
协方差矩阵中各元素的量纲是不同的,采用无量纲变换方法[10-12]。设和分别为期望协方差矩阵Pd(tk)的对角线元素,则无量纲变规则如下:
2.4 序贯卡尔曼滤波
在多个传感器工作时,针对时间上无法完全同步的问题采用序贯滤波的方法,按时间或优先级顺序,依次对各传感器获得的观测进行滤波,这样不仅能够解决时间同步问题,更有利于目标跟踪的连续性。对于tk时刻有J个传感器的传感器组Di,每个传感器获得的量测值可以当作预测时间为零的新的量测信息,然后序贯地加以滤波处理如下[13]:

3 仿真分析
本文提出基于Rényi信息增益和协方差联合控制传感器管理算法,并以跟踪精度(位置均方误差)、传感器组切换率作为评价算法性能的指标。
仿真场景1:单目标CV运动模型。
仿真对象以巡航导弹为例,巡航导弹按照规划或临时指定的路线飞行,除了上升下降转弯等情况,处于匀速平飞状态较多,所以用CV模型仿真[14]。
假设目标在[30 km×30 km]平面内运动,用3种类型共10部雷达组网对其进行跟踪,最大探测距离为200 km,量测噪声标准差如表1所示。

表1 量测噪声标准差
将本文提出的基于Rényi信息增益和协方差联合控制传感器管理算法分别与协方差算法和Rényi信息增益算法进行比较,仿真结果如图2所示。
由图2分析可知,当目标的运动模型为CV模型时,协方差算法虽然跟踪精度较好,但传感器切换率较高;Rényi信息增益算法传感器切换率相对减少,但使用传感器资源较多,同时位置均方误差偏大;本文算法结合两种算法各自的特性,保持了良好跟踪精度的同时又能适时地调整传感器分配策略。
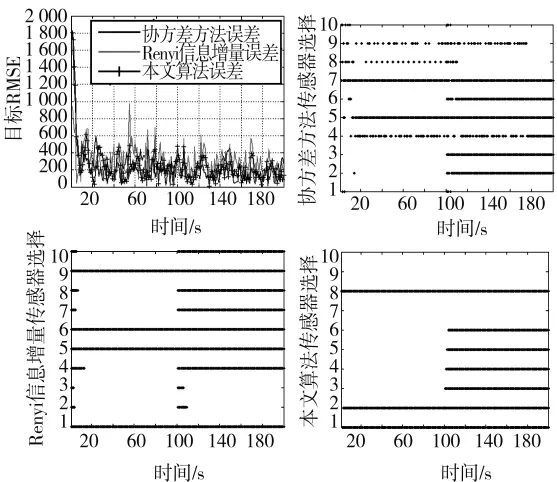
图2 CV模型仿真结果
仿真场景2:多目标CA运动模型。
针对低动态临近空间目标(如平流层飞艇,浮空平台等),隐身目标等机动性较强的特点,以CA模型仿真。
