乘用车加速踏板人机匹配设计与试验研究
2017-06-19任平吴光淮姜宇徐俊波张士金
任平,吴光淮,姜宇,徐俊波,张士金
(安徽江淮汽车集团股份有限公司,安徽 合肥 230601)
乘用车加速踏板人机匹配设计与试验研究
任平,吴光淮,姜宇,徐俊波,张士金
(安徽江淮汽车集团股份有限公司,安徽 合肥 230601)
为了提高加速踏板的操纵舒适性,提出了一种人机匹配设计方法。首先利用客观赋权法处理加速踏板人机匹配的各个性能指标;在此基础上,以某款乘用车加速踏板为研究对象,分别开展了扫描试验、静态试验及动态试验研究;基于主成分分析法对试验数据进行处理,分析了加速踏板行程和加速踏板力,膝角及踝角的关系,合理地匹配踏板参数和人体参数,验证了所提方法的正确性和有效性,该方法对于踏板操纵舒适性的研究具有指导意义。
加速踏板;人机匹配;试验研究
CLC NO.: U463.2 Document Code: A Article ID: 1671-7988 (2017)10-50-03
引言
加速踏板是驾驶员重要的操纵装置,用于改变发动机输出功率[1]。将人及人所控制的机器视作一个整体或系统即为人机系统[2]。加速踏板操纵就是一个典型的人机系统:驾驶员操作加速踏板同时,右脚也受到了踏板的反作用力。国内车辆人机工程研究起步较晚,近年来研究重点才逐渐转向人机工程在整车布置方面[3-4]。研究中对具体操纵装置的人机工程应用主要是通过该操纵装置的空间布局参数和人体生物力学结构参数来匹配设计的。也有以肌肉疲劳、应急反应等生理心理因素来研究人体的舒适性。还有以操纵装置的动力学特性参数如操纵位移等的变化规律来评价。
本文以某款加速踏板为研究对象,提出加速踏板人机匹配设计方法,同时开展了加速踏板的试验研究,分析了加速踏板的扫描试验、静态试验和动态试验下的人体参数、踏板参数及踏板性能对人机匹配设计的影响。
1、加速踏板人机匹配设计
加速踏板的人机匹配设计就是使人机系统总体设计达到最优。根据踏板布置规范[5],加速踏板感觉的设计需要考虑如下几个方面:a)应有合适的踏板力;b)应有合适的踏板行程;c)一定阻尼、力变化要求等。
同时人体参数是研究人机系统必不可少的因素,可以校核驾驶舒适性及检查踏板、座椅等部件的布置合理性。采用客观赋权法对加速踏板的人机匹配进行评价:

式中:F1,F2,F3,F4,L1,L2分别代表最大踏板力、踏板回弹力、踏板预载力、踏板迟滞力、踏板自由行程以及最大踏板行程。
对I进行归一化处理,得到各个指标的权重:

式中:V为各个指标的均值与标准差的比值。
则加速踏板的操纵舒适性为各个指标的权重*各个指标标准下的性能得分。
2、加速踏板试验设计
对某乘用车加速踏板人机匹配设计进行试验研究,试验选择MSP-S-200mm拉线式传感器测试踏板行程、HKM踏板力传感器测试踏板力,Crossbow VG440陀螺仪测量车辆运动信息,传感器及陀螺仪的安装位置如图1所示。

图1 测量设备安装位置
2.1 扫描试验
利用Creaform扫描仪扫描汽车驾驶室,对驾驶室地毯、左右档板、座椅的四个状态、踏板状态面、及汽车A座出处点云的结构参数进行扫描(图2)。建立试验车辆的点云模型(图3)。通过点云处理得到人机参数及踏板结构参数(表1)。

