上肢康复机器人建模与力反馈控制策略实验研究
2017-06-15李雅楠左国坤崔志琴施长城刘永永
李雅楠,左国坤,崔志琴,施长城,刘永永
(1.中北大学,太原 030051;2.中国科学院宁波材料技术与工程研究所,宁波 210094)
上肢康复机器人建模与力反馈控制策略实验研究
李雅楠1,2,左国坤2,崔志琴1,施长城2,刘永永2
(1.中北大学,太原 030051;2.中国科学院宁波材料技术与工程研究所,宁波 210094)
为改善患者在使用上肢康复机器人过程中的人机交互感,提升康复训练中人的体验感,在经典控制策略中加入力反馈环节。建立基于力反馈控制算法的上肢康复机器人控制模型。基于Simulink对力反馈控制算法进行仿真,获取实验结果并进行验证分析。通过仿真实验能够得出力反馈控制算法的有效性,并利用上肢康复机器人进行实验验证。实验结果表明该力反馈控制模型的有效性患者主动参与康复训练的目的。
上肢康复机器人;力反馈控制;康复训练;建模分析
0 引言
上肢康复机器人是一种用于脑卒中等运动功能损伤患者进行物理治疗的康复机器人。20世纪80年代,全球有50多个从事康复机器人研究的机构[1],这些机构大多分布在科技和工业发达的美国、欧洲和日本等。1990年之后康复机器人开始受到全世界范围内科研工作者的重视[2]。上肢康复机器人训练动作设计合理、趣味性强,可明显提高患者的依从性、训练积极性、主动性和康复信心[3]。
传统康复医学领域中的康复训练存在一些不足和局限性,若将虚拟现实技术、力反馈技术同机器人相结合并利用力反馈控制方法,应用到康复训练中[4]。能够有效改善传统康复训练方法的不足。也有研究指出,外科医生和机器人专家认为现在已有的机器人康复训练系统缺少必要的接触反馈[5]。伴随着康复治疗领域中虚拟现实技术与力反馈技术的深入应用,康复机器人势必会带来一种全新的意义深远的训练手段。
康复机器人的应用领域里,反馈技术和虚拟现实技术有其不可取代的地位和必要性。基于此,本文对上肢康复机器人进行力反馈控制研究,构建力反馈控制策略模型,并利用MATLAB/Simulink实验平台建立仿真试验系统,验证分析该策略的性能。与以往国内上肢康复机器人控制方法研究的不同[6],文中的上肢康复机器人包括主动训练模式,助动训练模式,被动训练模式和示教模式四种训练模式。而本文的研究是在康复机器人主动模式下进行的。

图1 控制系统框图
1 上肢康复机器人系统建模
1.1 上肢康复机器人
上肢康复机器人系统由上肢康复机器人机构本体、力传感器、编码器、驱动电路、信号处理电路以及虚拟现实场景工控机构成。
康复训练时,患者的手放在机器人末端带有把手的托盘上(安装有六位力传感器,测量患者手臂与机器人之间相互作用力),由工控机上的硬件操作平台发出操作命令,经D/A通道传送给电机驱动电路,驱动机器人运动;当患者手臂对机器人有力作用时,由A/D模块把力信号传送给控制系统进行运算,从而使患者在机器人的带动下进行康复训练,系统控制框图如图1所示。
1.2 上肢康复机器人运动学模型
上肢康复机器人运动学的求解实际上就是对康复机器人中摇杆运动的求解。摇杆结构如图2(a)所示。为了分析摇杆机构,需获得手柄末端的位置,并对其运动学分析。将摇杆部分结构简图简化为图2(b)几何空间示意图。分别设定摇杆两侧电机的轴心作为x、y、z轴,摇杆的垂直方向作为z轴,构成初始三维坐标系O1、x、y、z为基坐标。手柄末端构成末端坐标系O2、x、y、z。通过编码器可以获得x、y、z电机的转角 θx,θy, θz,其中L为θz的函数。
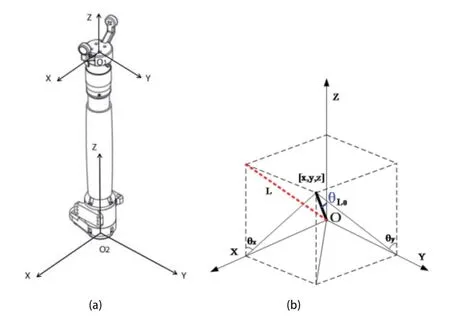
图2 上肢康复机器人摇杆结构简图
可推倒出上肢康复机器人的位姿为:
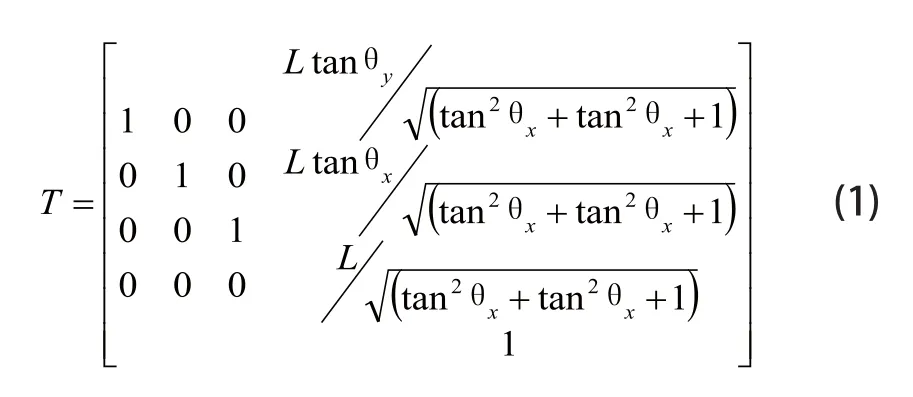
对运动学模型进行逆向求解得到逆向运动学模型:

1.3 上肢康复机器人动力学模型
本文中将空间摇杆投影到OXZ平面进行分析。摇杆在OXZ平面上投影简图如图3所示。其中OB为摇杆固定杆长部分投影,长度为l0y,质量为m0。活动杆在初始位置时固定杆内部,后期通过Z轴电机从固定杆中进行伸出运动。AB为活动杆长部分投影长度为l1y,质量为m1,通过拉格朗日方程对上肢康复机器人进行求解能够推导出x方向上有公式:

其中i0表示电机传动比,本文中取值为1/200。

图3 上肢康复机器人摇杆平面简图
2 力反馈控制策略设计
根据本文上肢康复机器人的运动学和动力学模型,可设计出经典阻抗控制策略,本文在经典控制方法中引入力反馈环节[7],搭建力反馈控制策略模型。如图4所示。

图4 上肢康复机器人力反馈控制框图

图5 上肢康复机器人力反馈控制策略Simulink仿真图
3 仿真实验与结果分析
根据上肢康复机器人力反馈控制框图构建相应的仿真框图。对x方向动力学方程进行拉普拉斯变换能够得到传递函数,其中传递函数:

绘制Simulink仿真图如图5所示。
对力反馈控制策略进行仿真。仿真结果如图6所示。
首先验证系统阶跃响应曲线,能够得到图6。
系统的阶跃响应曲线如图6所示,不难看出,本文所提出的力反馈控制策略通过合适的阻尼比和自然频率使得系统处于稳定状态。
拟定输入正弦波速度信号时,位移轨迹跟踪仿真结果图7所示。其中实线表示参考轨迹位移曲线,虚线表示实际位移曲线。从结果图7(a)可以看出,在未加入力反馈环节时实际轨迹对参考轨迹跟踪效果较差,在初始1s内存在一定位置的位移差。6s时达到轨迹跟踪最大位移差。加入力反馈环节与未加入力反馈环节的速度对比图。其中实线表示系统输入信号,虚线表示经过系统给的输出信号。而从结果图7(b)可以得出,在加入力反馈环节后实际位置和参考位置误差较小,运动性能得到明显改善。对比两次仿真结果,不难看出,力反馈环节对系统位移跟踪性能有明显提高。

图6 阶跃响应曲线

图7 位移轨迹跟踪图

图8 速度轨迹跟踪图
图8表示未加入力反馈环节速度与加入力反馈环节速度轨迹图。从图8(a)可以看出,初始运动时实际速度与参考速度相差并不大,但随着时间增大,速度跟踪呈现发散状态,8s到10s时速度差可以看到明显增大,此时系统性能不好,无法准确输出参考速度值。加入力反馈环节后,如图8(b)所示,仿真运动过程中,实际输出速度虽与参考速度存在些许偏差,但与图8(a)相比已得到明显改善。对比(a)、(b)两图不难看出,文中提出的力反馈控制策略在速度跟踪效果中有明显的改善作用。
4 结论
仿真分析验证了力反馈控制策略的可行性,通过仿真结果分析也可以看出力反馈控制策略应用与上肢康复机器人有其显著优势。在控制过程中加入力反馈环节对上肢康复机器人运动性能能有明显的改善。想要实现上肢康复机器人的力觉交互体验感,力反馈环节是系统必不可少的控制前提。
本文进行的相关实验研究属于康复机器人的基本系统设计实验研究,后期结合康复治疗理论将开发相应的虚拟现实环境[8]以及完善的治疗评估系统。
完善设备的机械结构和控制策略后,课题组接下来的主要工作包括:临床实验的验证,增加实验样本。在提高机器柔顺性的同时结合脑电,肌电信号,肢体姿态信息综合评估机器人的训练能力以及康复效果[9]。
[1] Prior,S.D.,P.R. Warner. A review of world rehabilitation robotics research. in High-Tech Help for the Handicapped[A].IEEE Colloquium on. 1990[C].IET.
[2] 张付祥,付宜利,王树国.康复机器人研究进展[J].河北工业科技, 2005.22(2).100-105.
[3] 梁天佳,吴小平,莫明玉.上肢康复机器人训练对偏瘫患者上肢功能恢复的影响[J].中国康复医学杂志,2012.27(3).255-256.
[4] Tang J Carignan,C Gattewar. Virtual Environment for Robotic Tele-Rehabilitation[A].IEEE International Conference on Rehabilitation Robotics[C].2005:365-370.
[5] 付宜利,李坤,潘博,等.微创手术机器人力检测与力反馈技术研究现状[J].机器人,2014,36(1):118-120.
[6] 胡进,侯增广,陈翼熊,等.下肢康复机器人及其交互控制方法[J].自动化学报,2014,40(11):2379-2381.
[7] 陈明哲.机器人控制[M].北京航空航天大学出版社,50-51.
[8] 吴常铖,宋爱国,李会军,等.一种上肢康复训练机器人及控制方法[J].仪器仪表学报,2014,35(5):999-1001.
[9] 张立勋,杨勇,张今瑜.等.手臂康复机器人阻抗控制实验研究[J].哈尔滨工程大学学报,2008,29(1):69-72.
Upper-limb rehabilitation robotc modeling and force feed back control research
LI Ya-nan1,2, ZUO Guo-kun2, CUI Zhi-qin1, SHI Chang-cheng2, LIU Yong-yong2
TP13
:A
:1009-0134(2017)05-0037-04
2017-01-13
宁波市社会发展重大科技专项(2016C11021)
李雅楠(1991 -),女,河北保定人,硕士研究生,主要从事虚拟现实、力觉交互、力反馈控制方面研究。
