高速列车座椅自动旋转控制器设计
2017-06-13仇维斌
仇维斌,陈 辉,严 岩
(1.今创集团股份有限公司,常州213102;2.江苏科技大学,镇江212003;3.今创集团股份有限公司,常州213102)
0 引 言
近年来,高速铁路在我国得到了高速度发展,随着其速度稳步提升,出行有了更好选择。考虑到乘客乘坐的舒适感,目前运营高速列车的座椅朝向均与列车行驶方向一致。由于部分列车到站时需要反向行驶,因此座椅朝向也需实时调整180°,从而使得朝向一致。而目前均是在列车到站时由人工旋转其朝向,故需一定的人力成本,并且效率较低。为此,设计开发了一套座椅控制系统。高速列车座椅控制系统是由多个部分组成的复杂控制系统,其中包括司机室主控制屏、无刷直流电动机、座椅控制器(以下简称SCU)、控制器局域网(以下简称CAN)、多功能车辆总线(以下简称MVB)及列车控制和管理系统(以下简称TCMS)等。司机室主控制屏可实现对所有座椅实时控制与状态监视[1-3]。SCU在本系统中主要接收司机室传达的座椅旋转控制命令,并且根据命令驱动电机执行相应的动作,同时可将座椅的故障及状态信息通过总线反馈至主控制屏。SCU在主控制屏与座椅之间起着重要的桥梁作用,直接关系到整个座椅控制系统的正常运行。因此,为了提高系统的安全运行,本设计在软件及硬件方面均做出优化处理。
1 系统功能
SCU需具有以下主要功能:
(1)座椅正反旋转180°时间在10~20 s范围内可调;执行正反旋转时,SCU可按预设的速度曲线做出相应动作。
(2)通信功能,通过CAN网络实现整节车厢SCU通信功能,并通过MVB总线实现与司机室的通信,将座椅状态、故障信息的上传同时接收控制命令。
(3)串口下载应用程序功能。
(4)通过电流、位移/速度两种方法进行障碍物检测,并可根据实际情况通过便携式测试设备(以下简称PTE)适当调整开闭延迟时间及障碍物循环次数等参数。
2 系统硬件设计
系统以STM32F407芯片为核心部件,ADC、集成SPI、数字 IO、CAP口捕获、MVB通信、CAN 通信等功能。图1所示为主、备用SCU硬件整体框架图,其中从SCU在硬件上没有MVB模块。
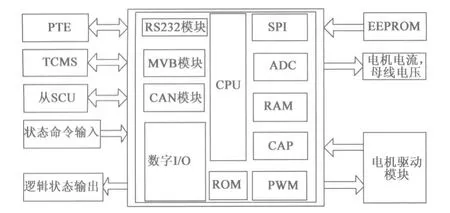
图1 系统整体架构图
CPU模块:根据系统需求选用高性能控制芯片STM32F407作为控制器主芯片,时钟频率最高可达168 MHz,具有高速的数据处理能力,并具有32位浮点处理单元,其有两个高级定时器可以同时产生多达7路的PWM输出[4]。
RS232模块:实现与 PTE的通信,可通过PTE适当调整开闭延迟时间及障碍物循环次数等参数。
MVB模块:此模块与TCMS系统连接,可将座椅状态、故障信息上传到TCMS同时接收TCMS发送的控制命令[5-6]。
CAN模块:可实现主 SCU与从 SCU的通信。主SCU将司机室发出的控制信号通过CAN总线发送到从SCU,同时从SCU将状态信息、故障信号通过CAN总线上传至主SCU。
数字I/O口:接收限位开关传递的输入信号,同时根据座椅执行相应动作而产生输出信号,实现对电磁阀通断控制控制信号。
CAP模块:电机HALL捕获口,实现对HALL信号的捕获。
ADC模块:实时检测电机母线电压及三相电流,用于矢量控制电流环闭环运算及障碍物判断。
SPI模块:故障信息存入EEPROM。
拨码开关:通过设置拨码开关确定每个座椅控制器的CAN地址。
电机驱动模块:包括电机驱动信号PWM发出及霍尔信号采集,其中驱动功率部分采用智能功率模块,与MOS管相比具有明显的体积优势及更优的保护性能。当故障发生时,可迅速将信号送至CPU,从而关断功率模块,有着很好的保护性能。
本系统主要完成对座椅状态信息采集、座椅自动旋转逻辑分析、座椅驱动控制、座椅故障记录与处理;CAN总线实现主SCU与从SCU的通讯;通过MVB接口可实现与TCMS的通讯;并通过PTE可实现参数设置、数据显示及故障下载等功能。
3 系统软件设计
SCU软件设计部分由逻辑部分、通信部分及电机控制构成。其中逻辑控制单元主要完成对外部座椅状态开关量信号采集、座椅旋转方向判断与控制、障碍物检测及故障记录等功能。通信部分主要实现SCU与司机室的通信,实现控制命令的接收及故障信息的上传,同时实现与本节车厢从SCU的数据交换。电机驱动部分主要完成对电机的运动控制,实现座椅的正反旋转。
3. 1逻辑控制单元软件设计
3.1.1 逻辑控制单元设计
逻辑控制单元如图2所示,系统结合当前状态及输入信号判断是否进入下一状态。其中图2中F为故障状态。

图2 逻辑控制单元流程框图
3.1.2逻辑控制单元时间片设计
本单元软件设计流程如图3所示,由运动状态监控、速度监控等子程序构成高优先级任务,由CAN数据处理、RS232数据处理等子程序构成低优先级任务,最后由CAN数据发送、RS232数据发送、MVB数据发送、故障记录存入EEPROM构成空闲任务[7]。系统设有2 ms定时周期中断,各不同等级任务按照图3循环运行。同时,不定时执行中断任务和空闲任务[8]。