图 2 人机参数扫描

图3 踏板点云图
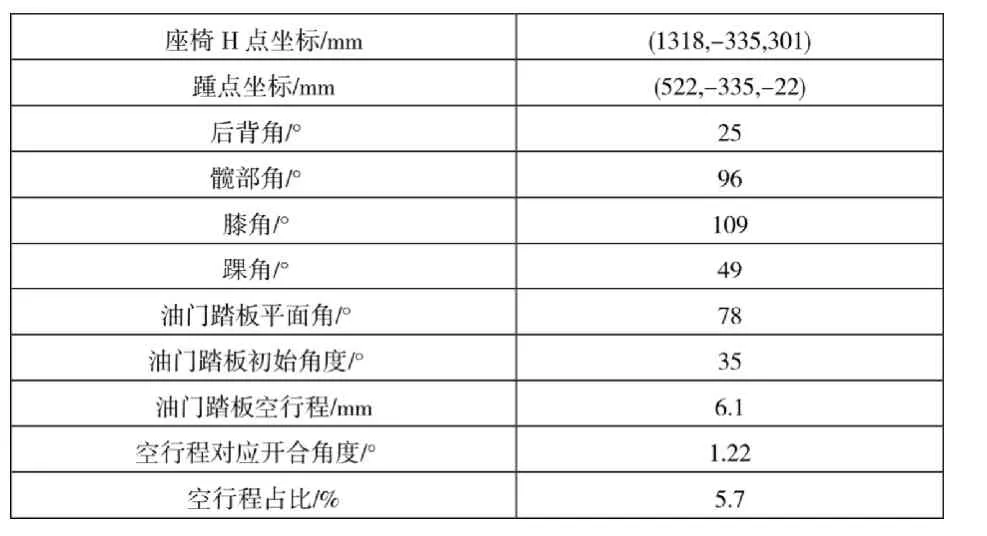
表1 人机参数及踏板结构参数
2.2 静态试验
关闭发动机进行加速踏板静态试验:加速踏板力均匀增加(使踏板力和踏板行程的关系接近线性)至油门踏板开度踩最大开度,记录整个过程的踏板力及踏板行程曲线如图4所示。通过测量踩踏过程中力和位移的关系,可定性地反应出人的操作感受,即“脚感”。通过踩踏过程中动态地测量踏板力和位移,并实时显示出力和位移的关系曲线,通过曲线的形状和数值关系就可反应出被测踏板的性能状态。由图3可知:加速踏板的最大行程为106.8mm,最大踏板力为66.4N,踏板回收力为24.6N。
2.3 动态试验
踏板工况试验在江淮试验场地进行,从得到的数据中选取较好的一段作为本次的试验结果数据。驾驶员从静止分别加速至10km/h、20km/h、30km/h、40km/h、50km/h、60km/h、80km/h、和120km/h,并维持5—10s,直至油门开度稳定。每组试验重复5次,加速过程中,控制好加速踏板使车速近似匀速增加[6]。
将试验测得的原始数据进行滤波处理[7],应用Matlab提供的firpm命令设计了低通FIR滤波器,并可在程序中修改滤波器的参数,实现对数据进行较好的滤波处理。对试验测得的大数据进行截取,设定各个参数相邻峰值之间的数据为一个周期输入。通过应用软件对筛选条件的判定,得出正常的分段截取的数据。由于截取得到的各段数据长度不等或采样数可能较少,因此需对数据进行插值处理。对以上截取的有效数据,采用线性插值,插值目标点数量满足计算精度要求即可。用Matlab编制试验数据处理程序,使用Matlab中的FastICA模块实现ICA(独立成份分析)/PCA(主成分分析)处理功能,对试验数据进行处理。
如图5为整个实验过程中加速踏板力随加速踏板行程变化的曲线。图6为车速和加速度随加速踏板行程变化的曲线。分析图5、6,根据常用车速(60km/h),得出加速踏板的常用行程为27.8mm(5.6°),常用力为18N。
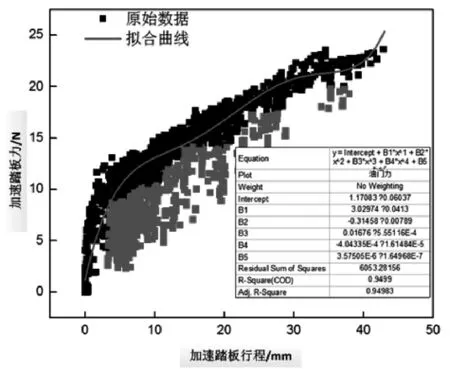
图5 加速踏板力随加速踏板行程的变化关系
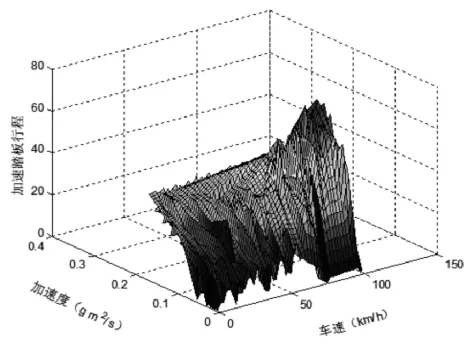
图6 车速和加速度随加速踏板行程变化的关系