由3个不同类型雷达随机分布在[30km×30km]平面区域内组成探测网络对4个目标进行跟踪,3种雷达的数据获取概率为0.6,0.7,0.8,观测噪声均为闪烁噪声对应的观测距离误差分别为:20 m,250 m,300 m,闪烁效应系数分别为0.04,0.2,0.4.过程噪声服从零均值的高斯白噪声且相独立。同时考虑到前期粗略跟踪后期精确跟踪的参考因素,将期望协方差前半段变化较大而后半段变化较小。目标采用CA模型,目标初始状态分别为T1=[1 000 200 1 500 350 5 5]T,T2=[3 000-800 2 500 190 9 7]T,T3=[15 300-400 400 200 50 50]T,T4=[230 11 500 200 340 70 20]T;仿真时间110 s,采样周期为1 s。
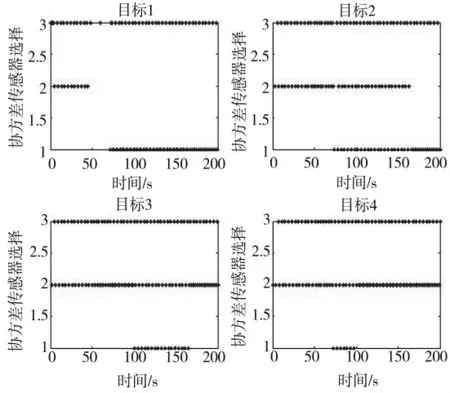
图3 协方差传感器分配分配情况
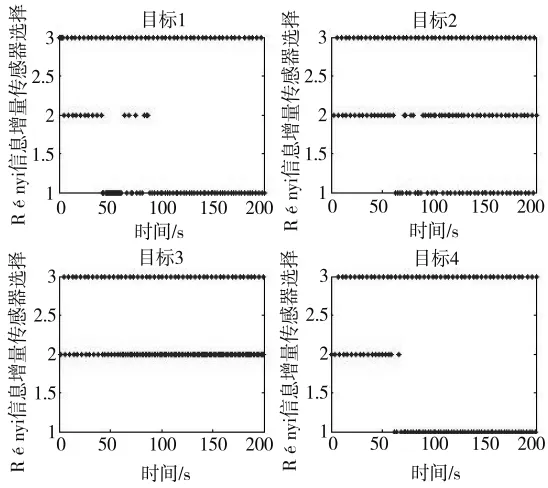
图4 Rényi信息增益传感器分配情况
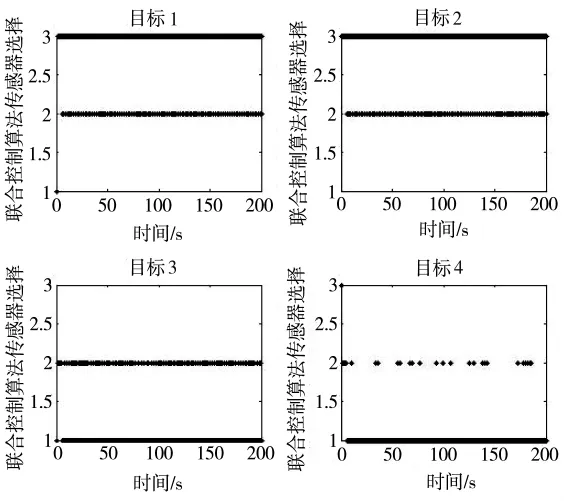
图5 Rényi信息增益和协方差控制传感器分配情况
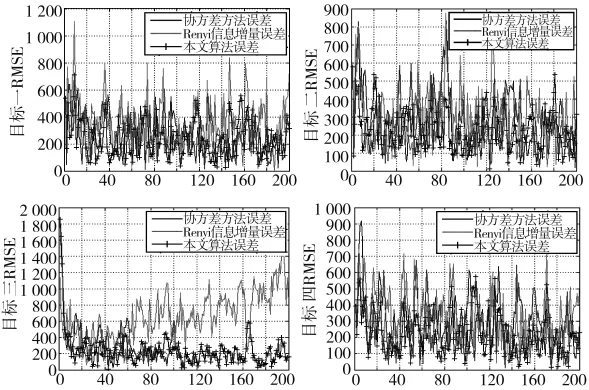
图6 4个目标位置均方误差图
图4中由于Rényi信息增益算法追求局部信息增量最大,在此仿真场景中由于传感器跟踪能力的限制,引起目标跟踪过程中出现失衡的现象,由图6中可知该算法牺牲了对目标3的跟踪精度,由图中各目标位置均方误差图可知,本文算法分别相对协方差和Rényi信息增益算法跟踪精度有了很大提高,但应该指出的是该算法相对于图2单目标匀速运动而言,在多目标匀加速运动场景中效果并不理想。
4 结论
本文在传统Rényi信息增益的传感器管理算法和协方差控制传感器管理算法的基础上,重点阐述了基于两者联合控制的传感器管理算法并给出了整个算法流程。在具体仿真设计环节,分为传感器跟踪能力大于目标数和传感器跟踪能力小于目标数两种场景。该算法相比于传统的Rényi信息增益算法和协方差控制算法,在单目标匀速、多目标匀加速等多数场景下保持了目标的跟踪精度,能够对目标进行有效跟踪。同时降低了传感器的切换频率,具有更好的实时性。
[1]刘先省,申石磊,潘泉.传感器管理及方法综述[J].电子学报,2002,30(3):394-398.