图3 时间片分配图
空闲任务执行中检测当前数据是否正在发送,若是,则执行下一个任务,若不是,则写入一个字节到缓冲区。
中断任务主要执行当前产生的中断事件,包括完成定时器中断处理及多种通信中断接收。
3.1.3障碍物检测软件设计
障碍检测断子程序主要判断座椅旋转过程中有无遇到障碍物。本系统采用位移、速度及电流法对是否有障碍物判断。在旋转过程中每2 ms执行一次障碍物判断,其程序框图如图4所示。在座椅旋转过程中,若连续多次检测到电流超阈值或位移、速度小于设定值,则判断有障碍物,并进行逻辑切换。

图4 障碍物检测流程图
3. 2电机驱动控制单元软件设计
本设计根据实际需求采用了无刷直流电动机。常用的无刷直流电动机方波驱动方式使得电机运行较容易实现,占用CPU资源少,但是其控制效率较低。因而本设计采用了矢量控制方法,以提高其控制效率。其控制框图如图5所示,本设计采用id=0的矢量控制方法。

图5 矢量控制框图
电机驱动控制程序主要在ADC中断中完成,电流、电压等信号采集定位在PWM发生定时器上溢出点。如图6所示,中断子程序主要完成相电流采样与转换,同时实时获取当前转速信息,以实现d,q轴电流解耦,最后通过2个电流环PI调节输出当前控制量并送入SVPWM进行PWM输出计算。

图6 ADC中断子程序
3. 3通信单元软件设计
3.3.1 MVB通信模块程序设计
MVB通信模块可实现TCMS与SCU之间的数据通信。其接收TCMS的控制命令和设定的系统参数,同时将座椅系统的相关数据发送给TCMS。本设计中MVB数据通信采用“数据收发缓冲池”的方式实现,如图7所示。即将需要发送的数据及接收的数据存入缓冲区中,等到时间片无任务执行时再进行相应的处理,从而避免了数据通信与其它任务争夺CPU时钟周期[9]的问题。
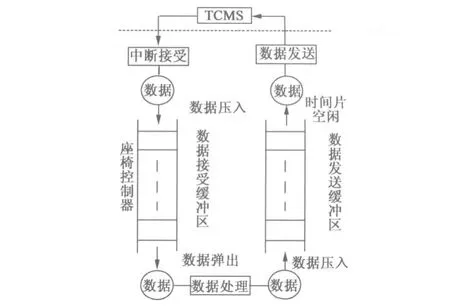
图7 MVB通信模块数据处理框图
3.3.2 CAN通信模块程序设计
CAN通信程序主要由数据发送、接收及处理构成。定时中断CAN发送子程序主要实现SCU中故障与状态信息的定时发送,CAN中断接收子程序主要实现故障与状态信息的接收。

图8 CAN通信的数据发送与接收框图
图8 为主SCU与备用SCU之间CAN通信方式以及CAN通信的发送与接收处理。主、从SCU内部均开设数据发送及接收缓冲区,从SCU的主程序不停对状态数据进行刷新,并每隔500 ms发送一次信息,同时接收来自主SCU的控制命令。主SCU将接收到的状态信息汇总后发送给TCMS[10],同时接收来自TCMS的命令并转发到本车厢内其它SCU。
4 实验结果及结论
本设计中选用的电机定子电压为直流110 V,功率120 W,磁极对数5。图9为所设计的自动旋转座椅实物图,其中SCU位于座椅下方。图10为系统正常工作时的线电压,其范围为-110~110 V。

图9 座椅实物图

图10 线电压波形(截图)
本设计中需要实时检测相电流波形,从而对障碍物信号判断。当座椅正常旋转时的电流为正弦波,电流幅值为1.8 A,如图11所示,当遇到障碍物时电流幅值会突增,最大可达5 A,如图12所示。由此可以检测出是否有障碍物发生。

图11 座椅正常旋转时相电流(截图)

图12 座椅旋转遇遇障碍物时相电流(截图)
本文详细介绍了一种基于STM32F407的高速列车自动旋转座椅控制器硬件及软件设计。目前,该产品已顺利完成研发,并且均通过功能试验、冲击振动试验及EMC试验等,试验结果表明此座椅控制器可满足高速列车的运行需求。
[1] 朱书娟,徐刚,陈勇胜,等.浅谈高速动车组车门通信系统[J].中国科技博览,2013(24):464-464.
[2] 关和宁.城轨车辆列车监控系统的设计及应用[D].北京:北京交通大学研究生院,2008.
[3] 朱琴跃,谢维达,谭喜堂.MVB协议一致性测试研究与实现[J].铁道学报,2007,29(4):115 -120.
[4] 廖义奎.ARM Cortex-M4嵌入式实战开发精解 -基于STM32F4[M].北京:北京航空航天大学出版社,2013.
[5] 宋佳璟,刘志刚.基于CANopen列车通信网络的地铁门控系统设计[J].机电控制技术,2008.37(8):25 -29.
[6] International Electrotechnical Commission.Electric Railway Equipment-Train Bus-Part 1:Train Communication Network(IEC61375-1) [S].1999.
[7] 仇维斌,严岩,黄巧亮,等.基于MC56F8346控制器的塞拉门控器研究[J].机电设备,2015(1):7 -11.
[8] 仇维斌,欧红香.一种基于TMS320LF2407A的地铁屏蔽门门机控制器设计[J].微电机,2009,42(9):37 -39.
[9] 陈铁军,谢春萍.PC机与RS485总线多机串行通信的软硬件设计[J].现代电子技术,2007,30(5),103 -105.
[10] 高松,高燕,王吉华.SAE J1939协议在车辆上的应用[J].拖拉机与农用运输车.2007,33(6):1-2.