图7 加速踏板行程和膝角及踝角的关系
根据加速踏板的常用行程,利用Adams软件对人体下肢进行运动学仿真,得出如图7所示的曲线。从图7中可以看出在常用踏板行程范围内,膝角和踝角均随着加速踏板行程的增加而增加,且均基本呈线性关系。根据加速踏板的常用区间,得出行驶工况下跟人体有关的参数,如表2。
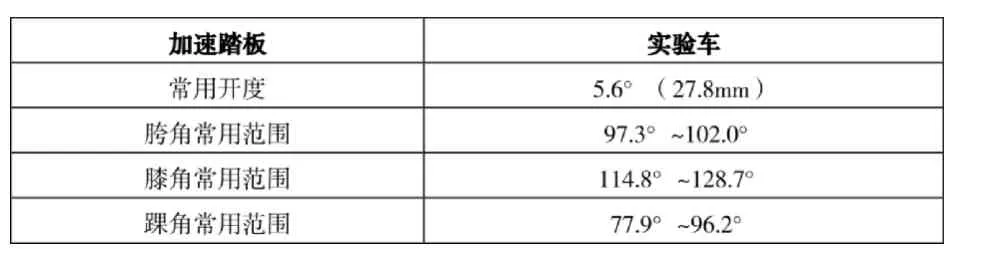
表2 加速踏板动态人机参数
3、结论
1)根据踏板布置规范,提取加速踏板的感觉设计要求,利用客观赋权法建立了加速踏板的人机设计的评价指标。
2)分别开展了驾驶室的扫描试验、加速踏板的静态和动态试验。通过滤波处理及主成分分析法处理试验数据,研究分析了人体参数、加速踏板结构参数以及加速踏板性能之间的关系,验证了该设计方法的有效性,对踏板人机工程设计提供了数据参考。
[1] 汪东坪,李舜酩,魏民祥,于海生. 汽车电子加速踏板可靠性控制的研究[J]. 汽车工程,2012,(08):713-717.
[2] 刘春荣编著.人机工程学应用[M].上海:上海人民美术出版社, 2009.1
[3] Lars Hansona, Willfried Wienholt, Lena Sperlingc. A control handling comfort model based on fuzzylogics [J]. International Journal of Industrial Ergonomics, 2003, (31), p87-100.
[4] 王福成. 轿车总布置设计中人机工程应用的方法研究[D].吉林大学,2007.
[5] Q/JLY J7110355A-2011,三踏板布置规范[S].
[6] GB/T 12534-1990,汽车道路试验方法通则[S].
[7] 陈弘. 汽车碰撞试验中模拟和数字滤波器的实现[J]. 汽车工程,1998,(02):84-89.
Design and Experimental Study on the Man-machine Matching of Passenger Car Accelerator Pedal
Ren Ping, Wu Guanghuai, Jiang Yu, Xu Junbo, Zhang Shijin
( Anhui Jianghuai Automobile group Co. Ltd., Anhui Hefei 230601 )
In order to improve the comfort of the accelerator pedal, a design method of man-machine matching is proposed. Firstly, the objective weighting method is used to deal with the performance indexes of the accelerator pedal; On the basis of this, taking a certain passenger car accelerator pedal as the research object, the scanning test, static test and dynamic test were carried out; Based on the principal component analysis (PCA), the relationship between the acceleration pedal stroke, the pedal force, the knee angle and ankle angle was analyzed, the correctness and effectiveness of the proposed method are verified by matching the parameters of the pedal and the human body. This method is of guiding significance for the study of pedal control comfort.
Accelerator pedal; man-machine matching; experimental study
U463.2
A
1671-7988 (2017)10-50-03
10.16638/j.cnki.1671-7988.2017.10.018
任平,就职于安徽江淮汽车集团股份有限公司。