[2]KALANDROS M.Covariance control for multisensor systems[J].Aerospace and Electronic Systems,IEEE Transactions on,2002,38(4):1138-1157.
[3]刘先省,周林,杜晓玉.基于目标权重和信息增量的传感器管理方法[J].电子学报,2005,33(9):1683-1687.
[4]YANG H Y,YOU Z,WANG L.Dynamic sensor management for distributed tracking in collaborative network[J].Journal of South China University ofTechnology,2012,35(5);1000-1007.
[5]LIU Y,WANG H,HOU C.UKF based nonlinear filtering using minimum entropy criterion[J].Signal Processing IEEE Transactions on,2013,61(20):4988-4999.
[6]周文辉,胡卫东,余安喜,等.基于协方差控制的集中式传感器分配算法研究[J].电子学报,2004,31(B12):2158-2162.
[7]刘欣怡,赵诚,单甘霖,等.面向目标跟踪的基于Rényi信息增量多的传感器管理[J].信息与控制,2015,44(2):184-189.
[8]KUSCHEL H,HECKENBACH J,APPEL R.Countering stealth with passive,multi-static,low frequency radars[J]. IEEE Aerospace and Electronic Systems Magazine,2010,9(25):11-17.
[9]杨秀珍,何友,鞠传文.基于跟踪精度控制的传感器管理方法研究[J].电光与控制,2005,12(1):9-11.
[10]KALANDROS M,PAO L Y.Controlling target estimate covariance in centralized multisensor systems[C]//American Control Conference,1998.Proceedings of the 1998.IEEE,1998,5:2749-2753.
[11]HERO A O,COCHRAN D.Sensor management:Past,present,and future[J].Sensors Journal,IEEE,2011,11(12):3064-3075.
[12]周文辉.相控阵雷达及组网跟踪系统资源管理技术研究[D].长沙:国防科学技术大学,2004.
[13]马照英,杨莘元,杨雷,等.机动目标跟踪中的序贯滤波[J].应用科技,2006,33(6):49-50,109.
[14]巴宏欣,何心怡,何勇.基于网络中心站的信息融合结构研究[J].舰船科学技术,2012,11(34):89-93.
Multi Sensor Management Algorithm Based on Joint Control of Rényi Information Increment and Covariance
ZHU Wu1,2,PENG Dong-liang1,2,REN Gang1,2,LYU Peng-fei1,2
(1.Fundamental Science on Communication Information Transmission and Fusion Technology Laboratory,Hangzhou 310018,China;2.Hangzhou Dianzi University,Hangzhou 310018,China)
Based on target tracking radar networking scenario multisensor management issues,combining Renyi information increment and covariance characteristics of each algorithm,a sensor management algorithm based on joint Renyi information gain and covariance control using the idea of parallel processing is proposed.In specific aspects of the simulation design,sensor tracking ability is greater than the number of targets and sensors tracking ability and less than the target number of scenes.The simulation results show that the proposed algorithm can effectively track the target in most scenes,such as uniform speed,multi target uniform acceleration and so on.At the same time,the switching frequency of the sensor is better.
multisensor management,Rényi information increments,covariance control,parallel processing
TP953
A
1002-0640(2017)05-0042-05
2016-02-17
2016-05-17
国家自然科学基金资助项目(61174024)
祝 武(1991- ),男,安徽亳州人,硕士研究生。研究方向:信息融合,传感器管理。